一種立式混合機槳葉的自動清理裝置的制作方法
本技術涉及復合固體推進劑生產,具體涉及一種立式混合機槳葉的自動清理裝置。
背景技術:
1、立式混合機是生產復合固體推進劑等含能材料必不可少的關鍵設備,在其內部安裝有兩個相互嚙合的槳葉,按照距離中心軸線的遠近分別稱為近心槳、遠心槳。兩個槳葉自轉的同時圍繞中心軸線公轉,兩個槳葉之間、槳葉與混合鍋鍋壁之間的間隙均為毫米級,立式混合機通過兩個槳葉之間強大的剪切力將物料混合均勻。由于采取了特殊的齒輪系統設計,立式混合機槳葉旋轉的姿態及位置不會完全重復,從而確保了立式混合機能夠將混合鍋內任意位置的物料都混合均勻。
2、由于立式混合機的槳葉結構復雜,在混合出料后殘留的藥漿容易粘附在槳葉上,并且必須將槳葉上的藥漿倒入混合鍋內繼續參與混合,常規的化學溶劑清理法、氣流清理法等均不適用于立式混合機的槳葉清理。目前行業內普遍采用人工面對面使用刮板清理的方式完成槳葉清理作業,這些殘留藥漿人工難以清理且危險性較大,作業準備時間長,影響物料制備效率。
3、為了解決復合固體推進劑立式混合過程中普遍存在的手工面對面清理槳葉的共性安全隱患問題,使用工業防爆機器人代替人工在遠程完成槳葉自動清理作業。對槳葉位姿識別、機器人軌跡自動規劃等技術進行研究,通過融合多傳感信息、槳葉定點停車、機器人運動控制等技術,實現槳葉自動清理,完成混合過程槳葉清理作業的遠程隔離操作,提高復合固體推進劑生產的本質安全度和成產效率。但是,使用工業防爆機器人清理時,要求槳葉停在最佳位置,且刮板軌跡較為固定,自適應能力不足。
技術實現思路
1、針對上述問題,本實用新型的目的是提供一種立式混合機槳葉的自動清理裝置,通過槳葉自動控制定點停車,實現遠程一鍵式完成槳葉清理。
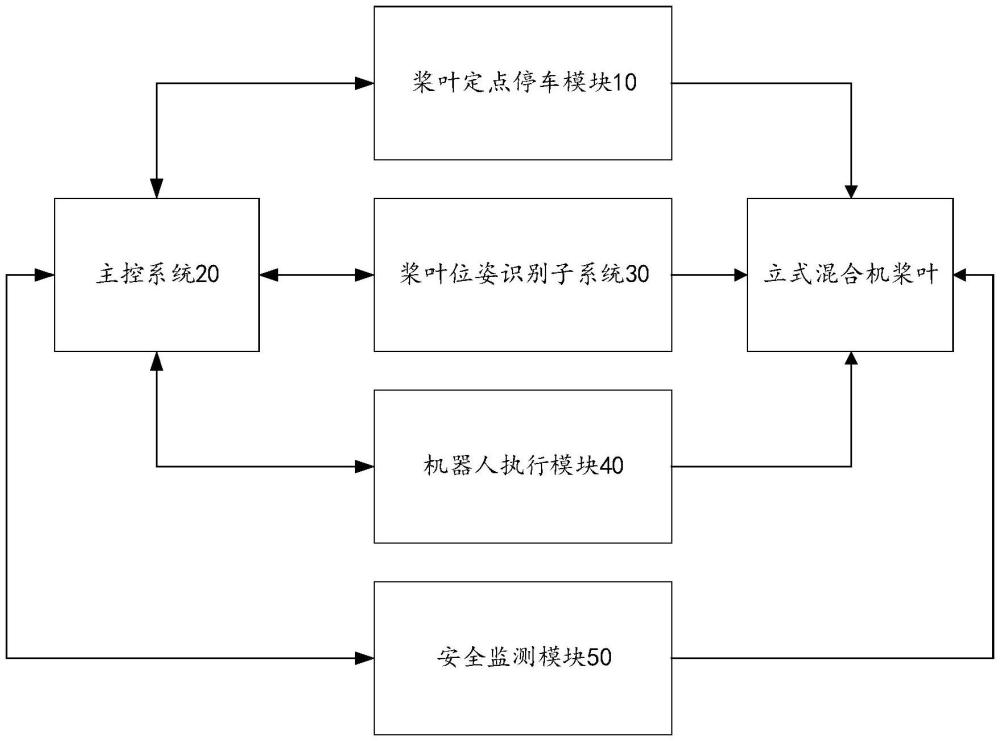
2、本實用新型提供了一種立式混合機槳葉的自動清理裝置,包括:槳葉定點停車模塊、主控系統、槳葉位姿識別子系統、機器人執行模塊、安全監測模塊;
3、所述主控系統與所述槳葉定點停車模塊、槳葉位姿識別子系統、機器人執行模塊、安全監測模塊分別連接;
4、所述槳葉定點停車模塊用于控制立式混合機槳葉在指定位置停止;
5、所述槳葉位姿識別子系統用于識別立式混合機槳葉的槳葉位姿;
6、所述安全監測模塊用于采集清理過程中立式混合機槳葉的溫度和視頻;
7、所述機器人執行模塊用于對所述立式混合機槳葉清理;
8、所述主控系統用于根據所述槳葉位姿確定清理軌跡,控制所述機器人執行模塊根據所述清理軌跡清理;以及根據清理過程中立式混合機槳葉的溫度和視頻確定是否異常,控制所述立式混合機槳葉啟停。
9、在一種可能的實現方式中,所述立式混合機槳葉包括遠心槳和近心槳;在遠心槳和近心槳槳軸上分段標記不同的顏色,遠心槳和近心槳的不同槳軸顏色組合對應遠心槳和近心槳不同的旋轉姿態及位置。
