巡檢機器人垂直升降換軌裝置的制作方法
本技術涉及機器人,特別是巡檢機器人垂直升降換軌裝置。
背景技術:
1、巡檢機器人的行走路線中經常會存在分叉的線路,為完成自主巡檢,巡檢機器人行走軌道需要配備換軌機構,以實現從其中一個運行軌道跨越至另外一個運行軌道的換軌功能。然而,目前巡檢機器人換軌機構通常為水平平移換軌,導致軌道鋪設模式較為單一,且巡檢機器人的體積較大,換軌過程中容易與周圍的部件發生干涉,影響巡檢機器人正常工作。
2、對此,本實用新型提出巡檢機器人垂直升降換軌裝置,予以解決。
技術實現思路
1、本實用新型的目的旨在至少解決所述技術缺陷之一。
2、為此,本實用新型的一個目的在于提出巡檢機器人垂直升降換軌裝置,以解決背景技術中所提到的問題,克服現有技術中存在的不足。
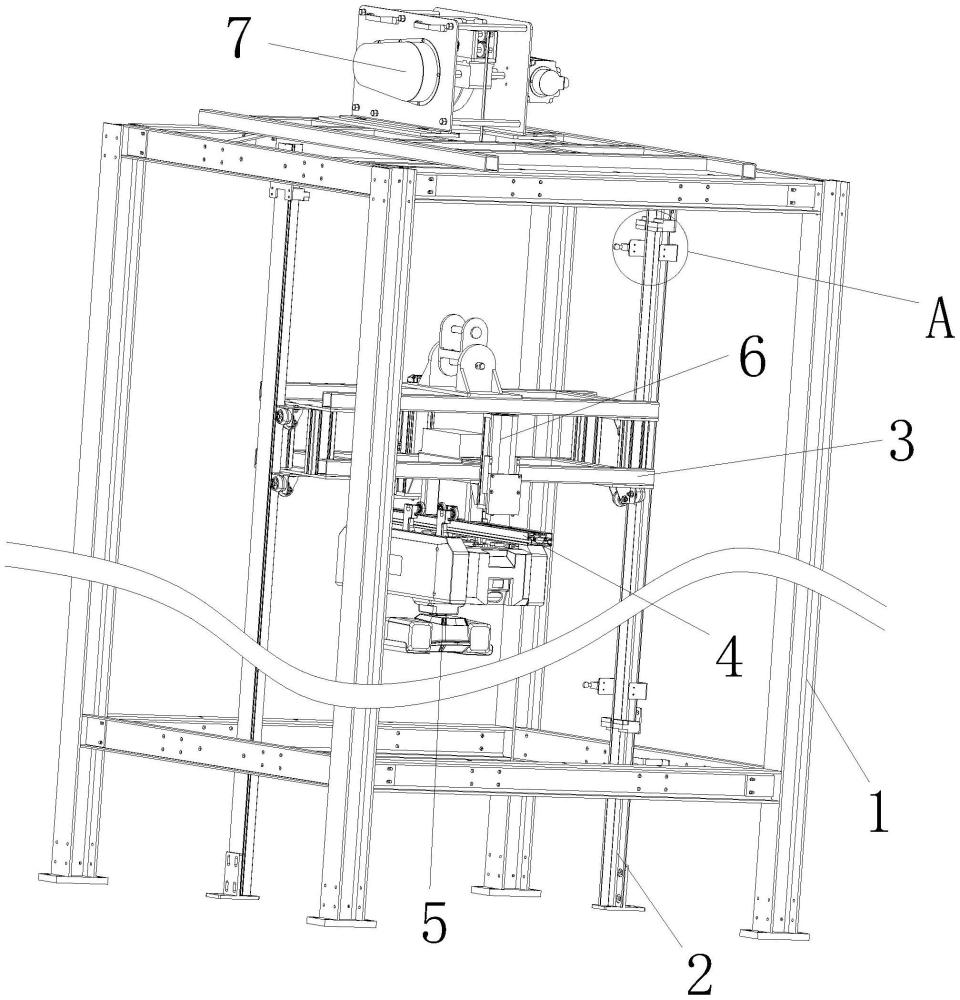
3、為了實現上述目的,本實用新型一方面的實施例提供巡檢機器人垂直升降換軌裝置,包括支架,所述支架的內部固定安裝有兩個滑道,兩個所述滑道之間滑動連接有一個升降架,所述升降架的一側固定安裝有一個升降軌道,所述升降軌道的外部活動安裝有一個巡檢機器人,所述升降架的兩側均固定安裝有一個安防組件,所述支架的頂部固定安裝有一個收卷組件,其中一個所述滑道的一側固定安裝有兩個限位組件。
4、由上述任一方案優選的是,所述升降架的兩側均固定安裝有兩個滾輪連接架,四個所述滾輪連接架的一側均轉動連接有一個第一滾輪,四個所述滾輪連接架的一側均轉動連接有兩個第二滾輪,若干所述第二滾輪和第一滾輪的外表面均搭接于對應的滑道的外表面。
5、由上述任一方案優選的是,所述安防組件包括電動滑軌,所述電動滑軌的一側固定安裝于升降架的一側,所述電動滑軌的輸出端固定安裝有一個擋板,所述擋板的底部固定連接有兩個定位柱。
6、由上述任一方案優選的是,所述升降軌道通過螺栓固定安裝于升降架的一側,所述升降軌道的頂部開設有四個定位孔。
7、由上述任一方案優選的是,所述定位柱的形狀和大小與定位孔的形狀和大小相適配,所述定位柱的外部插接于對應的定位孔的內部。
8、采用上述方案達到的技術效果是:提升裝置的安全性。
9、由上述任一方案優選的是,所述收卷組件包括收卷座,所述收卷座的一側固定安裝有一個減速電機,所述減速電機的輸出端固定安裝有一個收卷輥,所述收卷輥的外部轉動連接于收卷座的內部,所述收卷座的內部轉動連接有一個往復絲杠,所述往復絲杠的外表面螺紋連接有一個導向座,所述導向座的內部轉動連接有若干導向輪。
10、由上述任一方案優選的是,所述導向座的內部滑動連接有一個導向桿,所述導向桿的兩側固定安裝于導向座的內部,所述往復絲杠和收卷輥的一側均固定安裝有一個帶輪,兩個所述帶輪通過皮帶轉動連接。
11、采用上述方案達到的技術效果是:便于均勻的收納鋼絲繩。
