一種用于光伏巡檢的無人機空地通訊系統的制作方法
本發明涉及無人機空地通訊,特別是涉及一種用于光伏巡檢的無人機空地通訊系統。
背景技術:
1、現行的光伏巡檢主要分為人工巡檢和無人機巡檢兩種方法,人工巡檢雖能及時進行檢修,但是其花費時間較多,且容易存在漏檢的現象;無人機巡檢雖能減輕人工巡檢的壓力,但是,分析處理無人機報送的巡檢信息后,依舊需要施工人員進行現場檢修,且由于巡檢區域較大,巡檢人員在通勤上花費了較多的時間,巡檢效率較低。
技術實現思路
1、針對上述問題,本發明提供了一種通過設置光伏組件巡檢車,光伏組件巡檢車、巡檢人員與無人機同時出勤,巡檢人員在光伏組件巡檢車上進行總控,當無人機發現光伏組件運行狀態不正常時,巡檢人員能夠及時、有針對性地對光伏組件進行檢修的用于光伏巡檢的無人機空地通訊系統。
2、本發明的技術方案是:一種用于光伏巡檢的無人機空地通訊系統,包括無人機巡檢組件、空低通訊模塊和光伏組件巡檢車;
3、所述無人機巡檢組件,用于遠程巡檢光伏組件的運行狀態,
4、所述空低通訊模塊,用于進行無人機巡檢組件及光伏組件巡檢車的信息傳遞;
5、所述光伏組件巡檢車上設置有控制中心,所述光伏組件巡檢車上裝載有光伏組件的檢修工具;
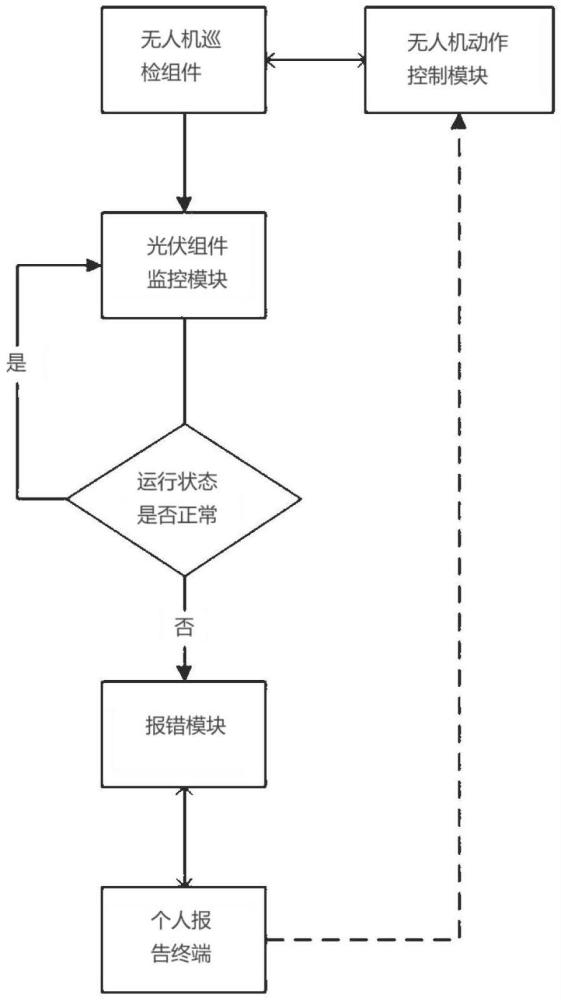
6、所述控制中心包括無人機動作控制模塊和光伏組件監控模塊;
7、所述無人機動作控制模塊通過空低通訊模塊與無人機巡檢組件電連接,所述光伏組件監控模塊包括分析模塊和報錯模塊;
8、所述分析模塊與所述報錯模塊電連接,所述無人機巡檢組件與分析模塊電連接,所述分析模塊實時分析無人機巡檢組件發送的巡檢信息,判斷當下光伏組件狀態是否正常,當分析得出運行狀態不正常時,所述分析模塊向報錯模塊發送運行狀態報告,所述報錯模塊報送維修任務或檢修任務。
9、在進一步的技術方案中,所述無人機巡檢組件包括無人機控制部分、可見光攝像頭和信息存儲部分,所述無人機控制部分與無人機動作控制模塊電連接;所述可見光攝像頭拍攝光伏組件狀態視頻,所述信息存儲部分存儲單位巡檢周期內的巡檢信息,所述巡檢信息包括可見光攝像頭拍攝的光伏組件狀態視頻。
10、在進一步的技術方案中,所述無人機巡檢組件通過空低通訊模塊將可見光攝像頭拍攝的光伏組件狀態視頻實時傳送至分析模塊,所述分析模塊實時分析可見光攝像頭拍攝的電力系統狀態視頻。
11、在進一步的技術方案中,所述分析模塊包括分析數據庫和比對分析模塊;
12、所述分析數據庫存儲有光伏組件狀態信息,所述比對分析模塊與所述分析數據庫電連接;
13、所述比對分析模塊包括視頻處理模塊、截取模塊和圖像比對識別部分,所述視頻處理模塊用于調整視頻的清晰度和完整度,所述截取模塊用于提取視頻中的有效信息并生成巡檢圖片,所述圖像比對識別部分用于對比巡檢圖片與光伏組件狀態信息并生成分析結果。
14、在進一步的技術方案中,所述圖像比對識別部分生成的分析結果包括設備正常、設備故障和狀態存疑三種,當分析結果為設備故障時,圖像比對識別部分向報錯單元發送運行狀態報告,所述報錯模塊報送維修任務,當分析結果為狀態存疑時,圖像比對識別部分向報錯單元發送檢修報告,所述報錯模塊報送檢修任務。
15、在進一步的技術方案中,包括個人報告終端,所述個人報告終端包括任務接收模塊和任務處理模塊,所述任務接收模塊與報錯模塊電連接,所述任務接收模塊用于接收維修任務和檢修任務,所述任務處理模塊與控制中心電連接,所述任務處理模塊用于報告任務處理進度,當任務完成后對應任務從報錯模塊消除,并且報錯模塊記錄檢修記錄。
