機器人進入基站的方法、機器人及計算機可讀存儲介質與流程
本申請涉及機器人領域,尤其涉及一種機器人進入基站的方法、機器人及計算機可讀存儲介質。
背景技術:
1、隨著機器人技術的快速發展,機器人在各個領域的應用越來越廣泛。機器人常與基站配合使用,基站能夠為機器人提供停靠地點以及對機器人進行充電,機器人在完成工作后通常會進入基站以停放、維護、充電等。
2、然而目前機器人進站過程中容易與基站發生碰撞且進站效率較低。
技術實現思路
1、為解決上述技術問題,本申請提供一種機器人進入基站的方法、機器人及計算機可讀存儲介質,能夠避免機器人進站時與基站發生碰撞還可提高進站效率。
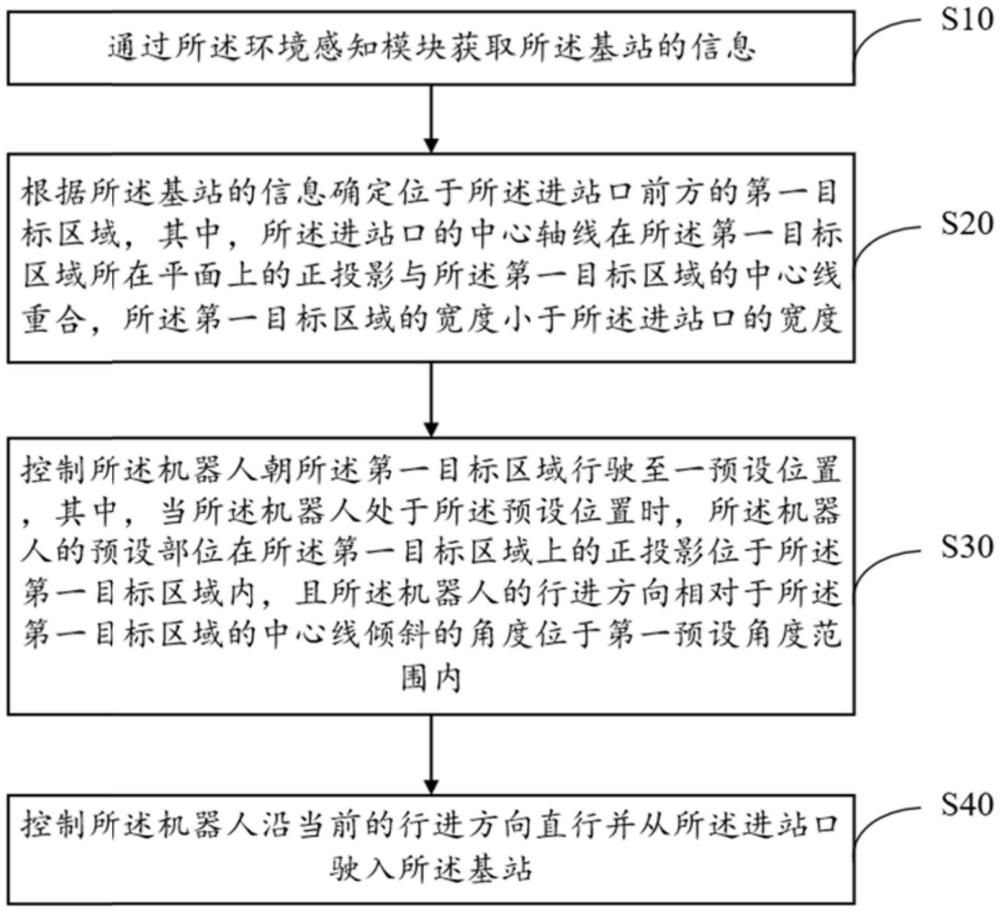
2、本申請第一方面提供一種機器人進入基站的方法,所述機器人包括環境感知模塊,所述基站包括進站口,用于供所述機器人進入所述基站。所述方法包括:通過所述環境感知模塊獲取所述基站的信息;根據所述基站的信息確定位于所述進站口前方的第一目標區域,其中,所述進站口的中心軸線在所述第一目標區域所在平面上的正投影與所述第一目標區域的中心線重合,所述第一目標區域的寬度小于所述進站口的寬度;控制所述機器人朝所述第一目標區域行駛至一預設位置,其中,當所述機器人處于所述預設位置時,所述機器人的預設部位在所述第一目標區域上的正投影位于所述第一目標區域內,且所述機器人的行進方向相對于所述第一目標區域的中心線傾斜的角度位于第一預設角度范圍內;控制所述機器人沿當前的行進方向直行并從所述進站口駛入所述基站。
3、本申請第二方面提供一種機器人,所述機器人包括環境感知模塊及控制模塊,所述環境感知模塊用于獲取基站的信息。所述控制模塊用于根據所述基站的信息確定位于所述進站口前方的第一目標區域,其中,所述進站口的中心軸線在所述第一目標區域所在平面上的正投影與所述第一目標區域的中心線重合,所述第一目標區域的寬度小于所述進站口的寬度,并控制所述機器人朝所述第一目標區域行駛至一預設位置,其中,當所述機器人處于所述預設位置時,所述機器人的預設部位在所述第一目標區域上的正投影位于所述第一目標區域內,且所述機器人的行進方向相對于所述第一目標區域的中心線傾斜的角度位于第一預設角度范圍內,以及控制所述機器人沿當前的行進方向直行并從所述進站口駛入所述基站。
4、本申請第三方面提供一種計算機可讀存儲介質,所述計算機可讀存儲介質內存儲有計算機程序,所述計算機程序用于供處理器調用后執行,以實現前述的機器人進入基站的方法。
