基于車廂余煤智能清理的負壓輸送極坐標機器人的制作方法
本技術屬于余煤清理,尤其涉及基于車廂余煤智能清理的負壓輸送極坐標機器人。
背景技術:
1、來煤接卸一般由翻車機系統或螺旋卸車系統來承擔。車皮余煤清理仍然采用常規的人工清理方式,清理人員將車廂門打開,進入車廂內后,用鐵鍬和掃把將車廂內的余煤清掃下來,再從車廂側門掃出,散落在火車軌道旁邊或落入卸煤溝。余煤清理完畢需要將火車車廂側門重新密封,車門搭扣一般采用鋼筋防松,作業流程比較繁瑣、效率低。最后將清掃下來散落在火車軌道旁邊的煤收集起來運走,清理方式落后,消耗大量人力,人員在車皮爬進爬出,存有很大的安全隱患,越來越少的人愿意去做清車底工作,成本越來越高。并且不可避免的形成不同程度的二次污染。這種人工余煤清理方式存在以下問題:一是在多雨季節火車車廂中水分增加黏度增大導致車皮卸車后余煤量增多,費時、費力、費工;二是在冬季凍煤清理時不僅清理難度大,而且極易對車皮劃傷;三是在余煤清理時,因余煤水分高低變化很大,清理收集清掃轉運時,極易引起揚塵形成污染或堵塞輸送設備。
技術實現思路
1、本實用新型提出了基于車廂余煤智能清理的負壓輸送極坐標機器人。
2、為了實現上述目的,本實用新型采用了如下技術方案:
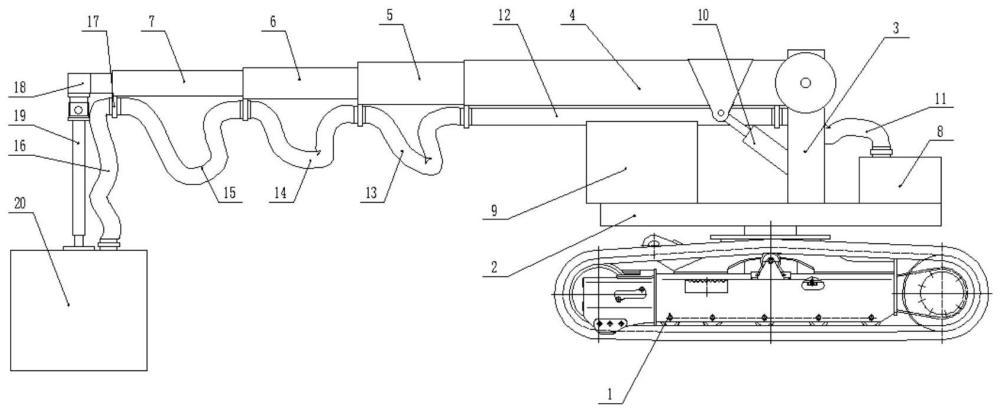
3、基于車廂余煤智能清理的負壓輸送極坐標機器人,包括感知系統、控制系統、驅動系統和機械系統,所述感知系統包括用于識別車號的攝像頭,所述控制系統與感知系統、驅動系統相連接,所述驅動系統用于驅動機械系統,所述機械系統包括底座,所述底座上部裝有旋轉平臺,所述旋轉平臺上裝有升高支架,所述升高支架上部裝有行走大臂,所述行走大臂與升降液壓缸的活塞鉸接,所述升降液壓缸末端與升高支架鉸接,所述行走大臂內套裝有若干移動小臂,所述移動小臂前端固定有連接器,所述連接器與伸縮手臂鉸接,所述伸縮手臂末端裝有清理裝置,每個移動小臂下部裝有一個連接頭,所述行走大臂下部裝有兩個連接頭,相鄰的兩個連接頭之間通過吸料管相連接,所述吸料管與清理裝置相連接,所述旋轉平臺上裝有液壓系統和負壓吸料系統,所述負壓吸料系統與吸料管相連接。
4、進一步的,所述移動小臂有兩個。
5、進一步的,所述移動小臂設有三個,包括移動小臂一、移動小臂二、移動小臂三,所述移動小臂一裝在行走大臂內,所述移動小臂二裝在移動小臂一內,所述移動小臂三裝在移動小臂二內,所述移動小臂一前端裝有滑輪一,所述移動小臂二前端裝有滑輪二,所述移動小臂一內部末端裝有滑輪四,所述移動小臂二內部末端裝有滑輪三,所述行走大臂前端裝有鋼絲固定件二,所述鋼絲固定件二中固定有鋼絲繩二,所述鋼絲繩二搭在滑輪一上,之后所述鋼絲繩二搭在移動小臂二外部的轉換輪二上,之后所述鋼絲繩二搭在移動小臂一內的轉換輪一上,之后所述鋼絲繩二搭在滑輪三上,最后固定在所述移動小臂三內的鋼絲固定件六上,所述移動小臂一前端固定有鋼絲固定件三,所述鋼絲固定件三內固定有鋼絲繩三,所述鋼絲繩三搭在滑輪二上,所述鋼絲繩三末端固定在移動小臂三外部的鋼絲固定件五上,所述行走大臂內固定有鋼絲固定件一,所述鋼絲固定件一中固定有鋼絲繩一,所述鋼絲繩一搭在滑輪四上,所述鋼絲繩一末端固定在移動小臂二內的鋼絲固定件四,所述移動小臂一內部與液壓活塞連接,所述液壓活塞設置在伸縮液壓缸內,所述伸縮液壓缸末端裝在伸縮小臂三內。
6、進一步的,所述移動小臂二內部固定有兩個導向滑輪,兩個導向滑輪將伸縮液壓缸夾在其中。