16、在進一步的技術方案中,所述無人機空地通訊系統還包括行程預估模塊、優先級設置模塊和導向模塊,當預設定時間段內,所述報錯模塊報送了多個維修任務或檢修任務時,所述行程預估模塊用于按預設定速度為基準,并測算所述光伏組件巡檢車的位置分別與各個所述維修任務或檢修任務所在位置之間的行程時間;所述優先級設置模塊,用于設置各行程預估模塊的優先級,所述優先級高低按行程時間的升序排列,行程時間的值最小的優先級最高。所述導向模塊,用于引導光伏組件巡檢車向優先級最高的所述維修任務或檢修任務所在位置出發,且到達優先級最高的所述維修任務或檢修任務的位置后,刷新所述行程預估模塊,使得所述行程預估模塊重新按預設定速度為基準,并測算所述光伏組件巡檢車所在最新位置分別與剩下的各個所述維修任務或檢修任務所在位置之間的行程時間。
17、本發明的有益效果是:
18、1、本發明提供的無人機空地通訊系統,通過設置光伏組件巡檢車,并在電力光伏組件巡檢車上設置與無人機巡檢組件電連接的控制中心,保證光伏組件巡檢車、巡檢人員與無人機同時出勤,并且能夠實時對光伏組件運行狀態進行監控,光伏組件巡檢車上裝載有光伏組件的檢修工具,當報錯模塊報送維修任務后,巡檢人員可以及時根據任務信息選用適當的檢修工具進行檢修,節約檢修,提高檢修效率,檢修針對性強。
19、2、本發明通過行程預估模塊、優先級設置模塊和導向模塊的配合,使得巡檢維修過程更加高效。
技術特征:
1.一種用于光伏巡檢的無人機空地通訊系統,其特征在于,包括無人機巡檢組件、空低通訊模塊和光伏組件巡檢車;
2.根據權利要求1所述的一種用于光伏巡檢的無人機空地通訊系統,其特征在于,所述無人機巡檢組件包括無人機控制部分、可見光攝像頭和信息存儲部分,所述無人機控制部分與無人機動作控制模塊電連接;所述可見光攝像頭拍攝光伏組件狀態視頻,所述信息存儲部分存儲單位巡檢周期內的巡檢信息,所述巡檢信息包括可見光攝像頭拍攝的光伏組件狀態視頻。
3.根據權利要求2所述的一種用于光伏巡檢的無人機空地通訊系統,其特征在于,所述無人機巡檢組件通過空低通訊模塊將可見光攝像頭拍攝的光伏組件狀態視頻實時傳送至分析模塊,所述分析模塊實時分析可見光攝像頭拍攝的電力系統狀態視頻。
4.根據權利要求3所述的一種用于光伏巡檢的無人機空地通訊系統,其特征在于,所述分析模塊包括分析數據庫和比對分析模塊;
5.根據權利要求4所述的一種用于光伏巡檢的無人機空地通訊系統,其特征在于,所述圖像比對識別部分生成的分析結果包括設備正常、設備故障和狀態存疑三種,當分析結果為設備故障時,圖像比對識別部分向報錯單元發送運行狀態報告,所述報錯模塊報送維修任務,當分析結果為狀態存疑時,圖像比對識別部分向報錯單元發送檢修報告,所述報錯模塊報送檢修任務。
6.根據權利要求5所述的一種用于光伏巡檢的無人機空地通訊系統,其特征在于,所述無人機空地通訊系統還包括個人報告終端,所述個人報告終端包括任務接收模塊和任務處理模塊,所述任務接收模塊與報錯模塊電連接,所述任務接收模塊用于接收維修任務和檢修任務,所述任務處理模塊與控制中心電連接,所述任務處理模塊用于報告任務處理進度,當任務完成后對應任務從報錯模塊消除,并且報錯模塊記錄檢修記錄。
7.根據權利要求6所述的一種用于光伏巡檢的無人機空地通訊系統,其特征在于,所述無人機空地通訊系統還包括行程預估模塊、優先級設置模塊和導向模塊,
技術總結
本發明公開了一種用于光伏巡檢的無人機空地通訊系統,無人機巡檢組件用于遠程巡檢光伏組件的運行狀態,空低通訊模塊用于進行無人機巡檢組件及光伏組件巡檢車之間的信息傳遞;光伏組件巡檢車上設置有控制中心,光伏組件巡檢車上裝載有光伏組件的檢修工具;控制中心包括無人機動作控制模塊和光伏組件監控模塊;無人機動作控制模塊通過空低通訊模塊與無人機巡檢組件電連接,光伏組件監控模塊包括分析模塊和報錯模塊;分析模塊與所述報錯模塊電連接,無人機巡檢組件與分析模塊電連接,分析模塊實時分析無人機巡檢組件發送的巡檢信息,判斷當下光伏組件運行狀態不正常時,分析模塊向報錯模塊發送運行狀態報告,報錯模塊報送維修任務或檢修任務。
技術研發人員:吳瑊,欒福明,王勁松,武永鑫,姚謙,高伯翰
受保護的技術使用者:中國大唐集團科學技術研究總院有限公司華北電力試驗研究院
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!