一種基于工業機器人的仿真測試方法與流程
本發明涉及工業機器人相關領域,具體為一種基于工業機器人的仿真測試方法。
背景技術:
1、工業機器人應用廣泛,涉及制造、組裝、搬運等多個場景。為確保機器人在復雜工作環境中的穩定性和可靠性,需要進行嚴格的測試。現有的測試方法多為現場實際操作或者單一環境下的重復性能測試,無法全面模擬實際工況,而且成本較高,周期較長。
技術實現思路
1、本發明的目的在于提供一種基于工業機器人的仿真測試方法,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:一種基于工業機器人的仿真測試方法,包括以下步驟:
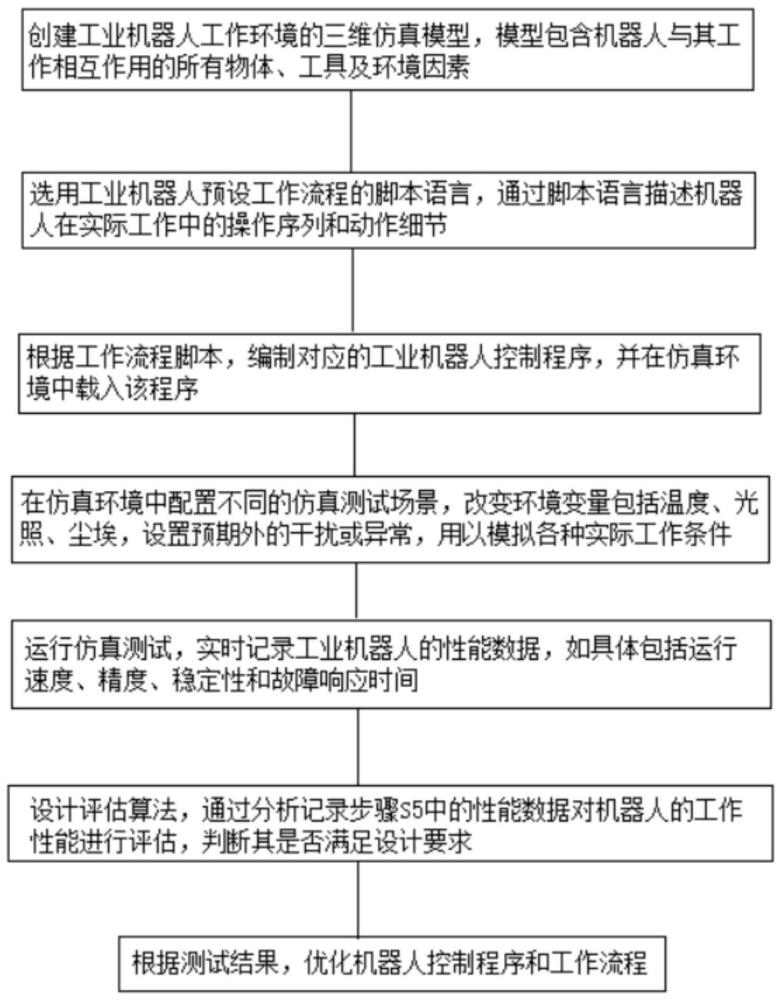
3、步驟s1、創建工業機器人工作環境的三維仿真模型,模型包含機器人與其工作相互作用的所有物體、工具及環境因素;
4、步驟s2、選用工業機器人預設工作流程的腳本語言,通過腳本語言描述機器人在實際工作中的操作序列和動作細節;
5、步驟s3、根據步驟s2中描述的工作流程腳本,編制對應的工業機器人控制程序,并在仿真環境中載入該程序;
6、步驟s4、在仿真環境中配置不同的仿真測試場景,改變環境變量包括溫度、光照、塵埃,設置預期外的干擾或異常,用以模擬各種實際工作條件;
7、步驟s5、運行仿真測試,實時記錄工業機器人的性能數據,如具體包括運行速度、精度、穩定性和故障響應時間;
8、步驟s6、設計評估算法,通過分析記錄步驟s5中的性能數據對機器人的工作性能進行評估,判斷其是否滿足設計要求;
9、步驟s7、根據測試結果,優化機器人控制程序和工作流程。
10、優選的,所述步驟s1中創建工業機器人工作環境的三維仿真模型的具體步驟如下:
11、步驟s11、確定工業機器人工作環境的復雜程度,包括物理空間的大小、工作物體的種類與數量、以及工具設備的類型;明確仿真模型的目的,包括設計驗證、性能測試、教育培訓或者控制算法的開發;
12、步驟s12、獲取工業機器人的準確幾何數據、運動學和動力學參數;收集工作環境中相關物體和工具的尺寸、質量和材料屬性;調研所需的環境因素數據,包括溫度、濕度、照明、噪聲;
13、步驟s13、運用專業的三維建模軟件建立準確的工業機器人幾何模型;按實際分布情況布置工作環境中的相關物體和工具;
14、步驟s14、導入機器人的運動學和動力學模型,確保模擬的機器人運動與真實機器人一致;設定環境特性,包括摩擦系數、空氣阻力、重力加速度、照明參數;
15、步驟s15、添加可交互式的用戶界面,使操作者實時調整機器人的參數或操作路徑,并觀察變化;
16、步驟s16、根據需求選擇matlab仿真引擎,確保支持所需的物理仿真和可視化展示;將基礎三維模型與仿真引擎相集成,轉換為可以進行動態仿真的工作模型;
17、步驟s17、對三維仿真模型進行校驗,確保所有的尺寸、運動參數與實際相符;
18、步驟s18、開始對三維仿真模型試運行,通過仿真模型模擬機器人實際工作情況,記錄運動性能和環境交互的數據;分析數據,確認模型的準確性,如果發現問題,需返工調整三維模型的詳細設置。
19、優選的,所述步驟s13中專業的三維建模軟件包括solidworks、autodeskinventor或maya中一種。
20、優選的,所述步驟s6中設計評估算法,通過分析記錄步驟s5中的性能數據對機器人的工作性能進行評估,其評估包括以下內容:
21、a、精確度評估:評估工業機器人在進行定位任務時的精確度
22、數據收集:機器人每次達到預定位置時,記錄其實際位置坐標和預定目標坐標;評估指標:精確度使用定位誤差來量化,具評估公式為:
