基于機器人的可視化巡檢系統和方法與流程
本申請涉及機器人,特別涉及一種基于機器人的可視化巡檢系統和方法。
背景技術:
1、隨著工業自動化和智能化的發展,巡檢工作的重要性日益凸顯。傳統巡檢方式主要依賴人工,需要大量時間和人力成本,巡檢人員需要逐一檢查各個設備或設施,效率較低,人為因素是導致巡檢錯誤的主要原因之一。并且巡檢人員可能因為疲勞、疏忽或專業知識不足等原因,未能準確識別設備故障或安全隱患,普通巡檢通常無法實時獲取巡檢數據,無法及時反饋現場情況,這使得故障排查和處理過程變得更為繁瑣和耗時,普通巡檢很難實現24小時不間斷的監控和巡檢,在無人值守的情況下,可能存在安全隱患無法及時發現的風險,亟待解決。
技術實現思路
1、本申請提供一種基于機器人的可視化巡檢系統和方法,以解決傳統巡檢方式主要依賴人工,不僅效率低下,而且巡檢質量不穩定等問題。
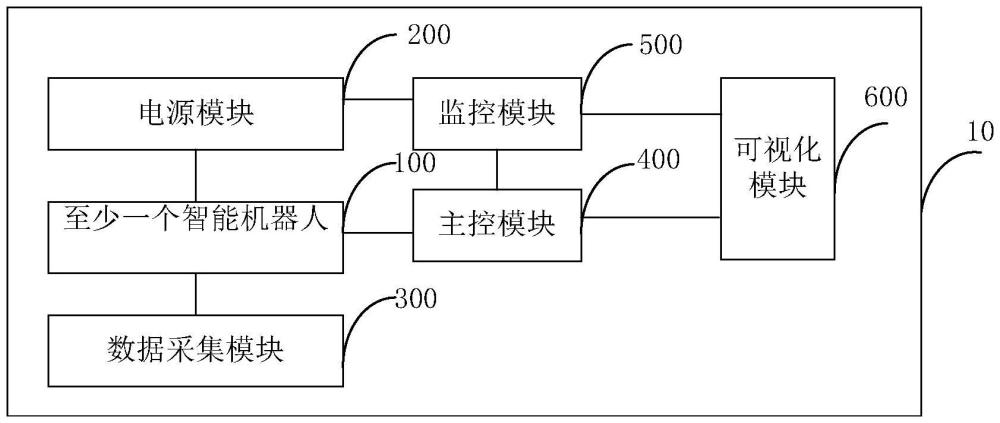
2、本申請第一方面實施例提供一種基于機器人的可視化巡檢系統,包括:至少一個智能機器人;與所述至少一個智能機器人連接的電源模塊;設置于所述至少一個智能機器人目標位置處的數據采集模塊,用于實時采集智能機器人在巡檢過程中的巡檢環境數據;設置與所述至少一個智能機器人目標位置處的主控模塊,用于根據遠程控制指令或自動生成指令控制至少一個智能機器人執行在線或離線可視化巡檢任務。
3、可選地,上述的基于機器人的可視化巡檢系統,還包括:上位機,所述上位機分別與監控模塊和主控模塊相連,用于根據事先設定好的所述巡檢任務和巡檢路線下發控制指令至所述主控模塊。
4、可選地,上述的基于機器人的可視化巡檢系統,還包括:監控模塊,所述監控模塊與至少一個智能機器人、所述電源模塊、所述主控模塊和相連,用于監控所述至少一個智能機器人的電源信息、運行狀態、位置信息、傳感器的工作狀態和待巡檢設備的工作狀態,并生成在線報告發送至上位機。
5、通過上述技術方案,可以實時監控智能機器人的工作狀態、運行狀態、傳感器的工作狀態和待巡檢設備的工作狀態,能夠實時識別設備故障或安全隱患,以及機器人的工作狀態。
6、可選地,所述監控模塊,還包括:聲學報警單元和光學報警單元,用于在所述監控模塊監控到所述至少一個智能機器人檢測到所述待巡檢設備存在所述故障風險時,或者,至少一個智能機器人電量不足時,或者,至少一個智能機器人達到維護與保養里程和時間,執行聲學報警和/或光學報警動作。
7、可選地,所述數據采集模塊包括多個傳感器,其中,所述傳感器包括圖像傳感器、聲音傳感器、溫度傳感器,用于采集巡檢現場的圖像、聲音和溫度。
8、可選地,所述圖像傳感器為紅外熱成像儀和可見光相機,所述聲音傳感器為拾音器。
9、可選地,上述的基于機器人的可視化巡檢系統,還包括:可視化模塊,用于將采集到的數據和處理結果通過可視化界面進行展示。
10、本申請第二方面實施例提供一種基于機器人的可視化巡檢方法,采用上述的基于機器人的可視化巡檢系統實現,方法包括以下步驟:獲取遠程控制指令或自動生成指令;根據所述遠程控制指令或自動生成指令控制至少一個智能機器人執行在線或離線可視化巡檢任務。
11、可選地,在獲取遠程控制指令或自動生成指令之前,包括:識別當前智能機器人的標識;以所述標識為索引查詢數據庫確定當前智能機器人對應的巡檢任務和巡檢路線。
