一種風力發電機葉片清洗方法及無人機
本發明涉及風力發電機葉片清洗,尤其涉及一種風力發電機葉片清洗方法及無人機。
背景技術:
1、風力發電機是將風能轉換為機械功,機械功帶動轉子旋轉,最終輸出交流電的電力設備。風力發電機一般有風輪、發電機(包括裝置)、調向器(尾翼)、塔架、限速安全機構和儲能裝置等構件組成。風力發電機的工作原理比較簡單,風輪在風力的作用下旋轉,它把風的動能轉變為風輪軸的機械能,發電機在風輪軸的帶動下旋轉發電。廣義地說,風能也是太陽能,所以也可以說風力發電機,是一種以太陽為熱源,以大氣為工作介質的熱能利用發電機。
2、風力發電機葉片是風力發電機中主要零件之一,在風力發電機日常維護中一項重要的工作即是對風力發電機葉片進行清洗,目前風力發電機葉片的清洗主要是通過人工進行的,需要消耗較多的人力,且由于風力發電機葉片尺寸較大,因此存在安全隱患。
3、鑒于此,特提出此發明。
技術實現思路
1、本發明的目的是為了解決現有技術中存在的缺點,而提出的一種風力發電機葉片清洗方法,本發明的方法主要通過無人機對風力發電機葉片進行清洗,減少人工參與,另外,本發明還提出了一種無人機。
2、為了實現上述目的,本發明采用了如下技術方案:
3、一種風力發電機葉片清洗方法,由無人機執行清洗工作,所述無人機上設置有清潔劑箱、水箱、扇形噴頭和攝像頭,所述清潔劑箱和所述水箱通過不同的管道連通所述扇形噴頭,所述扇形噴頭的開口尺寸可調;所述的清洗方法包括如下步驟:
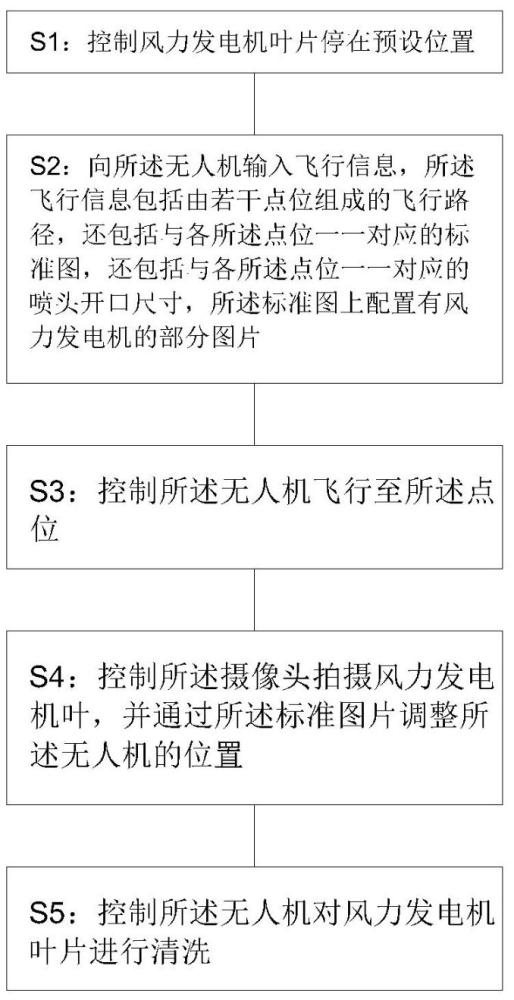
4、s1:控制風力發電機葉片停在預設位置;
5、s2:向所述無人機輸入飛行信息,所述飛行信息包括由若干點位組成的飛行路徑,還包括與各所述點位一一對應的標準圖,還包括與各所述點位一一對應的噴頭開口尺寸,所述標準圖上配置有風力發電機的部分圖片;
6、s3:控制所述無人機飛行至所述點位;
7、s4:控制所述攝像頭拍攝風力發電機葉獲取,并通過所述標準圖片調整所述無人機的位置;
8、s5:控制所述無人機對風力發電機葉片進行清洗。
9、進一步,s3-s5循環執行,直到所述無人機飛行完全部所述點位,實現全部所述清洗位置的清洗。
10、進一步,所述s4可包括如下步驟:
11、s41:控制所述攝像頭拍攝風力發電機葉片,獲取第一圖片;
12、s42:計算風力發電機葉片在第一圖片中的第一位置及第一面積;
13、s43:計算風力發電機葉片在標準圖片中的標準位置及標準面積;
14、s44:根據第一差值和第二差值調整所述無人機的位置,所述第一差值為第一位置和所述標準位置的差值,所述第二差值為第一面積和所述標準面積的差值。
15、進一步,s41-s44循環執行,直到所述第一差值和所述第二差值滿足預設范圍。
16、進一步,在s5后還包括如下步驟:
17、s6:檢測所述清潔劑箱和所述水箱的余量;
18、s7:若二者均大于預設閾值,則返回執行s3;
19、s8:若二者之一或二者均小于等于預設閾值,則控制所述無人機飛回。
20、進一步,在s5后還包括如下步驟:
21、s9:控制所述攝像頭拍攝風力發電機葉片,獲取第二圖片;
22、s10:識別所述第二圖片中是否存在污漬;
23、s11:若是則再次控制所述無人機對風力發電機葉片進行清洗;
24、s12:若否則返回執行s3。
25、進一步,在s5后還包括如下步驟:s13:控制所述攝像頭拍攝風力發電機葉片,獲取第二圖片;
26、s14:識別所述第二圖片中是否存在污漬;
27、s15:若是則再次控制所述無人機對風力發電機葉片進行清洗,并執行s17;
28、s16:若否則返回執行s3;