23、
24、其中,ei表示第i次定位的誤差,xti,yti,zti表示目標坐標,zai表示實際坐標;
25、b、重復性評估:工業機器人生產線上重復執行同一任務,需要評估其重復性
26、數據收集:記錄工業機器人多次完成同一任務時的性能數據;評估指標:重復性用任務完成情況的一致性來衡量,其評估公式為:
27、
28、其中,r表示重復性,σ表示性能數據的標準差,μ表示平均值;
29、c、響應時間評估:工業機器人響應指令的速度是衡量工作性能的指標;
30、數據收集:記錄從發送控制指令到機器人開始響應之間的時間間隔;評估指標:響應時間,其計算公式為:
31、
32、其中tavg表示平均響應時間,ti是第i次的響應時間,n是總實驗次數;
33、d、效率評估:機器人在執行任務時的效率可以通過工作周期時間和成功率來評估;
34、數據收集:記錄完成任務所需的周期時間,以及成功執行任務的比例;評估指標:效率用成功率與平均周期時間的比值來描述,具體公式為:
35、
36、其中eff表示效率,s表示成功率,tavg表示平均周期時間。
37、與現有技術相比,本發明的有益效果是:本發明通過創建三維仿真環境,本發明能對機器人在各種工作情況下的性能進行全面測試。這使得測試不僅限于理想條件或單一環境,而是能覆蓋更多實際工況,包括極端條件測試和意外情況處理;與傳統的現場測試相比,仿真測試不需要實物原型或生產環境,因此能顯著降低測試成本,此外,軟件仿真有助于縮短測試周期,加快迭代過程,從而提高產品開發的效率;通過在仿真環境中測試,可以在沒有任何安全風險的情況下測試機器人在各種危險或不可預測情況下的性能,這有助于在實際部署之前識別和消除潛在的安全隱患;本發明提供了快速且有效的驗證手段,工程師可以在虛擬環境中測試新方案,確保它們在實際應用之前能夠達到期望的性能標準;本發明中的評估算法可以持續指導工業機器人系統的優化,無論是軟件層面的控制程序調整,還是硬件設計的修改;通過設置不同的測試場景和環境變量,本發明能夠模擬真實世界的復雜度,從而保證機器人在各種環境下都能保持高性能;設計的腳本語言可以幫助標準化機器人的操作過程,這不僅減少了編程的復雜性,而且為機器人的性能評估提供了統一的框架。
技術特征:
1.一種基于工業機器人的仿真測試方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的一種基于工業機器人的仿真測試方法,其特征在于:所述步驟s1中創建工業機器人工作環境的三維仿真模型的具體步驟如下:
3.根據權利要求2所述的一種基于工業機器人的仿真測試方法,其特征在于:所述步驟s13中專業的三維建模軟件包括solidworks、autodesk?inventor或maya中一種。
4.根據權利要求1所述的一種基于工業機器人的仿真測試方法,其特征在于:所述步驟s6中設計評估算法,通過分析記錄步驟s5中的性能數據對機器人的工作性能進行評估,其評估包括以下內容:
技術總結
本發明涉及工業機器人相關領域,具體為一種基于工業機器人的仿真測試方法,本發明能夠在不同工作環境和條件下對機器人動作、程序和響應進行全面測試,快速發現潛在故障和性能瓶頸,以及驗證新的控制策略,從而降低測試成本,縮短測試周期,提高測試效率和可靠性。
技術研發人員:魏道新,汪洋,張錚,劉畋宏,張俊杰,彭敏林,衡超,張軍,徐亮,陳剛,單珊,韓荃
受保護的技術使用者:中船第九設計研究院工程有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!