一種基于單片機的智能車門控制系統
本發明屬于車門控制系統領域,具體地說,涉及一種基于單片機的智能車門控制系統。
背景技術:
1、隨著汽車智能化技術的快速發展,車輛的安全性和用戶體驗成為消費者和制造商關注的焦點。傳統的車門控制系統通常依賴于簡單的機械和電氣開關操作,無法應對復雜的使用場景和環境變化。近年來,智能車門控制系統逐漸成為一種趨勢,通過集成多種傳感器和控制模塊,實現自動化、智能化的車門開啟和關閉操作。這種系統不僅能夠提高車主的便捷性,還能在各種天氣條件下提供可靠的操作保障,并有效避免車門開啟過程中的碰撞風險。
2、現有系統在處理車主接近車輛、天氣變化以及周圍環境監測等方面,往往無法做到實時響應。主控制模塊和備用控制模塊的缺乏,使得系統在主控模塊失效時無法及時接管控制,導致系統運行不穩定。傳統系統在處理車門開啟過程中的安全問題上存在不足,尤其是在復雜的環境下,無法有效避免車門與障礙物的碰撞。現有技術的防碰撞功能有限,天氣感知能力弱,難以適應多變的環境條件。
3、有鑒于此特提出本發明。
技術實現思路
1、本發明要解決的技術問題在于克服現有技術的不足,提供一種基于單片機的智能車門控制系統,解決了上述背景技術中提出的問題。
2、為解決上述技術問題,本發明采用技術方案的基本構思是:
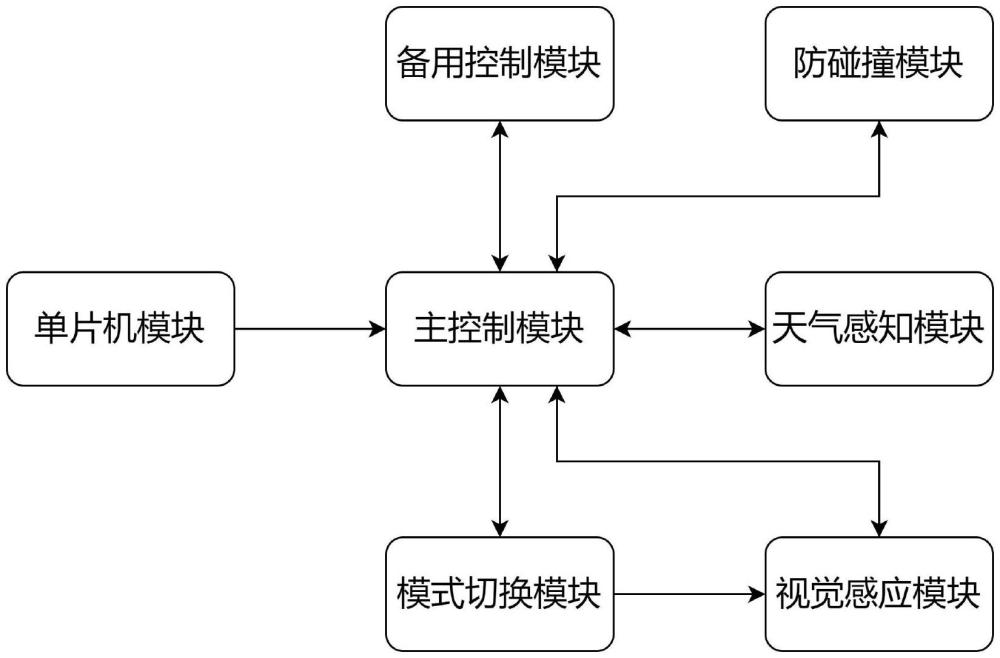
3、一種基于單片機的智能車門控制系統,包括:單片機模塊,單片機模塊用于集成各個模塊;
4、主控制模塊,主控制模塊用于管理各個模塊的協調工作,處理車門的開啟和關閉命令;
5、備用控制模塊,備用控制模塊通過心跳檢測實時獲取控制模塊的信號,若檢測到主控制模塊失效時,自動接管系統控制,并將內部儲存系統傳輸到主控制模塊;
6、模式切換模塊,模式切換模塊用于在不同操作模式之間切換;
7、天氣感知模塊,天氣感知模塊用于通過傳感器感知當前天氣狀況,并將數據上傳到主控制模塊中對控制車門開啟的大小;
8、防碰撞模塊,防碰撞模塊用于通過傳感器檢測周圍環境和障礙物,預測碰撞風險;
9、視覺感應模塊,視覺感應模塊用于感應獲取車主距車的距離及其前進速度,并根據得到的距離計算出車門開啟的效率。
10、可選的,主控制模塊分配任務的步驟為:
11、主控制模塊初始使用輪詢調度算法,將任務按順序分配給每個模塊并實時監控各個模塊的負載情況,負載情況包括cpu使用率、內存使用情況和任務處理時間等,獲取當前負載數據,并根據獲取的負載監控數據,評估當前各模塊的負載水平,負載均衡器組件根據預設的負載閾值,動態調整任務分配策略,當某一模塊發生故障時,主控制模塊能夠立即檢測到故障狀態,并指示其他模塊迅速接管故障模塊的任務。
12、可選的,天氣感知模塊用于通過傳感器感知當前天氣狀況,并將數據上傳到主控制模塊中對控制車門開啟的大小的步驟為:
13、使用感知天氣狀況的傳感器,并在系統啟動時,初始化所有天氣傳感器,使其進入工作狀態;
14、主控制模塊接收來自天氣感知模塊的天氣數據,根據接收到的數據判斷當前的天氣狀況執行以下控制策略,控制策略包括晴天正常開啟車門,雨天根據降雨量調整車門開啟的角度,風天根據風速調整車門開啟的角度。