29、s17:控制所述攝像頭拍攝風力發電機葉片,獲取第三圖片;
30、s18:識別所述第三圖片中是否存在污漬;
31、s19:若是則將當前所述點位標記為問題點位;
32、s20:若否則返回執行s3。
33、一種無人機,包括:主體,還包括包括:設置與所述主體的清潔劑箱、水箱、扇形噴頭和攝像頭,所述清潔劑箱和所述水箱通過不同的管道連通所述扇形噴頭;
34、所述扇形噴頭包括:扇形頂板、扇形底板、側板;所述扇形頂板和所述扇形底板上下平行設置,所述側板為兩個,設置于所述扇形頂板和所述扇形底板之間;
35、兩個所述側板朝向所述主體內的一端轉動連接于所述主體,為所述側板的旋轉端,所述側板的另一端為其活動端;
36、所述扇形頂板、所述扇形底板和所述側板的旋轉端構成所述扇形噴頭的入口,用于連通所述清潔劑箱和所述水箱;所述扇形頂板、所述扇形底板和所述側板的活動端構成所述扇形噴頭的開口,清潔劑和水通過該開口噴射而出,當所述側板的旋轉端轉動時,所述扇形噴頭的開口的尺寸發生改變。
37、本發明與現有技術相比,其有益效果為:
38、1、本發明的清洗方法,通過無人機對風力發電機葉片進行清洗,減少人工參與;
39、2、為實現風力發電機葉片各所述清洗位置的進準清洗,本發明采用的方案首先是精準控制所述無人機的位置,在此基礎上控制所述扇形噴頭的開口尺寸,實現清潔劑和水噴射范圍的控制,進而實現精準清洗;
40、3、為實現精準控制所述無人機的位置,本發明采用的方案首先是將所述無人機飛行之所述點位,然后是通過通過所述標準圖片再次調整所述無人機的位置。
技術特征:
1.一種風力發電機葉片清洗方法,其特征在于,由無人機執行清洗工作,所述無人機上設置有清潔劑箱、水箱、扇形噴頭和攝像頭,所述清潔劑箱和所述水箱通過不同的管道連通所述扇形噴頭,所述扇形噴頭的開口尺寸可調;所述的清洗方法包括如下步驟:
2.根據權利要求1所述的一種風力發電機葉片清洗方法,其特征在于,s3-s5循環執行,直到所述無人機飛行完全部所述點位,實現全部所述清洗位置的清洗。
3.根據權利要求1所述的一種風力發電機葉片清洗方法,其特征在于,所述s4可包括如下步驟:
4.根據權利要求3所述的一種風力發電機葉片清洗方法,其特征在于,s41-s44循環執行,直到所述第一差值和所述第二差值滿足預設范圍。
5.根據權利要求1所述的一種風力發電機葉片清洗方法,其特征在于,在s5后還包括如下步驟:
6.根據權利要求1所述的一種風力發電機葉片清洗方法,其特征在于,在s5后還包括如下步驟:
7.根據權利要求1所述的一種風力發電機葉片清洗方法,其特征在于,在s5后還包括如下步驟:
8.一種無人機,其特征在于,包括:主體,還包括包括:設置與所述主體的清潔劑箱、水箱、扇形噴頭和攝像頭,所述清潔劑箱和所述水箱通過不同的管道連通所述扇形噴頭;
技術總結
本發明公開了一種風力發電機葉片清洗方法及無人機,所述的清洗方法由無人機執行清洗工作,所述的清洗方法包括如下步驟:S1:控制風力發電機葉片停在預設位置;S2:向所述無人機輸入飛行信息,所述飛行信息包括由若干點位組成的飛行路徑,還包括與各所述點位一一對應的標準圖,還包括與各所述點位一一對應的噴頭開口尺寸,所述標準圖上配置有風力發電機的部分圖片;S3:控制所述無人機飛行至所述點位;S4:控制所述攝像頭拍攝風力發電機葉獲取,并通過所述標準圖片調整所述無人機的位置;S5:控制所述無人機對風力發電機葉片進行清洗。
技術研發人員:周金國,崔書珍
受保護的技術使用者:重慶工程職業技術學院
技術研發日:
技術公布日:2024/11/4
- 還沒有人留言評論。精彩留言會獲得點贊!