一種基于雷達用采集定位結合算法的制作方法
本發明涉及雷達,具體為一種基于雷達用采集定位結合算法。
背景技術:
1、雷達,全稱為無線電探測和測距,顧名思義,雷達是一種通過無線電發射和接收來對觀測場景進行探測的工具;
2、但是現有的雷達定位結合算法,在雷達掃描到目標后,通過電感塊計算雷達掃描的方位,進而增加了雷達在計算目標數據的時間,為此,我們提出一種基于雷達用采集定位結合算法。
技術實現思路
1、本發明的目的在于提供一種基于雷達用采集定位結合算法。
2、以解決上述背景技術中提出的問題,本發明提供如下技術方案:一種基于雷達用采集定位結合算法,具體實現步驟如下:
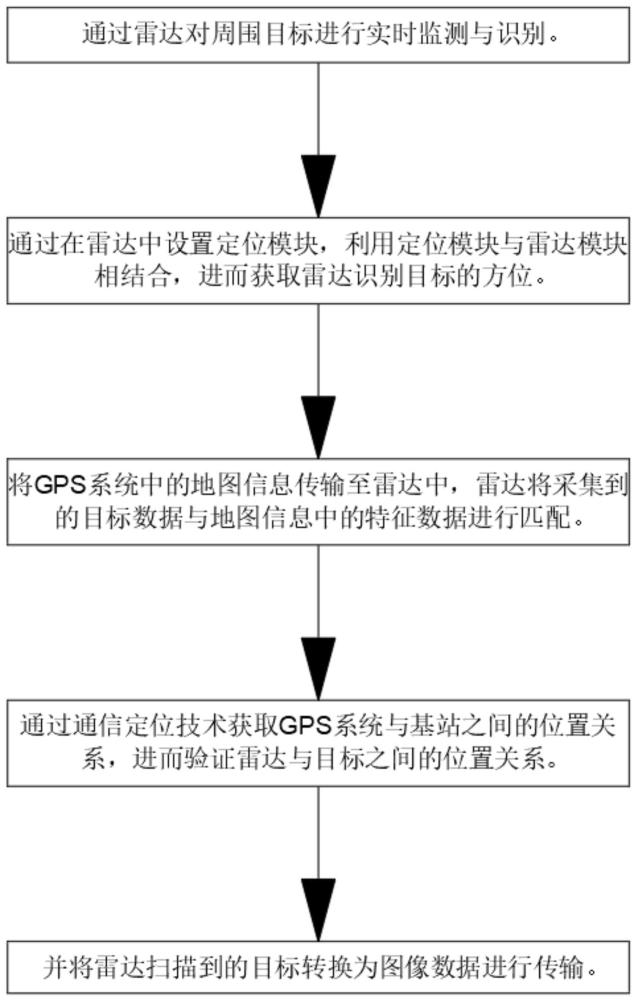
3、s100、通過雷達對周圍目標進行實時監測與識別;
4、s200、通過在雷達中設置定位模塊,利用定位模塊與雷達模塊相結合,進而獲取雷達識別目標的方位;
5、s300、將gps系統中的地圖信息傳輸至雷達中,雷達將采集到的目標數據與地圖信息中的特征數據進行匹配;
6、s400、通過通信定位技術獲取gps系統與基站之間的位置關系,進而驗證雷達與目標之間的位置關系;
7、s500、并將雷達掃描到的目標轉換為圖像數據進行傳輸;
8、其中s200中的定位模塊應用于激光感應器以及方位碼盤,且方位碼盤陣列于雷達的底部,使得雷達在轉動的過程中帶動方位碼盤在激光感應器之間進行移動,通過在方位碼盤上設置不同間距的距離進而計算雷達掃描的目標所在方位,其中具體算法為:
9、
10、
11、其中,表示雷達的轉動速度,表示激光感應器斷連狀態下方位碼盤的位移弧長,表示激光感應器的斷連時間,分別表示不同方位碼盤的寬度,且不同的方位碼盤寬度代表雷達的弧度值不同,進而減少方位對目標數據的方位計算,通過利用虛擬陣列算法獲取當前方位上的目標數據。
12、作為本發明的進一步方案:所述虛擬列陣算法的具體公式如下:
13、
14、
15、其中,表示微波速度,表示信號的往返時間,表示目標與不同陣元之間的距離,表示不同陣元的權重系數,表示目標不同位置到不同虛擬陣列元之間的距離,進而合成的虛擬陣列信號,進而根據不同的陣元和權重系數獲取目標虛擬列陣信號,進而對虛擬列陣信號進行濾波、壓縮以及分析的操作,進而獲取目標圖像數據。
16、作為本發明的進一步方案,所述s100中的具體步驟如下:
17、s110、將高頻發射器、高頻接收器以及轉向器進行安裝;
18、s120、然后將定位模塊安裝在轉向器上,并將定位模塊、高頻發射器、高頻接收器以及轉向器與雷達之間進行通信連接。
19、作為本發明的進一步方案,所述s300中的具體步驟如下:
20、s310、獲取雷達中目標數據;
21、s320、將gps系統中的地圖信息傳輸至雷達,然后獲取地圖信息中的特征數據;
22、s330、將地圖目標數據與雷達掃描到的成像目標數據相結合;
23、s340、將雷達掃描到的目標成像特征數據與地圖中的特性數據相匹配,進而獲取地圖中的目標數據,獲取雷達目標在地圖上的位置坐標。
24、作為本發明的進一步方案:所述s340中通過歐式距離的特征匹配公式獲取,具體公式如下:
25、
26、其中,表示特征描述和之間的歐式距離數值,q表示和的特征分量數值,表示特征描述的維度數值,進而確定雷達識別目標與地圖上目標位置。
27、作為本發明的進一步方案,所述s400中的具體步驟如下:
28、s410、識別雷達圖像特征中的基站特征數據,并將基站特征數據與雷達數據相結合;