5、本申請提供的機器人進入基站的方法、機器人及計算機可讀存儲介質,通過獲取所述基站的信息,并根據所述基站的信息確定位于所述基站的進站口前方的第一目標區域,并控制所述機器人行駛至所述機器人的預設部位在第一目標區域內,且所述機器人的行進方向相對所述第一目標區域的中心線傾斜的角度位于第一預設角度范圍內,可避免機器人在駛入基站的過程中與所述基站發生碰撞,還可使得所述機器人快速進入所述基站,提高進站效率。
技術特征:
1.一種機器人進入基站的方法,應用于機器人,其特征在于,所述機器人包括環境感知模塊,所述基站包括進站口,用于供所述機器人進入所述基站;所述方法包括:
2.根據權利要求1所述的機器人進入基站的方法,其特征在于,所述基站內設有標識,所述標識與所述進站口相對;所述方法還包括:
3.根據權利要求2所述的機器人進入基站的方法,其特征在于,所述至少根據獲取到的所述標識的信息規劃第一行駛路徑,包括:
4.根據權利要求2所述的機器人進入基站的方法,其特征在于,在所述通過所述環境感知模塊獲取所述標識的信息之前,所述方法還包括:
5.根據權利要求2所述的機器人進入基站的方法,其特征在于,所述第一目標區域包括預設區域;所述至少根據獲取到的所述標識的信息規劃第一行駛路徑,包括:
6.根據權利要求5所述的機器人進入基站的方法,其特征在于,所述方法還包括:
7.根據權利要求2所述的機器人進入基站的方法,其特征在于,所述方法還包括:
8.根據權利要求7所述的機器人進入基站的方法,其特征在于,所述機器人包括碰撞傳感器,所述方法還包括:
9.一種機器人,其特征在于,包括:
10.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質內存儲有計算機程序,所述計算機程序用于供處理器調用后執行,以實現如權利要求1-8任一項所述的機器人進入基站的方法。
技術總結
本申請提供一種機器人進入基站的方法、機器人及計算機可讀存儲介質。機器人進入基站的方法包括:通過環境感知模塊獲取基站的信息;根據基站的信息確定位于進站口前方的第一目標區域,進站口的中心軸線在第一目標區域所在平面上的正投影與第一目標區域的中心線重合,第一目標區域的寬度小于進站口的寬度;控制機器人朝第一目標區域行駛至一預設位置,其中,當機器人處于預設位置時,機器人的預設部位在第一目標區域上的正投影位于第一目標區域內,且機器人的行進方向相對于第一目標區域的中心線傾斜的角度位于第一預設角度范圍內;控制機器人沿當前的行進方向直行并從進站口駛入基站。本申請提供的方法可避免機器人碰撞還可提高進站效率。
技術研發人員:潘銳擇
受保護的技術使用者:深圳森合創新科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!