12、可選地,所述根據遠程控制指令或自動生成指令控制至少一個智能機器人執行在線或離線可視化巡檢任務,包括:判斷所述至少一個智能機器人是否處于第一網絡狀態;若所述至少一個智能機器人處于所述第一網絡狀態,則根據預設控制方式控制所述至少一個智能機器人進行離線巡檢,其中,第一網絡狀態包括網絡較差或無網絡狀態。
13、由此,本申請至少具有如下有益效果:
14、本申請實施例通過設置于至少一個智能機器人目標位置處的數據采集模塊實時采集智能機器人在巡檢過程中的巡檢環境數據,并通過設置與至少一個智能機器人目標位置處的主控模塊根據遠程控制指令或自動生成指令控制至少一個智能機器人執行在線或離線可視化巡檢任務。由此,解決了傳統巡檢方式主要依賴人工,不僅效率低下,而且巡檢質量不穩定等問題,機器人巡檢提高了巡檢效率,降低成本,保證數據客觀性和實時性。
15、本申請附加的方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本申請的實踐了解到。
技術特征:
1.一種基于機器人的可視化巡檢系統,其特征在于,包括:
2.根據權利要求1所述的基于機器人的可視化巡檢系統,其特征在于,還包括:
3.根據權利要求2所述的基于機器人的可視化巡檢系統,其特征在于,還包括:
4.根據權利要求3所述的基于機器人的可視化巡檢系統,其特征在于,所述監控模塊,還包括:
5.根據權利要求1所述的基于機器人的可視化巡檢系統,其特征在于,所述數據采集模塊包括多個傳感器,其中,所述傳感器包括圖像傳感器、聲音傳感器、溫度傳感器,用于采集巡檢現場的圖像、聲音和溫度。
6.根據權利要求5所述的基于機器人的可視化巡檢系統,其特征在于,所述圖像傳感器為紅外熱成像儀和可見光相機,所述聲音傳感器為拾音器。
7.根據權利要求1所述的基于機器人的可視化巡檢系統,其特征在于,還包括:
8.一種基于機器人的可視化巡檢方法,其特征在于,采用如權利要求1-7任一項所述的基于機器人的可視化巡檢系統實現,其中,所述方法包括以下步驟:
9.根據權利要求8所述的基于機器人的可視化巡檢方法,其特征在于,在獲取遠程控制指令或自動生成指令之前,包括:
10.根據權利要求8所述的基于機器人的可視化巡檢方法,其特征在于,所述根據所述遠程控制指令或自動生成指令控制至少一個智能機器人執行在線或離線可視化巡檢任務,包括:
技術總結
本申請涉及機器人技術領域,特別涉及一種基于機器人的可視化巡檢系統和方法,其中,系統包括:至少一個智能機器人;與至少一個智能機器人連接的電源模塊;設置于至少一個智能機器人目標位置處的數據采集模塊,用于實時采集智能機器人在巡檢過程中的巡檢環境數據;設置與至少一個智能機器人目標位置處的主控模塊,用于根據遠程控制指令或自動生成指令控制至少一個智能機器人執行在線或離線可視化巡檢任務。由此,解決了傳統巡檢方式主要依賴人工,不僅效率低下,而且巡檢質量不穩定等問題,機器人巡檢提高了巡檢效率,降低成本,保證數據客觀性和實時性。
技術研發人員:傅望安,朱宇晨,王海明,劉銘爍,王華,任鑫,魏昂昂
受保護的技術使用者:華能浙江平湖海上風電有限責任公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!