10、在一種可能的實現方式中,所述遠心槳的槳軸顏色小于等于24;所述近心槳的槳軸顏色小于等于24。
11、在一種可能的實現方式中,所述槳葉定點停車模塊包括:防爆顏色定位傳感器、液壓旋轉回路和控制系統;
12、所述防爆顏色定位傳感器安裝在所述遠心槳和近心槳周圍;所述防爆顏色定位傳感器與所述控制系統連接;所述控制系統通過所述液壓旋轉回路與所述遠心槳和所述近心槳連接;
13、在立式混合機運行過程中,所述遠心槳和近心槳上部的圓周面分別自轉并同時圍繞中心軸線公轉;
14、所述防爆顏色定位傳感器用于實時檢測所述遠心槳和近心槳上部的圓周面上的槳軸顏色,并發送給控制系統;
15、所述控制系統用于當所述遠心槳和近心槳上部的圓周面上的槳軸顏色為預定顏色組合時,向液壓旋轉回路發送停車指令,以關閉液壓旋轉回路的油路,以及控制立式混合機槳葉停止旋轉。
16、在一種可能的實現方式中,所述槳葉位姿識別子系統包括:投影機和相機;
17、所述投影機用于生成連續的條紋圖片,并將所述條紋圖片投影至立式混合機槳葉上;
18、所述相機所述后端將所述槳葉點云圖像與原始槳葉3d數模進行對齊比對,得到槳葉偏差;
19、所述后端通過圖像處理算法計算所述槳葉圖片中每個像素的坐標得到槳葉的三維點云,以及根據所述三維點云識別槳葉位姿,并將識別結果發送給所述主控系統,以使所述主控系統根據所述識別結果確認清理軌跡。
20、在一種可能的實現方式中,所述機器人執行模塊包括:懸臂梁、機器人、末端執行器和運動控制器;
21、所述機器人安裝于所述懸臂梁的導軌上,所述末端執行器安裝于所述機器人末端的法蘭上,所述運動控制器安裝在現場設置的防爆箱內,通過光纖將數據傳送給放置在控制間的主控系統。
22、在一種可能的實現方式中,所述末端執行器具有柔性。
23、在一種可能的實現方式中,所述懸臂梁包括:懸臂梁底座、懸臂梁轉臺、配重和導軌;
24、所述懸臂梁底座安裝于地面,用于固定;
25、所述懸臂梁轉臺套設在所述懸臂梁底座上,用于在兩個限位內的預設角度中旋轉;
26、當所述懸臂梁轉臺旋轉至第一限位后鎖死,所述機器人隨即進行相關作業;當所述機器人作業停止時,所述懸臂梁轉臺旋轉至其他位置;
27、所述導軌固定在所述懸臂梁轉臺上方,用于為所述機器人提供一個移動自由度;
28、所述配重滑設在所述導軌上,用于為所述懸臂梁上的機器人提供平衡。
29、在一種可能的實現方式中,所述安全監測模塊包括:紅外熱像儀和防爆攝像頭;
30、所述紅外熱像儀用于采集清理過程的溫度,并將所述溫度發送給所述主控系統;
31、所述防爆攝像頭用于采集清理現場的視頻,并通過光纖將所述視頻發送到顯示器,以便用戶監視槳葉清理過程及判斷所述機器人的位置及槳葉上的藥劑是否清理干凈。
