一種基于DVL信息的水下機器人動態定高控制方法
本發明涉及水下機器人控制,具體涉及一種基于dvl信息的水下機器人動態定高控制方法。
背景技術:
1、水下機器人在海洋資源勘探、海洋科學研究、海洋工程等領域有著廣泛的應用,在許多任務中,水下機器人需要在接近海底的位置進行觀測或作業,這就要求水下機器人具備高精度的定高航行能力。
2、傳統的水下機器人定高方法主要依賴于聲吶或壓力傳感器;聲吶測距雖然可以直接測量與海底的距離,但受到聲波傳播速度和海水環境的影響,精度有限。壓力傳感器雖然可以準確測量水深,但無法直接反映與海底的相對距離,特別是在海底地形復雜的情況下。
3、多普勒速度儀(dvl)是一種利用多普勒效應測量水下機器人相對于海底或水體的速度的設備。dvl通常包含多個聲波波束,可以同時測量多個方向的速度和距離信息。
4、然而,目前大多數利用dvl的水下機器人導航方法主要關注位置估計和航跡規劃,對于在復雜海底地形下實現高精度定高航行的研究還較少,特別是在海底地形起伏較大的情況下,如何利用dvl提供的信息來預測前方地形,并據此調整水下機器人的姿態,實現安全、高效的定高航行,仍是一個有待解決的問題。
5、因此,需要一種能夠充分利用dvl提供的信息,實現水下機器人高精度、高安全定高航行的方法,以提升水下機器人在復雜海底環境中的作業能力。
技術實現思路
1、本發明的目的是提供一種基于dvl信息的水下機器人動態定高控制方法,以解決現有技術中存在的問題。
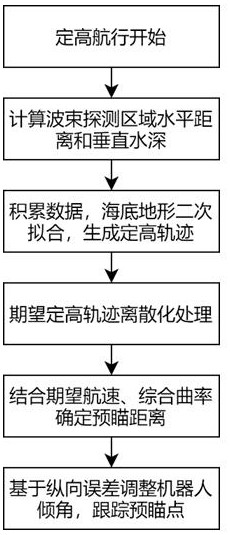
2、本發明方法包括以下步驟:
3、a)?根據dvl兩個前向波束實時信息及水下機器人實時傾角信息,估計波束探測區域的水平距離和垂向水深;
4、b)?采用二次多項式擬合前行區域的歷史水平距離和垂向水深,并結合期望定高高度生成定高軌跡;
5、c)?對擬合后的定高軌跡進行離散化處理;
6、d)?結合期望航速、綜合曲率確定預瞄距離,并通過移動平均方式平滑調整預瞄距離;
7、e)?采用縱向誤差的預瞄控制策略,實時調整水下機器人的傾角,實現精確定高路徑跟蹤。
8、本發明的有益效果是:
9、利用dvl提供的實時和歷史信息,能夠有效估計前方海底地形,提高水下機器人對復雜地形的適應能力;
10、結合綜合曲率和期望航速動態調整預瞄距離,增強了系統的魯棒性;
11、通過預瞄點的設置,實現了對前方地形的提前響應,提高了定高航行的安全性和平穩性;
12、結合當前位置與預瞄點之間的縱向誤差調整水下機器人傾角,實現了對定高目標的精確跟蹤。
技術特征:
1.一種基于dvl信息的水下機器人動態定高控制方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的方法,其特征在于,步驟a)中估計波束探測區域的水平距離和垂向水深具體是:
3.根據權利要求1所述的方法,其特征在于,步驟b)中二次多項式擬合方法采用最小二乘法。
4.根據權利要求1至3中任一項所述的方法,其特征在于,步驟c)具體是:將連續的軌跡函數在等間隔的水平距離點上采樣,得到離散的軌跡點集。
5.根據權利要求4所述的方法,其特征在于,步驟d)中所述綜合曲率通過離散化后計算前幾個路徑點的曲率的加權平均值來確定。
6.根據權利要求5所述的方法,其特征在于,步驟d)中所述預瞄距離計算如下:
7.根據權利要求1所述的方法,其特征在于,所述步驟e)中所述預瞄控制策略具體是:
8.根據權利要求7所述的方法,其特征在于,所述根據預瞄距離確定的預瞄點具體是:
9.根據權利要求7所述的方法,其特征在于,所述路徑切線方向由切線方向角描述,其中切線方向角為預瞄點在當前位置的切線方向相對于水平軸的夾角。
10.根據權利要求7所述的方法,其特征在于,所述縱向誤差計算如下:
技術總結
本發明提出了一種基于DVL信息的水下機器人動態定高控制方法,屬于水下機器人控制技術領域,所述方法包括:根據DVL兩個前向波束實時信息及水下機器人實時傾角信息估計波束探測區域水平距離、垂向水深;采用二次多項式擬合前行區域歷史水平距離、垂向水深,并結合期望定高高度生成定高軌跡;對擬合后的軌跡進行離散化處理,并結合期望航速與綜合曲率確定預瞄距離,同時通過移動平均方式平滑調整預瞄距離;根據預瞄點位置及當前位置的縱向誤差計算水下機器人的期望俯仰角,實時調整水下機器人的傾角,實現精確定高路徑跟蹤。通過實施本發明實施例的方法可控制水下機器人高精度、高安全地跟蹤海底起伏航行,以提升其近海底定高觀測能力。
技術研發人員:周善旻,劉碩,張宇,李景陽,姜凱友,馬佳杰,林王林,孫智勇,蔡勇,夏添,張兵兵
受保護的技術使用者:浙江大學舟山海洋研究中心
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!