12、由上述任一方案優選的是,所述收卷輥的外部纏繞有鋼絲繩,所述鋼絲繩的一側固定安裝于升降架的一側,所述鋼絲繩的一側搭接于對應的導向輪的外部。
13、采用上述方案達到的技術效果是:便于帶動升降軌道升降。
14、由上述任一方案優選的是,所述限位組件包括一個限位板,所述限位板通過螺栓固定安裝于滑道的一側,且所述限位組件還包括一個限位開關,所述限位開關通過螺栓固定安裝于滑道的一側。
15、采用上述方案達到的技術效果是:用于限位,并保證精準換軌。
16、與現有技術相比,本實用新型所具有的優點和有益效果為:
17、本實用新型通過限位組件的設置,能夠保證升降軌道移動到位后的精度,能夠便于巡檢機器人更加平穩的進行換軌工作,通過往復絲杠能夠再升降過程中,提升鋼絲繩收放的更加穩定,進而提升垂直換軌過程中的穩定性,安防組件能夠在換軌過程中,進一步的對巡檢機器人進行防護,且整個換軌過程巡檢機器人始終位于支架的內部,能夠有效避免換軌過程中與周圍的部件發生干涉,保證了該垂直升降換軌裝置工作中的穩定性和安全性。
18、本實用新型附加的方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本實用新型的實踐了解到。
技術特征:
1.巡檢機器人垂直升降換軌裝置,其特征在于:包括支架(1),所述支架(1)的內部固定安裝有兩個滑道(2),兩個所述滑道(2)之間滑動連接有一個升降架(3),所述升降架(3)的一側固定安裝有一個升降軌道(4),所述升降軌道(4)的外部活動安裝有一個巡檢機器人(5),所述升降架(3)的兩側均固定安裝有一個安防組件(6),所述支架(1)的頂部固定安裝有一個收卷組件(7),其中一個所述滑道(2)的一側固定安裝有兩個限位組件。
2.根據權利要求1所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述升降架(3)的兩側均固定安裝有兩個滾輪連接架(31),四個所述滾輪連接架(31)的一側均轉動連接有一個第一滾輪(32),四個所述滾輪連接架(31)的一側均轉動連接有兩個第二滾輪(33),若干所述第二滾輪(33)和第一滾輪(32)的外表面均搭接于對應的滑道(2)的外表面。
3.根據權利要求2所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述安防組件(6)包括電動滑軌(61),所述電動滑軌(61)的一側固定安裝于升降架(3)的一側,所述電動滑軌(61)的輸出端固定安裝有一個擋板(62),所述擋板(62)的底部固定連接有兩個定位柱(63)。
4.根據權利要求3所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述升降軌道(4)通過螺栓固定安裝于升降架(3)的一側,所述升降軌道(4)的頂部開設有四個定位孔(41)。