7、進一步的,所述移動小臂二內部固定有托輪,所述托輪設置在伸縮液壓缸下方。
8、進一步的,所述行走大臂末端設置有連接支架一,所述連接支架一通過銷軸與升高支架相連接。
9、進一步的,所述行走大臂外部設置有連接支架二,所述連接支架二與升降液壓缸的活塞通過銷軸鉸接。
10、進一步的,所述移動小臂一前端下側固定有連接頭,所述移動小臂二前端下側固定有連接頭,所述移動小臂三前端下側固定有連接頭,所述行走大臂下側固定有兩個連接頭,移動大臂的兩個連接頭之間裝有吸料管二,所述移動大臂的一個連接頭通過吸料管一與負壓吸料系統相連接,所述移動大臂的另一個連接頭與吸料管三的一端相連接,所述吸料管三的另一端與移動小臂一的連接頭相連接,所述移動小臂一的連接頭與吸料管四相連接,所述吸料管四的另一端與移動小臂二上的連接頭相連接,所述移動小臂二的連接頭與吸料管五的一端相連接,所述吸料管五的另一端與移動小臂三上的連接頭相連接,所述移動小臂三的連接頭通過吸料管六與清理裝置相連接。
11、進一步的,所述連接器包括支撐桿,所述支撐桿上固定有連接桿,所述連接桿與移動小臂末端固定連接,所述支撐桿下端設置有若干連接叉,所述連接叉與伸縮手臂通過銷軸鉸接。
12、有益之處:本實用新型通過極坐標機器人帶動清理裝置往復運動來機械清理凍余煤,能夠碾碎清理車幫、車底的凍煤粘煤,可以完成余煤自動清掃,節省大量人力物力,消除二次污染。
技術特征:
1.基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:包括底座,包括感知系統、控制系統、驅動系統和機械系統,所述感知系統包括用于識別車號的攝像頭,所述控制系統與感知系統、驅動系統相連接,所述驅動系統用于驅動機械系統,所述機械系統包括底座,所述底座上部裝有旋轉平臺,所述旋轉平臺上裝有升高支架,所述升高支架上部裝有行走大臂,所述行走大臂與升降液壓缸的活塞鉸接,所述升降液壓缸末端與升高支架鉸接,所述行走大臂內套裝有若干移動小臂,所述移動小臂前端固定有連接器,所述連接器與伸縮手臂鉸接,所述伸縮手臂末端裝有清理裝置,每個移動小臂下部裝有一個連接頭,所述行走大臂下部裝有兩個連接頭,相鄰的兩個連接頭之間通過吸料管相連接,所述吸料管與清理裝置相連接,所述旋轉平臺上裝有液壓系統和負壓吸料系統,所述負壓吸料系統與吸料管相連接。
2.根據權利要求1所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述移動小臂有兩個。
3.根據權利要求1所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述移動小臂設有三個,包括移動小臂一、移動小臂二、移動小臂三,所述移動小臂一裝在行走大臂內,所述移動小臂二裝在移動小臂一內,所述移動小臂三裝在移動小臂二內,所述移動小臂一前端裝有滑輪一,所述移動小臂二前端裝有滑輪二,所述移動小臂一內部末端裝有滑輪四,所述移動小臂二內部末端裝有滑輪三,所述行走大臂前端裝有鋼絲固定件二,所述鋼絲固定件二中固定有鋼絲繩二,所述鋼絲繩二搭在滑輪一上,之后所述鋼絲繩二搭在移動小臂二外部的轉換輪二上,之后所述鋼絲繩二搭在移動小臂一內的轉換輪一上,之后所述鋼絲繩二搭在滑輪三上,最后固定在所述移動小臂三內的鋼絲固定件六上,所述移動小臂一前端固定有鋼絲固定件三,所述鋼絲固定件三內固定有鋼絲繩三,所述鋼絲繩三搭在滑輪二上,所述鋼絲繩三末端固定在移動小臂三外部的鋼絲固定件五上,所述行走大臂內固定有鋼絲固定件一,所述鋼絲固定件一中固定有鋼絲繩一,所述鋼絲繩一搭在滑輪四上,所述鋼絲繩一末端固定在移動小臂二內的鋼絲固定件四,所述移動小臂一內部與液壓活塞連接,所述液壓活塞設置在伸縮液壓缸內,所述伸縮液壓缸末端裝在伸縮小臂三內。