15、可選的,備用控制模塊通過心跳檢測未收到主控制模塊的信號,確認主控制模塊發生故障時執行以下步驟:
16、鎖定當前系統狀態,并獲取未完成任務的信息,而后從鎖定狀態信息中恢復未完成任務,并繼續執行;
17、在調度過程中,備用控制模塊將自身數據輸入到主控制模塊的存儲區域中,以對損失的系統文件進行修復;
18、向其他所有子模塊廣播主控制模塊故障的信息,通知它們現在由備用控制模塊接管任務調度和管理,其他模塊收到通知后,開始將負載和狀態信息定期反饋給備用控制模塊
19、備用控制模塊記錄主控制模塊的故障事件,故障事件包括故障發生時間、故障類型、處理步驟和當前系統狀態信息,為后續故障排查和系統改進提供依據;
20、在主控制模塊修復后,備用控制模塊與主控制模塊進行數據同步,將控制權移交回主控制模塊。
21、可選的,模式切換模塊切換的模式包括但不限于自動模式、手動模式、緊急模式。
22、可選的,感應獲取車主距車的距離及其前進速度,并根據得到的距離計算出車門開啟的效率的步驟為:
23、視覺感應模塊定時發射信號,并接收反射信號,通過公式計算車主與車門的距離d(t);
24、通過連續的距離測量,計算單位時間內距離的變化量,并通過公式計算得到車主的前進速度,根據車主距離d(t)和前進速度v(t),計算車門開啟的效率,其表達式為:其中,d(t)為時間t時刻車主與車門的距離,v(t)為時間t時刻車主的前進速度,δt為連續兩次測量的時間間隔,e(t)為時間t時刻車門的開啟效率,θ(t)為時間t時刻車門的開啟角度,ω(t)為時間t時刻車門的開啟速度。
25、可選的,根據實時采集的數據,通過公式和動態調整車門的開啟速度θ(t)和角度ω(t),以調整車門開啟效率,確保車主能夠順利進入車輛,其中,ωmax為車門最大開啟速度,vth為速度閾值。
26、可選的,視覺感應模塊、天氣感知模塊、防碰撞模塊依照優先級順序排列,其中,防碰撞模塊的優先級大于視覺感應模塊、天氣感知模塊的優先級的,在執行開門操作的時候優先執行防碰撞模塊的控制策略。
27、可選的,防碰撞模塊用于通過傳感器檢測周圍環境和障礙物,預測碰撞風險的步驟為:
28、防碰撞模塊通過傳感器實時檢測車門周圍的障礙物,對采集到的環境數據進行處理,識別障礙物的位置和速度;
29、根據障礙物的位置和速度,預測碰撞風險,根據車門開啟角度、速度和障礙物信息,評估碰撞風險,其表達式為:其中,tp(t)為時間t時刻預測的碰撞時間,rp(t)為時間t時刻碰撞風險系數。
30、采用上述技術方案后,本發明與現有技術相比具有以下有益效果,當然,實施本發明的任一產品并不一定需要同時達到以下所述的所有優點:
31、通過模塊化結構,單片機模塊能夠集成并協調各個子模塊的工作,使整個系統具有高度的集成性和靈活性。主控制模塊管理各個子模塊的協調工作,處理車門的開啟和關閉命令,確保系統的正常運行。備用控制模塊通過心跳檢測實時獲取控制模塊的信號,在主控制模塊失效時,自動接管系統控制,并將內部儲存系統傳輸到主控制模塊,保證系統的穩定性和可靠性。
