一種用于力反饋設備的多自由度校準裝置的制作方法
本發明屬于力反饋的校準,具體是指一種用于力反饋設備的多自由度校準裝置。
背景技術:
1、人機交互技術作為推動各行業數字化、智能化的有力工具,當前得到了廣泛的研究與應用。現有的人機交互技術主要關注視覺和聽覺方面,較少涉及力覺交互技術的研究。視覺和聽覺交互以光和聲音為信息載體,實現非接觸式的信息傳遞。相較之下,力覺交互屬于接觸式信息交互,能夠給人帶來力感和運動感的刺激,從而提升交互效果和效率。力反饋技術作為力覺人機交互的關鍵實現途徑,通過特殊機械結構和傳動裝置產生的反作用力,模擬真實環境中人所受到的作用力大小、方向及阻尼感受,為用戶提供逼真的力覺體驗。借助力反饋設備,用戶可獲得與實際觸摸物體時相似的力感和運動感,增強人機交互的沉浸感,使其仿佛置身于現實環境之中。因此,力反饋技術在人機交互領域具有不可替代的重要地位。
2、虛擬力建模技術是在虛擬現實系統中實現力反饋的一項關鍵技術,主要解決虛擬環境中的力和力矩的大小、方向的計算問題。由于人不可能進入計算機模擬的虛擬環境中進行直接的信息交互,所以為了讓操作更為自然,一般會在虛擬現實環境中安放虛擬代理來代替人進行環境探索。而力反饋設備反饋的力和力矩其實是代理與虛擬現實環境交互過程中所受到虛擬物體作用力和力矩。一般虛擬環境中的力和力矩的大小、方向的計算可以分為兩個子問題來解決:第一,虛擬環境中的物體由頂點、線段和多邊形組成,如何檢測虛擬物體之間的碰撞;第二,檢測出碰撞后,如何計算力的大小以及方向。解決這兩個問題的過程是對虛擬力建模的一般過程,如果虛擬環境中的物體不是一般的剛性物體,而是水和橡皮等流體或者柔性物體時,還需要對這些物體進行深入的物理建模對于虛擬力建模方法的進一步研究可以極大的提高力反饋的效果,從而使虛擬現實系統反饋給操作者的力覺信息更為全面和逼真。因此,對于校準技術和裝置而言,如何模擬碰撞和阻尼產生的不同方向、不同力值的大小,并覆蓋整個測量范圍,是研究的關鍵。
3、目前,對于力反饋設備的標定和校準主要有三種方法。一是傳統標定方法,常采用不加導向的一維拉壓力傳感器、直角尺、鋼板尺等測量工具進行檢測,通過變換傳感器的安裝方向來測量手控器在多個方向上的力,無法同時測量力反饋在空間三個方向的分量,無法測量手控器輸出力反饋的耦合狀況;傳統標定方法也有采用三個一維力傳感器互相垂直安裝,此方法使得整個標定系統復雜龐大,且在安裝傳感器的時候由于工藝的緣故很難實現完全的互相垂直,影響精度。二是以北理工南昌研究院為代表的檢測機構,采用對機構進行分解并逆向建模,并對電機參數進行模擬,再在solidworks等仿真模擬軟件中對末端進行解算,最終得到末端位置的模擬位移和力值,達到校準的目的;該方法屬于模擬檢測,并非實測,只能驗證設計參數,但無法將安裝和加工等引入的誤差代入校準,因此局限性較大。三是以東南大學、上海交大等為代表的高校,采取的方法主要是采用多個電控移動滑臺模組搭建成校準機構,其主要由步進電機、滾珠絲桿、滑臺以及導軌組成。滾珠絲桿用于將電機的旋轉運動轉化為滑臺的線性運動。一個滑臺模組只能測量力反饋設備末端一個方向的運動位移,要想將末端位置的空間坐標都測量出來,共需要三個滑臺模組,并且三個模組的安裝需要保證兩兩垂直。但是該方法僅能進行位置的標定,無法同時進行力的校準。華南理工大學、東南大學的研究者也曾嘗試在標定末端安裝力傳感器,但由于測量準確度低、解耦復雜,無法達到設計目標。
技術實現思路
1、本發明所要解決的技術問題在于提供一種用于力反饋設備的多自由度校準裝置,針對六自由度下不同狀態的校準,提高測量的準確度。
2、本發明是這樣實現的:
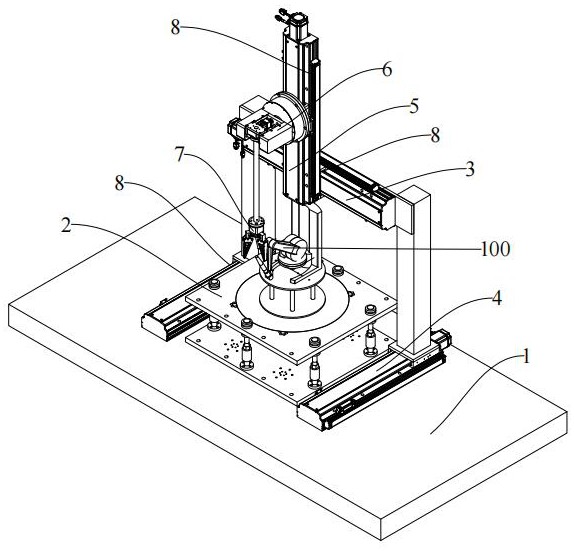
3、一種用于力反饋設備的多自由度校準裝置,:包括:基礎平臺、多分量測力平臺、三自由度直線位移平臺、三自由度轉臺和柔性夾具;
4、所述基礎平臺上方設置所述多分量測力平臺;
5、所述多分量測力平臺上設置被校準的力反饋設備;
6、所述三自由度直線位移平臺設置在所述基礎平臺上;
7、所述三自由度直線位移平臺,包括:x向平動模組、y向平動模組和z向平動模組;每個所述平動模組,均包括:伺服電機、直線導軌、載物臺、滾珠絲杠;所述直線導軌上設置所述載物臺,所述滾珠絲桿設在所述直線導軌內;所述伺服電機通過彈性聯軸器帶動所述滾珠絲杠移動,從而帶動所述載物臺產生移動;
8、所述y向平動模組的直線導軌,為設置在所述多分量測力平臺兩側的兩個縱向直線導軌;所述x向平動模組,為龍門架式,架設于所述y向平動模組的兩個所述縱向直線導軌上方,所述x向平動模組的直線導軌為橫向直線導軌,設于龍門架頂部橫梁上;所述z向平動模組的直線導軌為豎向直線導軌,設置在所述x向平動模組的橫向直線導軌上;
9、所述x向平動模組的橫向直線導軌、所述y向平動模組的縱向直線導軌和所述z向平動模組的豎向直線導軌上均設置有一位移測量元件;
10、所述三自由度轉臺設在所述z向平動模組的豎向直線導軌上;所述三自由度轉臺的三個轉軸上均設置有一轉角測量元件;
11、所述三自由度轉臺連接所述柔性夾具;
12、所述柔性夾具連接被校準的力反饋設備?。
13、進一步地,所述三自由度轉臺,采用型號為wmd3ss的電動多維旋轉臺。
14、進一步地,所述柔性夾具,為陣列式柔性夾具。
15、進一步地,所述位移測量元件,為光柵尺。
16、進一步地,所述轉角測量元件,為角度編碼器。
17、本發明的優點在于:主要針對市面上常見的商用和力反饋設備的校準問題,研究設計用于力反饋設備三維力測量的測量元件,并研究不同維度解耦方法,解決準確測量的難題;針對六自由度下不同狀態的校準,設計適用于六自由度加載的運動平臺和運動控制方法,提高測量的準確度;采用陣列式柔性夾具,滿足不同手柄裝夾要求。
技術特征:
1.一種用于力反饋設備的多自由度校準裝置,其特征在于:包括:基礎平臺、多分量測力平臺、三自由度直線位移平臺、三自由度轉臺和柔性夾具;
2.如權利要求1所述的一種用于力反饋設備的多自由度校準裝置,其特征在于:所述三自由度轉臺,采用型號為wmd3ss的電動多維旋轉臺。
3.如權利要求1所述的一種用于力反饋設備的多自由度校準裝置,其特征在于:所述柔性夾具,為陣列式柔性夾具。
4.如權利要求1所述的一種用于力反饋設備的多自由度校準裝置,其特征在于:所述位移測量元件,為光柵尺。
5.如權利要求1所述的一種用于力反饋設備的多自由度校準裝置,其特征在于:所述轉角測量元件,為角度編碼器。
技術總結
一種用于力反饋設備的多自由度校準裝置,包括:基礎平臺、多分量測力平臺、三自由度直線位移平臺、三自由度轉臺和柔性夾具;基礎平臺上方設置多分量測力平臺;多分量測力平臺上設置被校準的力反饋設備;三自由度直線位移平臺設置在基礎平臺上;三自由度直線位移平臺的直線導軌上均設置有一位移測量元件;三自由度轉臺設在Z向平動模組的豎向直線導軌上;三自由度轉臺的三個轉軸上均設置有一轉角測量元件;述三自由度轉臺連接柔性夾具;柔性夾具連接被校準的力反饋設備。本發明設計了適用于六自由度加載的運動平臺和運動控制方法,提高測量的準確度。
技術研發人員:林碩,張勇,闕鵬峰,陳玉芳,謝杰,王秀榮
受保護的技術使用者:福建省計量科學研究院(福建省眼鏡質量檢驗站)
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!