一種慣性導航系統差動電流電壓轉換電路的制作方法
本發明涉及載頻調制轉換相關技術,尤其涉及一種慣性導航系統差動電流電壓轉換電路。
背景技術:
1、為實現慣性導航系統的微弱信號遠距離傳輸,目前多數慣性導航傳感器的信號輸出方式是電流型輸出。為方便將電流信號轉換為數字信號,常用的信號采集方式是進行i/f轉換或者i/v轉換,其中i/f轉換適用于高精度信號采集場合,而對于多數信號采集場合采用的是i/v的方式。
2、常規的i/v轉換通常是采用電流通過采樣電阻直接流入大地的方式,這種采樣方式存在輸入阻抗低、共模抑制能力差的特點。這種特性會要求前端傳感器必須要有較低的輸出阻抗,傳輸路徑需要非常干凈。但是在實際使用中,有些傳感器的內阻較高同時無直接接地端,且實際的功能應用環境共模干擾的抑制難以得到保障。上述現象對后續信號采集帶來了較大的困擾,增加了后端信號處理電路設計的難度,浪費了設計資源,增加了產品成本;并不適用于復雜的工程應用環境。
技術實現思路
1、本發明實施例提供一種慣性導航系統差動電流電壓轉換電路,通過調整信號輸入方式和信號變換電路,可實現高輸入阻抗和高共干擾模抑制的能力,大大降低信號采集電路的系統復雜度,而且實現了低輸出阻抗、無地信號傳感器電流差分放大處理,能夠更好的與后端采集電路相匹配。
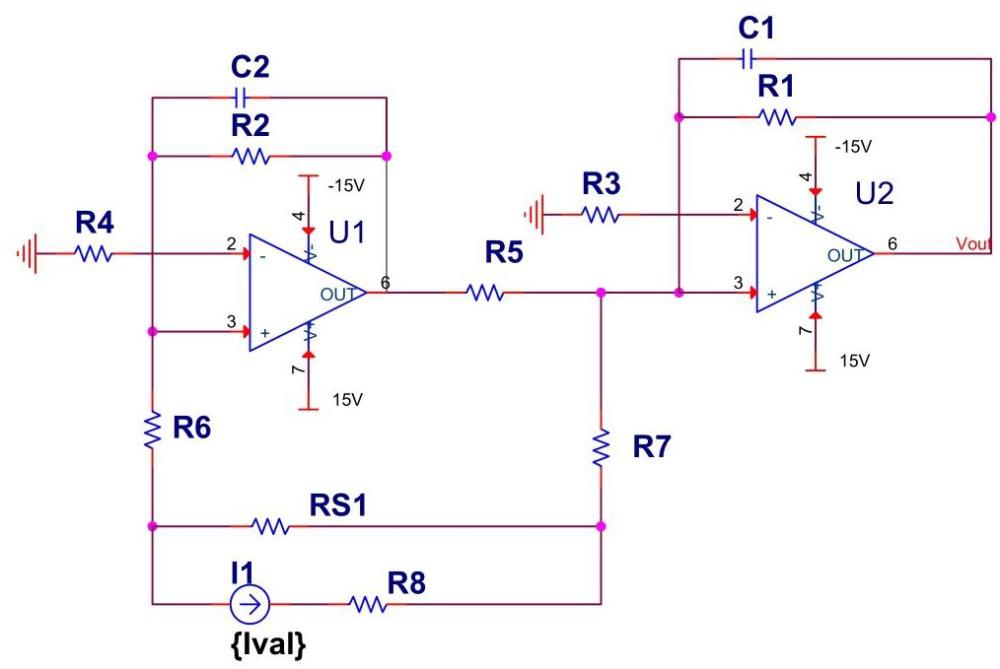
2、本發明提供一種慣性導航系統差動電流電壓轉換電路包括傳感器輸出電流i1、傳感器等效內阻r8、電流采樣電阻rs、相互串聯的第一反相放大器和第二反相放大器、位于所述第一反相放大器和所述第二反相放大器之間的電阻r5,所述第一反相放大器包括運算放大器u1、電阻r2、電阻r6和電容c2,所述第二反相放大器包括運算放大器u2、電阻r1、電阻r7和電容c1,所述第一反相放大器和所述第二反相放大器串聯電阻r5之后共同構成輸入信號i1*rs的差分放大器,通過調節rs的阻值實現對放大倍數的調節,通過調節r7和r6的阻值實現對輸入阻抗的調節。
3、可選的,傳感器輸出電流i1和傳感器等效內阻r8相互串聯之后與電流采樣電阻rs并聯,電流采樣電阻rs的兩端分別連接電阻r6和電阻r7。
4、可選的,運算放大器u1的正輸入端同時連接電阻r2、電阻r6和電容c2,電阻r2和電容c2的另一端同時連接運算放大器u1的輸出端,電阻r5的兩端分別連接運算放大器u1的輸出端和運算放大器u2的正輸入端。
5、可選的,運算放大器u2的正輸入端同時連接電阻r7、電阻r1和電容c1,電阻r1和電容c1的另一端同時連接運算放大器u2的輸出端。
6、可選的,運算放大器u1的負輸入端通過電阻r4接地,運算放大器u2的負輸入端通過電阻r3接地。
7、可選的,電阻r2和電阻r1的阻值相同,電阻r7和電阻r6的阻值相同,電阻r2的阻值大小是電阻r6的阻值大小的1.2倍~2倍。
8、可選的,電阻r2的阻值大小是電阻r6的阻值大小的1.5倍,電流采樣電阻rs的阻值為8?kω~15?kω。
9、可選的,所述慣性導航系統差動電流電壓轉換電路的傳感器輸入電流i1與輸出電壓vout的關系為vout=i1*rs*r2/r6。
10、可選的,傳感器輸出電流i1的范圍為8μa~100μa。
11、可選的,電阻r7和電阻r6的阻值大于1mω。
12、本發明的有益技術效果:
13、本發明提供的一種慣性導航系統差動電流電壓轉換電路包括傳感器輸出電流i1、傳感器等效內阻r8、電流采樣電阻rs、相互串聯的第一反相放大器和第二反相放大器、位于第一反相放大器和第二反相放大器之間的電阻r5,第一反相放大器包括運算放大器u1、電阻r2、電阻r6和電容c2,第二反相放大器包括運算放大器u2、電阻r1、電阻r7和電容c1,第一反相放大器和第二反相放大器串聯電阻r5之后共同構成輸入信號i1*rs的差分放大器,通過調節rs的阻值實現對放大倍數的調節,通過調節r7和r6的阻值實現對輸入阻抗的調節,通過調整信號輸入方式和信號變換電路實現了高輸入阻抗和高共干擾模抑制的能力,大大降低信號采集電路的系統復雜度,而且實現了低輸出阻抗、無地信號傳感器電流差分放大處理,能夠更好的與后端采集電路相匹配。
