上下料機器人的制作方法
本技術涉及機器人,具體而言,涉及一種上下料機器人。
背景技術:
1、隨著市場逐漸成熟,企業使用越來越多托盤進行裝載產品搬運輸送以及組裝上下料,企業也對智能設備有更高的要求;但是現有的用于處理托盤的復合機器人,通常會或多或少地存在以下問題:1.目前復合機器人各功能比較單一,無法實現搬運產品同時兼容搬運托盤以及輸送;2.常規復合機器人定位精度為±1.5mm左右,精度比較低,無法使用在高精度要求的場合;3.市面上實現搬運托盤同時搬運產品以及輸送多是無法移動,比較大型的非標設備,場地利用率比較低;4.目前復合機器人無法兼容功能多樣化以及通用性于一身,功能化程度不夠高。
技術實現思路
1、本實用新型的第一個目的在于提供一種上下料機器人,以解決現有產品取放作業效率低的技術問題。
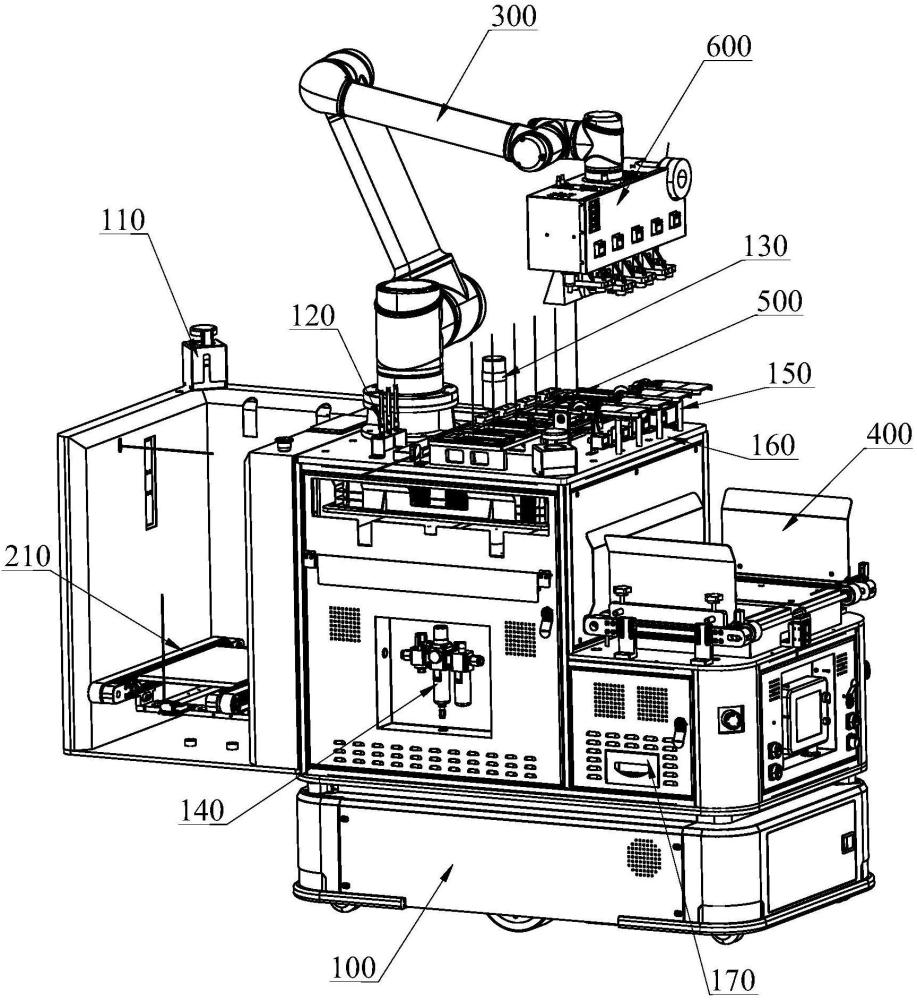
2、本實用新型提供的上下料機器人,包括agv車體、上料裝置、移動機械手和下料裝置,所述上料裝置、所述移動機械手和所述下料裝置安裝于所述agv車體,所述上料裝置用于承接產品,所述移動機械手的動作輸出端安裝有取放機構,所述取放機構用于從所述上料裝置中取出產品并且用于將托盤移動至下料裝置。
3、本實用新型上下料機器人帶來的有益效果是:
4、通過將上料裝置、移動機械手和下料裝置都設置于agv車體,可以實現上料裝置接收載有托盤的產品之后,在agv車體前進過程中,移動機械手從上料裝置中取產品并放置,以備產品在上下料機器人與工位之間轉換。而且,可以實現將托盤移動至下料裝置的作業。從而,可以在agv車體移動過程中進行多個輔助操作,提高作業效率,減少了作業時間。
5、可選的技術方案中,所述上料裝置包括上料皮帶機構和升降機構,所述上料皮帶機構安裝于所述升降機構的動力輸出端,所述升降機構包括線性升降組件和升降導向組件,所述升降導向組件包括第一直線導軌,所述上料皮帶機構與所述線性升降組件傳動連接,且與所述第一直線導軌相對活動設置。
6、可選的技術方案中,所述升降機構設有第一傳感器,所述第一傳感器用于檢測所述上料皮帶機構的運動位置;所述上料裝置還包括側推定位組件,所述側推定位組件包括第五傳感器,所述第五傳感器用于檢測所述上料皮帶機構是否運動至所述升降機構的上部,所述側推定位組件用于在所述第五傳感器檢測到所述上料皮帶機構運動至所述升降機構的上部時夾緊所述托盤。
7、可選的技術方案中,所述取放機構包括取放基板、真空發生器和多個吸附組件,所述取放基板與機械手安裝板相對固定設置,所述機械手安裝板固定連接于所述移動機械手的動作輸出端;所述吸附組件固定安裝于所述取放基板,所述吸附組件還連通安裝在所述取放基板上的所述真空發生器。
8、可選的技術方案中,所述吸附組件包括吸附氣缸、固定連接于所述吸附氣缸的動作輸出端的活動塊、與所述活動塊在豎直方向相對活動設置的吸盤安裝座和安裝于所述吸盤安裝座上的真空吸盤,所述吸盤安裝座與所述活動塊之間設有彈性緩沖件。
9、可選的技術方案中,所述吸附組件還包括安裝基座,所述安裝基座固定連接于所述取放基板,所述吸盤安裝座與所述安裝基座相對活動設置,所述安裝基座上設有第一限位塊,所述第一限位塊用于限制所述活動塊的向上移動極限位置。
10、可選的技術方案中,所述上下料機器人還包括定位裝置,所述定位裝置包括定位治具和橫向定位機構、縱向定位機構,所述定位治具與所述agv車體相對固定設置,所述定位治具的上表面設有定位凹槽,所述橫向定位機構和所述縱向定位機構設置于所述agv車體,所述橫向定位機構和所述縱向定位機構用于從垂直的兩個水平方向在所述定位治具上推動所述產品。
