激光陀螺鎖區的數字抖動驅動控制電路及工作方法與流程
本發明涉及數字電路的,尤其涉及一種激光陀螺鎖區的數字抖動驅動控制電路,以及一種激光陀螺鎖區的數字抖動驅動控制電路的工作方法。
背景技術:
1、激光陀螺憑借精度高、體積小、成本低等特點而廣泛應用于慣性導航系統中,其在系統中的定位功能之一是測量運動載體的轉動速度,感知其姿態。
2、如圖1所示,激光陀螺存在的問題之一是鎖區效應,鎖區效應是指,當激光陀螺感知到的載體轉速小于一定值時,激光陀螺的輸出角頻差為0,從而無法解算出對應的轉速。
3、產生鎖區是由于光在傳播方向上的非均勻性損耗,反射鏡的背向散射光相互干涉。
4、解決激光陀螺鎖區問題的方法是繞開或者打散鎖區,可以從以下幾方面入手:
5、1、從器件本身入手:研制和加工更高質量的反射鏡。
6、2、加入偏頻信號:最常用的成功的偏頻方式是機械抖動偏頻方式,這種方式是激光陀螺本體在驅動裝置(如圖2所示)的控制下,產生正弦的交變抖動(如圖4所示)。
7、傳統的幅度抖動控制回路是以機械抖動偏頻量作為對比對象,根據激光陀螺鎖區消除的公式,機械抖動偏頻量=機械抖動頻率*機械抖動幅度。具體如圖3所示。
8、但是,通過機械抖動偏頻方式是無法得到理想的線性輸出,起振和恢復都比較慢,頻率跟蹤精度低。而且當激光陀螺在變溫環境下工作時,機械抖動頻率隨溫度的升高而減小,機械抖動幅度隨溫度升高而增加,抖動幅度不穩定。
技術實現思路
1、為克服現有技術的缺陷,本發明要解決的技術問題是提供了一種激光陀螺鎖區的數字抖動驅動控制電路,其能夠更接近理想的線性輸出,可以快速起振和抖動恢復,具有高的頻率跟蹤精度,抖動幅度足夠大且穩定,能夠提高陀螺在變溫環境下的測量精度。
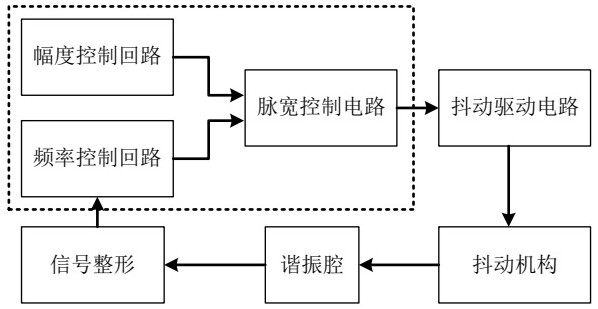
2、本發明的技術方案是:這種激光陀螺鎖區的數字抖動驅動控制電路,其包括信號依次經過的抖動驅動控制電路、抖動驅動電路、抖動機構、諧振腔和信號整形電路;
3、抖動驅動控制電路包括:幅度控制回路、頻率控制回路、脈寬控制電路;
4、通過四倍頻鑒相計數獲得機械抖動偏頻量,幅度控制回路提取機械抖動偏頻量并獲得實時機械抖動幅度;頻率控制回路提取機械抖動頻率并根據頻率反饋信號計算出實時機械抖動頻率;脈寬控制電路將機械抖動幅度和實時機械抖動頻率作為參考對象進行比對,根據機械抖動幅度基準解算出誤差,再進行實時控制補償變化量。
5、還提供了一種激光陀螺鎖區的數字抖動驅動控制電路的工作方法,其包括:
6、(i)確定激光陀螺的靜態鎖區;
7、(ii)激光陀螺加入抖動驅動信號,將靜態鎖區變成小的動態鎖區;
8、(iii)激光陀螺加入偽隨機信號,將小的動態鎖區消除。
9、還提供了另一種激光陀螺鎖區的數字抖動驅動控制電路的工作方法,其包括以下步驟:
10、(1)通過四倍頻鑒相計數獲得機械抖動偏頻量;
11、(2)幅度控制回路提取機械抖動偏頻量并獲得實時機械抖動幅度;
12、(3)頻率控制回路提取機械抖動頻率并根據頻率反饋信號計算出實時機械抖動頻率;
13、(4)脈寬控制電路將機械抖動幅度和實時機械抖動頻率作為參考對象進行比對,根據機械抖動幅度基準解算出誤差,再進行實時控制補償變化量。