4.根據權利要求3所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述移動小臂二內部固定有兩個導向滑輪,兩個導向滑輪將伸縮液壓缸夾在其中。
5.根據權利要求3所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述移動小臂二內部固定有托輪,所述托輪設置在伸縮液壓缸下方。
6.根據權利要求3所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述行走大臂末端設置有連接支架一,所述連接支架一通過銷軸與升高支架相連接。
7.根據權利要求3所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述行走大臂外部設置有連接支架二,所述連接支架二與升降液壓缸的活塞通過銷軸鉸接。
8.根據權利要求3所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述移動小臂一前端下側固定有連接頭,所述移動小臂二前端下側固定有連接頭,所述移動小臂三前端下側固定有連接頭,所述行走大臂下側固定有兩個連接頭,移動大臂的兩個連接頭之間裝有吸料管二,所述移動大臂的一個連接頭通過吸料管一與負壓吸料系統相連接,所述移動大臂的另一個連接頭與吸料管三的一端相連接,所述吸料管三的另一端與移動小臂一的連接頭相連接,所述移動小臂一的連接頭與吸料管四相連接,所述吸料管四的另一端與移動小臂二上的連接頭相連接,所述移動小臂二的連接頭與吸料管五的一端相連接,所述吸料管五的另一端與移動小臂三上的連接頭相連接,所述移動小臂三的連接頭通過吸料管六與清理裝置相連接。
9.根據權利要求1所述的基于車廂余煤智能清理的負壓輸送極坐標機器人,其特征在于:所述連接器包括支撐桿,所述支撐桿上固定有連接桿,所述連接桿與移動小臂末端固定連接,所述支撐桿下端設置有若干連接叉,所述連接叉與伸縮手臂通過銷軸鉸接。
技術總結
本技術屬于余煤清理技術領域,尤其涉及基于車廂余煤智能清理的負壓輸送極坐標機器人,感知系統包括用于識別車號的攝像頭,控制系統與感知系統、驅動系統相連接,驅動系統用于驅動機械系統,底座上部裝有旋轉平臺,旋轉平臺上裝有升高支架,升高支架上部裝有行走大臂,行走大臂與升降液壓缸的活塞鉸接,升降液壓缸末端與升高支架鉸接,行走大臂內套裝有若干移動小臂,連接器與伸縮手臂鉸接,伸縮手臂末端裝有清理裝置,每個移動小臂下部裝有一個連接頭,行走大臂下部裝有兩個連接頭,相鄰的兩個連接頭之間通過吸料管相連接,吸料管與清理裝置相連接,旋轉平臺上裝有液壓系統和負壓吸料系統,負壓吸料系統與吸料管相連接。
技術研發人員:王偉,董超,張洪言,張良,程兆勇
受保護的技術使用者:山東英電環保科技有限公司
技術研發日:20240301
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!