機器人控制方法、裝置、計算機設備和可讀存儲介質與流程
本申請涉及機器人,特別是涉及一種機器人控制方法、裝置、計算機設備、計算機可讀存儲介質和計算機程序產品。
背景技術:
1、在機器人技術領域中,涉及在同一場景下協同運行的不同類型的機器人,當不同類型的機器人對應的移動路徑發生沖突時,則會出現堵塞問題,需要對機器人進行調度處理。
2、目前的對機器人進行調度的方法中,僅根據通信數據或路況感知數據對機器人進行調度,而難以應對死鎖問題等復雜場景,從而降低了機器人調度的高效性和準確性;而另一種對機器人進行調度的方法中,需要對各個類型的機器人、以及接入機器人的中控系統的控制邏輯進行大幅度的變更,以應對死鎖問題等復雜場景,從而提高了機器人調度的工作復雜性、以及降低了機器人調度的高效性。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種能夠提高機器人調度效率、以及降低機器人調度工作復雜性的機器人控制方法、裝置、計算機設備、計算機可讀存儲介質和計算機程序產品。
2、第一方面,本申請提供了一種機器人控制方法,包括:
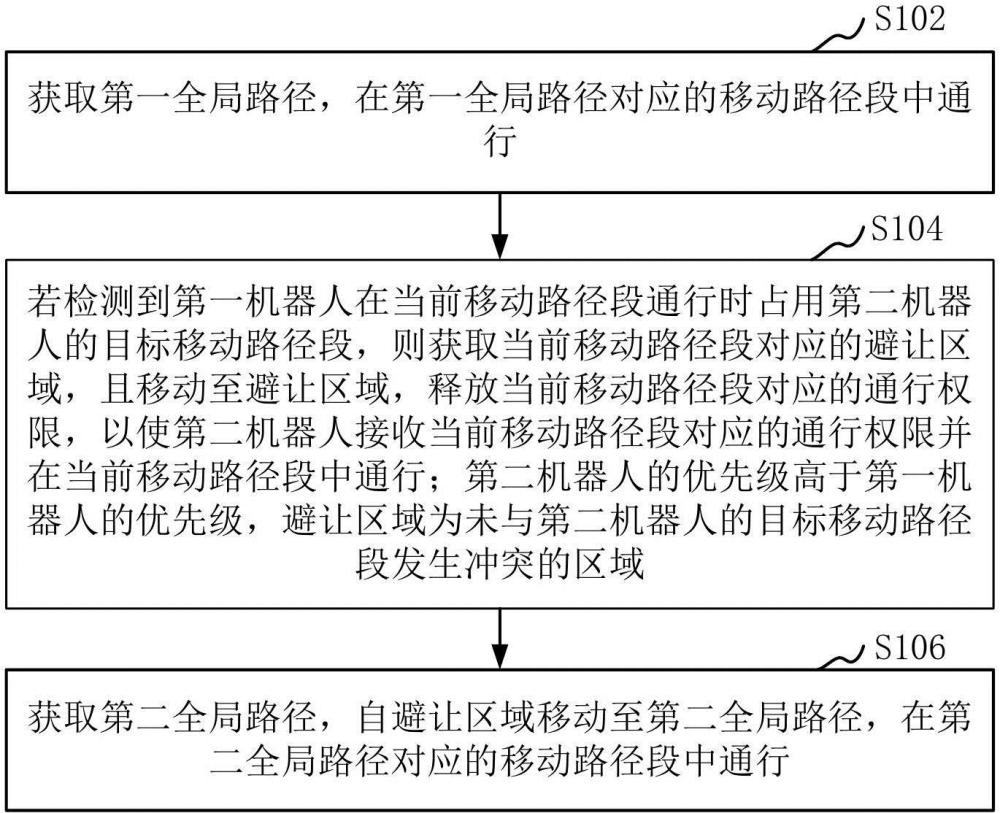
3、獲取第一全局路徑,在所述第一全局路徑對應的移動路徑段中通行;
4、若檢測到所述第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則獲取所述當前移動路徑段對應的避讓區域,且移動至所述避讓區域,釋放所述當前移動路徑段對應的通行權限,以使所述第二機器人接收所述當前移動路徑段對應的通行權限并在所述當前移動路徑段中通行;所述第二機器人的優先級高于所述第一機器人的優先級,所述避讓區域為未與所述第二機器人的目標移動路徑段發生沖突的區域;
5、獲取第二全局路徑,自所述避讓區域移動至所述第二全局路徑,在所述第二全局路徑對應的移動路徑段中通行。
6、第二方面,本申請還提供了一種機器人控制方法,包括:
7、在第一機器人通行第一全局路徑對應的移動路徑段時,若檢測到所述第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則將避讓請求發送至所述第一機器人,以使得所述第一機器人獲取所述當前移動路徑段對應的避讓區域,且移動至所述避讓區域,釋放所述當前移動路徑段對應的通行權限;所述第二機器人的優先級高于所述第一機器人的優先級,所述避讓區域為未與所述第二機器人的目標移動路徑段發生沖突的區域;
8、將所述當前移動路徑段對應的通行權限發送至所述第二機器人,以使得所述第二機器人接收所述當前移動路徑段對應的通行權限并在所述當前移動路徑段中通行;
9、在所述第二機器人通行所述當前移動路徑段之后,接收來自所述第一機器人的通行請求,將所述通行請求對應的通行權限發送至所述第一機器人,以使得所述第一機器人在第二全局路徑對應的移動路徑段中通行。
10、第三方面,本申請還提供了一種機器人控制裝置,包括:
11、第一獲取模塊,用于獲取第一全局路徑,在所述第一全局路徑對應的移動路徑段中通行;
12、避讓模塊,用于若檢測到所述第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則獲取所述當前移動路徑段對應的避讓區域,且移動至所述避讓區域,釋放所述當前移動路徑段對應的通行權限,以使所述第二機器人接收所述當前移動路徑段對應的通行權限并在所述當前移動路徑段中通行;所述第二機器人的優先級高于所述第一機器人的優先級,所述避讓區域為未與所述第二機器人的目標移動路徑段發生沖突的區域;
13、第二獲取模塊,用于獲取第二全局路徑,自所述避讓區域移動至所述第二全局路徑,在所述第二全局路徑對應的移動路徑段中通行。
14、第四方面,本申請還提供了一種機器人控制裝置,包括:
15、第一發送模塊,用于在第一機器人通行第一全局路徑對應的移動路徑段時,若檢測到所述第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則將避讓請求發送至所述第一機器人,以使得所述第一機器人獲取所述當前移動路徑段對應的避讓區域,且移動至所述避讓區域,釋放所述當前移動路徑段對應的通行權限;所述第二機器人的優先級高于所述第一機器人的優先級,所述避讓區域為未與所述第二機器人的目標移動路徑段發生沖突的區域;