32、下面結合附圖對本發明的具體實施方式作進一步詳細的描述。
技術特征:
1.一種基于單片機的智能車門控制系統,其特征在于,包括:
2.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,主控制模塊分配任務的步驟為:
3.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,天氣感知模塊用于通過傳感器感知當前天氣狀況,并將數據上傳到主控制模塊中對控制車門開啟的大小的步驟為:
4.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,備用控制模塊通過心跳檢測未收到主控制模塊的信號,確認主控制模塊發生故障時執行以下步驟:
5.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,模式切換模塊切換的模式包括但不限于自動模式、手動模式、緊急模式。
6.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,感應獲取車主距車的距離及其前進速度,并根據得到的距離計算出車門開啟的效率的步驟為:
7.根據權利要求6所述的一種基于單片機的智能車門控制系統,其特征在于,根據實時采集的數據,通過公式和動態調整車門的開啟速度θ(t)和角度ω(t),以調整車門開啟效率,確保車主能夠順利進入車輛,其中,ωmax為車門最大開啟速度,vth為速度閾值。
8.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,視覺感應模塊、天氣感知模塊、防碰撞模塊依照優先級順序排列,其中,防碰撞模塊的優先級大于視覺感應模塊、天氣感知模塊的優先級的,在執行開門操作的時候優先執行防碰撞模塊的控制策略。
9.根據權利要求1所述的一種基于單片機的智能車門控制系統,其特征在于,防碰撞模塊用于通過傳感器檢測周圍環境和障礙物,預測碰撞風險的步驟為:
技術總結
本發明公開了一種基于單片機的智能車門控制系統,涉及車門控制系統技術領域。本發明包括單片機模塊,單片機模塊用于集成各個模塊;主控制模塊,主控制模塊用于管理各個模塊的協調工作,處理車門的開啟和關閉命令;備用控制模塊,備用控制模塊通過心跳檢測實時獲取控制模塊的信號。本發明通過模塊化結構,單片機模塊能夠集成并協調各個子模塊的工作,使整個系統具有高度的集成性和靈活性。主控制模塊管理各個子模塊的協調工作,處理車門的開啟和關閉命令,確保系統的正常運行。備用控制模塊通過心跳檢測實時獲取控制模塊的信號,在主控制模塊失效時,自動接管系統控制,并將內部儲存系統傳輸到主控制模塊,保證系統的穩定性和可靠性。
技術研發人員:吳國文
受保護的技術使用者:廣州科技職業技術大學
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!