基于視覺與路徑規劃的四足機器人擺動腿避障方法與流程
本發明涉及四足機器人路徑規劃領域,尤其涉及一種基于視覺與路徑規劃的四足機器人擺動腿避障方法。
背景技術:
1、機器人路徑規劃是機器人研究領域的一個重要的基本問題,機器人路徑規劃旨在為機器人找到一條從起點到終點的路徑,并能夠安全避開運動空間中的所有障礙物。根據機器人對其工作環境內信息的理解程度,機器人路徑規劃大致分兩種類型,即基于局部環境信息理解的路徑規劃(又稱局部路徑規劃)和基于全局環境信息理解的路徑規劃(又稱全局路徑規劃),前者是機器人通過實時融合自身各種傳感器獲取的信息,提取理解的有效局部環境特征,在線實時規劃局部路徑,具有很高的靈活性和實時性,其缺點是依靠局部環境特征規劃的路徑可能是局部最優,甚至是目標不可達路徑;而后者需要移動機器人根據理解所在環境的全局信息特征,建立所在環境映像的抽象的全局地圖模型,在構建的全局地圖模型上使用搜索尋優算法獲取全局最優路徑或較優路徑,并能引導機器人在實際環境向目標安全移動,其主要涉及兩部分內容:環境地圖理解及構建和路徑搜索引導策略。當預先具備完整精確的環境信息時,全局規劃算法可以一次性規劃出一條自起點到終點的完整的路徑規劃,但是若在機器人行徑過程中遇到突發的威脅,全局路徑規劃算法的路徑就無法滿足避開威脅的要求,必須結合局部路徑規劃算法生成實時規避路徑。
2、目前主流的移動機器人可以分為輪式、履帶式與足式三種。其中,足式機器人在復雜崎嶇的地形上通過性能是最好的,遠強于輪式與履帶式機器人。在足式機器人中,從能效值(cot,cost?of?transport)來看,四足機器人的效率遠遠高于其他多足機器人,因此,四足機器人具有極高的研究價值和商業價值。近些年來,由于機器視覺以及相機硬件技術的發展,搭載了rgb-d相機的四足機器人可以獲得精度較高的高度圖信息,但是目前大部分的四足機器人產品僅將這些視覺信息用來規劃落腳點的高度和位置,而對于擺動腿軌跡依舊使用的是固定軌跡或者簡單的樣條插值。
3、由于足式機器人的控制需要較高的控制頻率(大于500hz),為了盡量縮短控制周期而使用固定軌跡。當四足機器人擺動腿軌跡采用固定軌跡,如貝塞爾曲線,或者簡單的使用固定的路徑點進行三次樣條插值時,當機器人通過相機發現擺動腿前出現障礙物時,只能通過抬高擺動腿的高度或者改變落腳點的方式進行避障。但是,經常通過抬高擺動腿的高度避障,將會造成很多不必要的能量消耗,通過改變落腳點的方式避障,將可能會使支撐腳構成的支撐平面的面積減小,降低整個機器人系統的穩定性。同時,使用固定擺腿軌跡無法做到擺動腿的動態避障。在大多數情況下,足式機器人通過全局路徑規劃以及局部路徑規劃進行整體避障,而目前這些足式機器人忽略了擺動腿軌跡規劃。
4、因此,亟需一種四足機器人擺動腿避障方法,其能有效地避障時的能耗,提高機器人避障時的穩定性,且能實現動態避障。
技術實現思路
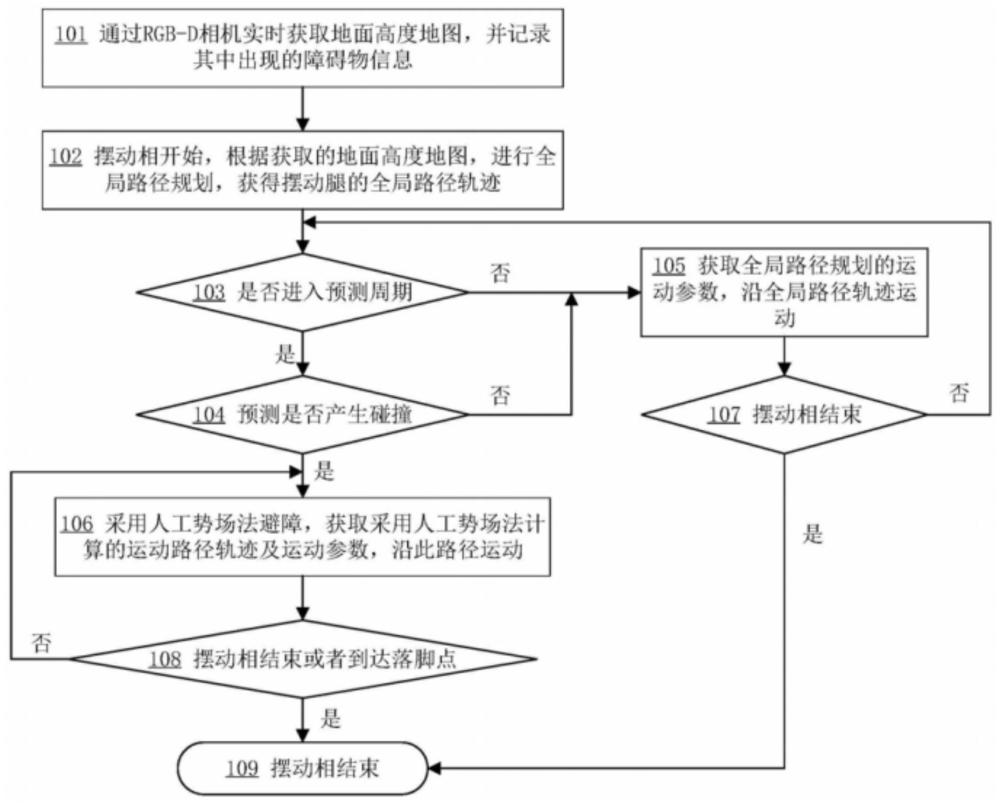
1、為了解決上述技術問題,本發明提供一種基于視覺與路徑規劃的四足機器人擺動腿避障方法,其特征在于,包含以下步驟:(1)通過rgb-d相機實時獲取地面高度地圖,并記錄其中出現的障礙物信息;(2)擺動相開始,根據獲取的地面高度地圖,進行全局路徑規劃,獲得擺動腿的全局路徑軌跡;(3)判斷是否進入預測周期,若進入預測周期,則執行步驟(4);若沒有進入預測周期,則執行步驟(5);(4)預測是否發生碰撞,若預測發生碰撞,則執行步驟(6);若預測不發生碰撞,則執行步驟(5);(5)獲取全局路徑規劃的運動參數,沿全局路徑軌跡運動,并執行步驟(7);(6)采用人工勢場法避障,獲取采用人工勢場法計算的運動路徑軌跡及運動參數,沿此路徑運動,并執行步驟(8);(7)判斷擺動相是否結束,若擺動相尚未結束,返回步驟(3);若擺動相結束,執行步驟(9);(8)判斷擺動相是否結束或者到達落腳點,若擺動相尚未結束且尚未達到落腳點,則返回步驟(6);若擺動相已經結束或者到達落腳點,則執行步驟(9);(9)擺動相結束。