14、本發明的有益技術效果是:通過四倍頻鑒相計數獲得機械抖動偏頻量,幅度控制回路提取機械抖動偏頻量并獲得實時機械抖動幅度;頻率控制回路提取機械抖動頻率并根據頻率反饋信號計算出實時機械抖動頻率;脈寬控制電路將機械抖動幅度和實時機械抖動頻率作為參考對象進行比對,根據機械抖動幅度基準解算出誤差,再進行實時控制補償變化量;因此能夠更接近理想的線性輸出,可以快速起振和抖動恢復,具有高的頻率跟蹤精度,抖動幅度足夠大且穩定,能夠提高陀螺在變溫環境下的測量精度。
技術特征:
1.激光陀螺鎖區的數字抖動驅動控制電路,其特征在于:其包括信號依次經過的抖動驅動控制電路、抖動驅動電路、抖動機構、諧振腔和信號整形電路;
2.根據權利要求1所述的激光陀螺鎖區的數字抖動驅動控制電路,其特征在于:該電路還包括頻率跟蹤和穩定模塊,其提供頻率反饋信號,該模塊為全數字式鎖相環系統。
3.根據權利要求2所述的激光陀螺鎖區的數字抖動驅動控制電路,其特征在于:所述全數字式鎖相環系統包括級聯的兩個一階全數字式鎖相環。
4.根據權利要求2所述的激光陀螺鎖區的數字抖動驅動控制電路,其特征在于:所述全數字式鎖相環系統包括:第一環路、第二環路、加法器;第一環路包括依次連接的第一異或門鑒相器、第一k計數器、第一id計數器、第一除n計數器;第二環路包括依次連接的第二異或門鑒相器、第二k計數器、第二id計數器、第二除n計數器;第二環路的輸出取反后進入加法器,第一環路的輸出進入加法器,加法器的輸出連接第一異或門鑒相器,第一環路的輸出作為頻率反饋信號;其中k計數器是環路濾波器,id計數器是增減計數器,除n計數器與增減計數器一起工作共同構成數字控制振蕩器。
5.根據權利要求1所述的激光陀螺鎖區的數字抖動驅動控制電路的工作方法,其特征在于:其包括以下步驟:
6.根據權利要求1所述的激光陀螺鎖區的數字抖動驅動控制電路的工作方法,其特征在于:其包括以下步驟:
7.根據權利要求6所述的激光陀螺鎖區的數字抖動驅動控制電路的工作方法,其特征在于:所述步驟(3)中,設置頻率跟蹤和穩定模塊,其提供頻率反饋信號,該模塊為全數字式鎖相環系統。
8.根據權利要求7所述的激光陀螺鎖區的數字抖動驅動控制電路的工作方法,其特征在于:所述步驟(3)包括以下分步驟:
技術總結
激光陀螺鎖區的數字抖動驅動控制電路及工作方法,更接近理想的線性輸出,快速起振和抖動恢復,具有高的頻率跟蹤精度,抖動幅度足夠大且穩定,提高陀螺在變溫環境下的測量精度。電路包括信號依次經過的抖動驅動控制電路、抖動驅動電路、抖動機構、諧振腔和信號整形電路;抖動驅動控制電路包括:幅度控制回路、頻率控制回路、脈寬控制電路;通過四倍頻鑒相計數獲得機械抖動偏頻量,幅度控制回路提取機械抖動偏頻量并獲得實時機械抖動幅度;頻率控制回路提取機械抖動頻率并根據頻率反饋信號計算出實時機械抖動頻率;脈寬控制電路將機械抖動幅度和實時機械抖動頻率作為參考對象進行比對,根據機械抖動幅度基準解算出誤差,再進行實時控制補償變化量。
技術研發人員:柳敬云,徐成華,潘勇,魏育成
受保護的技術使用者:中科億海微電子科技(蘇州)有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!