32、本實用新型實施例提供的立式混合機槳葉的自動清理裝置,通過槳葉自動控制定點停車,縮短槳葉清理時間,實現混合過程清理自動化以及無人化。
技術特征:
1.一種立式混合機槳葉的自動清理裝置,其特征在于,包括:槳葉定點停車模塊(10)、主控系統(20)、槳葉位姿識別子系統(30)、機器人執行模塊(40)、安全監測模塊(50);
2.根據權利要求1所述自動清理裝置,其特征在于,所述立式混合機槳葉包括遠心槳(1)和近心槳(2);在遠心槳(1)和近心槳(2)槳軸上分段標記不同的顏色,遠心槳(1)和近心槳(2)的不同槳軸顏色組合對應遠心槳(1)和近心槳(2)不同的旋轉姿態及位置。
3.根據權利要求2所述自動清理裝置,其特征在于,所述遠心槳(1)的槳軸顏色小于等于24;所述近心槳(2)的槳軸顏色小于等于24。
4.根據權利要求2所述自動清理裝置,其特征在于,所述槳葉定點停車模塊(10)包括:防爆顏色定位傳感器(12)、液壓旋轉回路(13)和控制系統(14);
5.根據權利要求1所述自動清理裝置,其特征在于,所述槳葉位姿識別子系統(30)包括:投影機(31)和相機(32);
6.根據權利要求1所述自動清理裝置,其特征在于,所述機器人執行模塊(40)包括:懸臂梁(41)、機器人(42)、末端執行器(43)和運動控制器(44);
7.根據權利要求6所述自動清理裝置,其特征在于,所述末端執行器(43)具有柔性。
8.根據權利要求6所述自動清理裝置,其特征在于,所述懸臂梁(41)包括:懸臂梁底座(411)、懸臂梁轉臺(412)、配重(413)和導軌(414);
9.根據權利要求1所述自動清理裝置,其特征在于,所述安全監測模塊(50)包括:紅外熱像儀(51)和防爆攝像頭(52);
技術總結
本技術涉及復合固體推進劑生產技術領域,具體公開了一種立式混合機槳葉的自動清理裝置,包括:槳葉定點停車模塊(10)、主控系統(20)、槳葉位姿識別子系統(30)、機器人執行模塊(40)、安全監測模塊(50);槳葉定點停車模塊(10)用于控制立式混合機槳葉在指定位置停止;槳葉位姿識別子系統(30)用于識別立式混合機槳葉的槳葉位姿;安全監測模塊(50)用于采集清理過程中立式混合機槳葉的溫度和視頻;機器人執行模塊(40)用于對立式混合機槳葉清理;主控系統(20)用于根據槳葉位姿確定清理軌跡,控制機器人執行模塊(40)根據清理軌跡清理;以及根據清理過程中立式混合機槳葉的溫度和視頻確定是否異常,控制立式混合機槳葉啟停。
技術研發人員:曾慶林,周宣赤,劉嵩,樊鑫云,鄭逸文,朱鳳朝,賈明剛,喬輝,曹宇,董雷
受保護的技術使用者:湖北航天化學技術研究所
技術研發日:20240130
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!