2、采用本發明中提供的基于視覺與路徑規劃的四足機器人擺動腿避障方法,具有如下優點:(1)本發明基于rgb-d相機的視覺信息,使用全局路徑規劃軌跡生成方法并結合動態路徑規劃的方法,提供一種能在四足機器人運動過程中,動態調整擺動腿軌跡的方法,大大增強了四足機器人在復雜地形下的通行能力;(2)在本發明中提供的四足機器人擺動腿避障方法,是對擺動腿進行路徑規劃。在擺動相每次抬腳前,都會進行一次路徑規劃,避免某一擺動腿被障礙物卡住的情況;(3)在本發明提供的四足機器人擺動腿避障方法,能躲避在空間內突然出現的移動障礙物,本發明中,在擺動相的預測周期內,會結合最新獲取的地面高度地圖,檢測是否有動態移動障礙物出現,預測擺動腿是否會與障礙物發生碰撞,并且如果預測會發生碰撞時,使用人工勢場法躲避動態障礙物。
3、優選地,在步驟(2)中進行全局路徑規劃時,以當前擺動腿的位置為起點,通過啟發式算法得到的啟發式落腳點為終點,獲得擺動腿的全局路徑軌跡。
4、優選地,在進行全局路徑規劃時,根據獲得的全局路徑路徑點和預設的抬腳高度,進行樣條插值,獲得擺動腿的全局路徑軌跡。
5、優選地,在步驟(2)中進行全局路徑規劃時,采用以下方法其中之一:拓撲法、可視圖法、柵格法、a*算法和rrt路徑規劃算法。
6、優選地,在對預測周期進行選取時,根據地面高度地圖的更新頻率和控制算法的控制周期進行選取。
7、優選地,在步驟(4)中預測是否發生碰撞時,通過擺動腿的足端位置反求擺動腿的關節值并檢查擺動腿的每一條腿關節是否會與障礙物發生碰撞。
8、優選地,所述全局路徑規劃的運動參數包括位置、速度和加速度。
9、優選地,所述采用人工勢場法計算的運動參數包括位置、速度和加速度。
技術特征:
1.一種基于視覺與路徑規劃的四足機器人擺動腿避障方法,其特征在于,包含以下步驟:
2.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,所述采用人工勢場法計算的運動參數包括位置、速度和加速度。
3.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,所述方法還包括:
4.根據權利要求1至3中任一項所述的四足機器人擺動腿避障方法,其特征在于,所述人工勢場法的總勢場由引力場與斥力場組成:
5.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,在進行全局路徑規劃時,以當前擺動腿的位置為起點,通過啟發式算法得到的啟發式落腳點為終點,獲得擺動腿的全局路徑軌跡。
6.根據權利要求5中所述的四足機器人擺動腿避障方法,其特征在于,在進行全局路徑規劃時,根據獲得的全局路徑路徑點和預設的抬腳高度,進行樣條插值,獲得擺動腿的全局路徑軌跡。
7.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,所述方法還包括:
8.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,所述方法還包括:
9.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,在進行全局路徑規劃時,采用以下方法其中之一:拓撲法、可視圖法、柵格法、a*算法和rrt路徑規劃算法。
10.根據權利要求1中所述的四足機器人擺動腿避障方法,其特征在于,在預測是否發生碰撞時,通過擺動腿的足端位置反求擺動腿的關節值并檢查擺動腿的每一條腿關節是否會與障礙物發生碰撞。
技術總結
本發明提供一種基于視覺與路徑規劃的四足機器人擺動腿避障方法,其基于視覺信息對擺動腿進行路徑規劃,并且在運動過程中,設置預測周期實時對擺動腿進行預測,避免碰上障礙物。本發明提供的四足機器人擺動腿避障方法,提供中能在四足機器人運動過程中,動態調整擺動腿軌跡的方法,大大增強了四足機器人在復雜地形下的通行能力;且該避障方法,是對擺動腿進行路徑規劃,在擺動相每次抬腳前,都會進行一次路徑規劃,避免某一擺動腿被障礙物卡住的情況;除此之外,該避障方法能躲避在空間內突然出現的移動障礙物。
技術研發人員:請求不公布姓名
受保護的技術使用者:南京蔚藍智能科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!