29、s420、通過網絡傳輸和共享,將雷達與基站數據進行結合,雷達向基站傳輸0m~500m雷達范圍內的通信調取指令,基站將具有通信功能的位置數據傳輸至雷達上,雷達通過虛擬陣列算法獲取目標距離數據,并將目標與位置的數據相結合,進而再次驗算雷達位置的精準性。
30、作為本發明的進一步方案:所述s420中通過距離計算目標坐標位置,其中具體公式如下:
31、
32、其中,(,)表示雷達坐標,且將雷達坐標設為基準點。
33、作為本發明的進一步方案,所述s500中的具體步驟如下:
34、s510、將雷達數據通過網絡進行傳輸,將雷達識別到的目標數據和雷達坐標數據通過網絡傳輸至與雷達相連接的系統上;
35、s520、雷達創建錄入指令,并將錄入指令傳輸至相連接的系統上,以便系統對雷達傳輸的數據進行存儲。
36、采用上述技術方案,與現有技術相比,本發明的有益效果在于:
37、1.本發明通過定位模塊中的光電感應器與方位碼盤相互配合,進而在雷達掃描到目標時,定位模塊根據識別方位碼盤的位置,進而判斷雷達掃描到的目標與雷達的正交角度所產生的弧度值,在雷達采集目標數據時,減少了雷達在掃描到目標數據后需要計算目標方位的時間,提高了雷達采集目標的效率;
38、2.本發明通過獲取地圖數據以及雷達成像數據進行匹配,進而獲取目標到雷達之間的距離,然后通過計算雷達目標的坐標位置,通過雷達與基站之間進行通信,獲取目標是否具有與基站通信功能,進而獲取目標與基站的位置,然后雷達進行驗算目標與自己之間的距離,提高了雷達定位的精準性;
39、3.本發明通過虛擬陣列算法將雷達掃描到的目標進行成像,將圖像特征與地圖特征進行匹配,進而獲取高精度的雷達位置,以及雷達識別到的目標數據,達到了快速獲取雷達在地圖中位置的效果。
技術特征:
1.一種基于雷達用采集定位結合算法,其特征在于,具體實現步驟如下:
2.根據權利要求1所述的一種基于雷達用采集定位結合算法,其特征在于,所述虛擬列陣算法的具體公式如下:
3.根據權利要求1所述的一種基于雷達用采集定位結合算法,其特征在于,所述s100中的具體步驟如下:
4.根據權利要求1所述的一種基于雷達用采集定位結合算法,其特征在于,所述s300中的具體步驟如下:
5.根據權利要求4所述的一種基于雷達用采集定位結合算法,其特征在于:所述s340中通過歐式距離的特征匹配公式獲取,具體公式如下:
6.根據權利要求1所述的一種基于雷達用采集定位結合算法,其特征在于,所述s400中的具體步驟如下:
7.根據權利要求6所述的一種基于雷達用采集定位結合算法,其特征在于:所述s420中通過距離計算目標坐標位置,其中具體公式如下:
8.根據權利要求1所述的一種基于雷達用采集定位結合算法,其特征在于:所述s500中的具體步驟如下:
技術總結
本發明公開了一種基于雷達用采集定位結合算法,本發明涉及雷達技術領域,具體實現步驟如下:通過雷達對周圍目標進行實時監測與識別,通過在雷達中設置定位模塊,利用定位模塊與雷達模塊相結合,進而獲取雷達識別目標的方位,將GPS系統中的地圖信息傳輸至雷達中,雷達將采集到的目標數據與地圖信息中的特征數據進行匹配,本發明的優點在于:通過定位模塊中的光電感應器與方位碼盤相互配合,進而在雷達掃描到目標時,定位模塊根據識別方位碼盤的位置,進而判斷雷達掃描到的目標與雷達的正交角度所產生的弧度值,在雷達采集目標數據時,減少了雷達在掃描到目標數據后需要計算目標方位的時間,提高了雷達采集目標的效率。
技術研發人員:周煒,李成夏
受保護的技術使用者:常州雙禾電子有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!