技術特征:
1.一種慣性導航系統差動電流電壓轉換電路,其特征在于,所述慣性導航系統差動電流電壓轉換電路包括傳感器輸出電流i1、傳感器等效內阻r8、電流采樣電阻rs、相互串聯的第一反相放大器和第二反相放大器、位于所述第一反相放大器和所述第二反相放大器之間的電阻r5,所述第一反相放大器包括運算放大器u1、電阻r2、電阻r6和電容c2,所述第二反相放大器包括運算放大器u2、電阻r1、電阻r7和電容c1,所述第一反相放大器和所述第二反相放大器串聯電阻r5之后共同構成輸入信號i1*rs的差分放大器,通過調節rs的阻值實現對放大倍數的調節,通過調節r7和r6的阻值實現對輸入阻抗的調節。
2.根據權利要求1所述的慣性導航系統差動電流電壓轉換電路,其特征在于,傳感器輸出電流i1和傳感器等效內阻r8相互串聯之后與電流采樣電阻rs并聯,電流采樣電阻rs的兩端分別連接電阻r6和電阻r7。
3.根據權利要求2所述的慣性導航系統差動電流電壓轉換電路,其特征在于,運算放大器u1的正輸入端同時連接電阻r2、電阻r6和電容c2,電阻r2和電容c2的另一端同時連接運算放大器u1的輸出端,電阻r5的兩端分別連接運算放大器u1的輸出端和運算放大器u2的正輸入端。
4.根據權利要求3所述的慣性導航系統差動電流電壓轉換電路,其特征在于,運算放大器u2的正輸入端同時連接電阻r7、電阻r1和電容c1,電阻r1和電容c1的另一端同時連接運算放大器u2的輸出端。
5.根據權利要求4所述的慣性導航系統差動電流電壓轉換電路,其特征在于,運算放大器u1的負輸入端通過電阻r4接地,運算放大器u2的負輸入端通過電阻r3接地。
6.根據權利要求4所述的慣性導航系統差動電流電壓轉換電路,其特征在于,電阻r2和電阻r1的阻值相同,電阻r7和電阻r6的阻值相同,電阻r2的阻值大小是電阻r6的阻值大小的1.2倍~2倍。
7.根據權利要求6所述的慣性導航系統差動電流電壓轉換電路,其特征在于,電阻r2的阻值大小是電阻r6的阻值大小的1.5倍,電流采樣電阻rs的阻值為8?kω~15?kω。
8.根據權利要求6所述的慣性導航系統差動電流電壓轉換電路,其特征在于,所述慣性導航系統差動電流電壓轉換電路的傳感器輸入電流i1與輸出電壓vout的關系為vout=i1*rs*r2/r6。
9.根據權利要求6所述的慣性導航系統差動電流電壓轉換電路,其特征在于,傳感器輸出電流i1的范圍為8μa~100μa。
10.根據權利要求6所述的慣性導航系統差動電流電壓轉換電路,其特征在于,電阻r7和電阻r6的阻值大于1mω。
技術總結
本發明提供一種慣性導航系統差動電流電壓轉換電路,屬于載波調制轉換相關技術領域,其包括傳感器輸出電流I1、傳感器等效內阻R8、電流采樣電阻Rs、相互串聯的第一反相放大器和第二反相放大器、位于第一反相放大器和第二反相放大器之間的電阻R5,第一反相放大器和第二反相放大器串聯電阻R5之后共同構成輸入信號I1*Rs的差分放大器,通過調節Rs的阻值實現對放大倍數的調節,通過調節R7和R6的阻值實現對輸入阻抗的調節,通過調整信號輸入方式和信號變換電路實現了高輸入阻抗和高共干擾模抑制的能力,大大降低信號采集電路的系統復雜度,而且實現了低輸出阻抗、無地信號傳感器電流差分放大處理,能夠更好的與后端采集電路相匹配。
技術研發人員:劉軍,丁長春,王沖,劉欣,崔久鵬,王曉偉,程金晶
受保護的技術使用者:青島智騰微電子有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!