16、第二發送模塊,用于將所述當前移動路徑段對應的通行權限發送至所述第二機器人,以使得所述第二機器人接收所述當前移動路徑段對應的通行權限并在所述當前移動路徑段中通行;
17、第三發送模塊,用于在所述第二機器人通行所述當前移動路徑段之后,接收來自所述第一機器人的通行請求,將所述通行請求對應的通行權限發送至所述第一機器人,以使得所述第一機器人在第二全局路徑對應的移動路徑段中通行。
18、第五方面,本申請還提供了一種計算機設備,包括存儲器和處理器,所述存儲器存儲有計算機程序,所述處理器執行所述計算機程序時實現以上步驟。
19、第六方面,本申請還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現以上步驟。
20、第七方面,本申請還提供了一種計算機程序產品,包括計算機程序,該計算機程序被處理器執行時實現以上步驟。
21、上述機器人控制方法、裝置、計算機設備、計算機可讀存儲介質和計算機程序產品,第一機器人在原有的全局路徑對應的移動路徑段中通行時,若檢測到第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則移動至當前移動路徑段對應的避讓區域,以使高優先級的第二機器人在當前移動路徑段中通行,再者,第一機器人在避讓區域獲取更新后的全局路徑,以自避讓區域移動至更新后的全局路徑對應的移動路徑段中通行;基于此,不同類型的機器人在移動過程中發生沖突時,僅需通過低優先級的機器人對高優先級的機器人進行避讓,并對低優先級的機器人重新生成新的全局路徑,從而在減小對機器人和服務器的控制邏輯的改動幅度、以及降低機器人調度的工作復雜性的情況下,提高了機器人調度的高效性和適應性,以及提高了整體的運行效率,避免資源發生沖突。
技術特征:
1.一種機器人控制方法,其特征在于,應用于第一機器人,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述第一全局路徑對應的移動路徑段包括第一移動路徑段,所述在所述第一全局路徑對應的移動路徑段中通行,包括:
3.根據權利要求1所述的方法,其特征在于,所述獲取第一全局路徑,包括:
4.根據權利要求1所述的方法,其特征在于,所述若檢測到所述第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則獲取所述當前移動路徑段對應的避讓區域之前,還包括以下三種步驟中的其中一種:
5.根據權利要求1所述的方法,其特征在于,所述第一全局路徑對應的移動路徑段包括第二移動路徑段和第三移動路徑段,所述在所述第一全局路徑對應的移動路徑段中通行,包括:
6.根據權利要求1所述的方法,其特征在于,所述獲取第一全局路徑之后,還包括:
7.根據權利要求1所述的方法,其特征在于,應用于服務器,所述方法還包括:
8.一種機器人控制裝置,其特征在于,所述裝置包括:
9.一種機器人控制裝置,其特征在于,所述裝置包括:
10.一種計算機設備,包括存儲器和處理器,所述存儲器存儲有計算機程序,其特征在于,所述處理器執行所述計算機程序時實現權利要求1至7中任一項所述的方法的步驟。
技術總結
本申請涉及一種機器人控制方法、裝置、計算機設備、計算機可讀存儲介質和計算機程序產品。所述方法包括:第一機器人獲取第一全局路徑,在第一全局路徑對應的移動路徑段中通行;若檢測到第一機器人在當前移動路徑段通行時占用第二機器人的目標移動路徑段,則第一機器人獲取當前移動路徑段對應的避讓區域,且移動至避讓區域,釋放當前移動路徑段對應的通行權限,以使第二機器人接收當前移動路徑段對應的通行權限并在當前移動路徑段中通行;第一機器人獲取第二全局路徑,自避讓區域移動至第二全局路徑,在第二全局路徑對應的移動路徑段中通行。采用本方法能夠提高機器人調度的高效性和適應性。
技術研發人員:陳經緯,商成思,陳文俊,何科君
受保護的技術使用者:深圳市普渡科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!