5.根據權利要求4所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述定位柱(63)的形狀和大小與定位孔(41)的形狀和大小相適配,所述定位柱(63)的外部插接于對應的定位孔(41)的內部。
6.根據權利要求5所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述收卷組件(7)包括收卷座(71),所述收卷座(71)的一側固定安裝有一個減速電機(72),所述減速電機(72)的輸出端固定安裝有一個收卷輥(73),所述收卷輥(73)的外部轉動連接于收卷座(71)的內部,所述收卷座(71)的內部轉動連接有一個往復絲杠(74),所述往復絲杠(74)的外表面螺紋連接有一個導向座(75),所述導向座(75)的內部轉動連接有若干導向輪。
7.根據權利要求6所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述導向座(75)的內部滑動連接有一個導向桿(76),所述導向桿(76)的兩側固定安裝于導向座(75)的內部,所述往復絲杠(74)和收卷輥(73)的一側均固定安裝有一個帶輪,兩個所述帶輪通過皮帶轉動連接。
8.根據權利要求7所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述收卷輥(73)的外部纏繞有鋼絲繩,所述鋼絲繩的一側固定安裝于升降架(3)的一側,所述鋼絲繩的一側搭接于對應的導向輪的外部。
9.根據權利要求8所述的巡檢機器人垂直升降換軌裝置,其特征在于:所述限位組件包括一個限位板(8),所述限位板(8)通過螺栓固定安裝于滑道(2)的一側,且所述限位組件還包括一個限位開關(9),所述限位開關(9)通過螺栓固定安裝于滑道(2)的一側。
技術總結
本技術涉及機器人技術領域,特別是巡檢機器人垂直升降換軌裝置,包括支架,所述支架的內部固定安裝有兩個滑道,兩個所述滑道之間滑動連接有一個升降架,所述升降架的一側固定安裝有一個升降軌道,所述升降軌道的外部活動安裝有一個巡檢機器人,所述升降架的兩側均固定安裝有一個安防組件。本技術的優點在于:本技術通過限位組件的設置,能夠保證升降軌道移動到位后的精度,能夠便于巡檢機器人更加平穩的進行換軌工作,通過往復絲杠能夠再升降過程中,提升鋼絲繩收放的更加穩定,進而提升垂直換軌過程中的穩定性,安防組件能夠在換軌過程中,進一步的對巡檢機器人進行防護,保證了該垂直升降換軌裝置工作中的穩定性和安全性。
技術研發人員:魏杰濤,田子豪,谷玉龍
受保護的技術使用者:北京超維世紀科技有限公司
技術研發日:20240328
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!