11、可選的技術方案中,所述橫向定位機構包括橫向定位驅動件、橫向定位傳動組件、橫向定位塊和橫向定位導向組件;所述橫向定位驅動件安裝于所述agv車體,所述橫向定位傳動組件包括第一傳動輪、第二傳動輪、傳動帶、傳動梁和夾持所述傳動帶的夾持件,所述傳動帶繞過所述第一傳動輪和所述第二傳動輪,所述夾持件和所述橫向定位塊固定安裝于所述傳動梁;所述第一傳動輪和所述第二傳動輪皆與所述agv車體相對轉動設置;所述橫向定位導向組件包括第二直線導軌,所述第二直線導軌與所述agv車體相對固定設置,所述第二直線導軌與所述傳動梁相對滑動設置。
12、可選的技術方案中,所述定位治具設有通孔部,所述通孔部位于所述定位凹槽中;所述縱向定位機構包括縱向定位塊,所述縱向定位塊與縱向驅動件傳動連接,所述縱向定位塊穿過所述通孔部。
13、可選的技術方案中,所述下料裝置包括下料擋板、下料傳送機構和擋料機構,所述下料傳送機構與所述agv車體相對固定設置,所述擋料機構包括擋料驅動件和傳動連接于所述擋料驅動件的擋料板,所述下料擋板包括多塊擋板,多塊所述擋板位于所述下料傳送機構的上方,且在所述擋板的至少部分高度上,多塊所述擋板圍成的區域自上而下逐漸減小。
技術特征:
1.一種上下料機器人,其特征在于,包括agv車體(100)、上料裝置(200)、移動移動機械手(300)和下料裝置(400),所述上料裝置(200)、所述移動機械手(300)和所述下料裝置(400)安裝于所述agv車體(100),所述上料裝置(200)用于承接產品,所述移動機械手(300)的動作輸出端安裝有取放機構(600),所述取放機構(600)用于從所述上料裝置(200)中取出產品并且用于將托盤移動至下料裝置(400)。
2.根據權利要求1所述的上下料機器人,其特征在于,所述上料裝置(200)包括上料皮帶機構(210)和升降機構(220),所述上料皮帶機構(210)安裝于所述升降機構(220)的動力輸出端,所述升降機構(220)包括線性升降組件和升降導向組件,所述升降導向組件包括第一直線導軌(225),所述上料皮帶機構(210)與所述線性升降組件傳動連接,且與所述第一直線導軌(225)相對活動設置。
3.根據權利要求2所述的上下料機器人,其特征在于,所述升降機構(220)設有第一傳感器(226),所述第一傳感器(226)用于檢測所述上料皮帶機構(210)的運動位置;所述上料裝置(200)還包括側推定位組件(230),所述側推定位組件(230)包括第五傳感器(231),所述第五傳感器(231)用于檢測所述上料皮帶機構(210)是否運動至所述升降機構(220)的上部,所述側推定位組件(230)用于在所述第五傳感器(231)檢測到所述上料皮帶機構(210)運動至所述升降機構(220)的上部時夾緊所述托盤。
4.根據權利要求1所述的上下料機器人,其特征在于,所述取放機構(600)包括取放基板(610)、真空發生器(620)和多個吸附組件(630),所述取放基板(610)與機械手安裝板(650)相對固定設置,所述機械手安裝板(650)固定連接于所述移動機械手(300)的動作輸出端;所述吸附組件(630)固定安裝于所述取放基板(610),所述吸附組件(630)還連通安裝在所述取放基板(610)上的所述真空發生器(620)。
5.根據權利要求4所述的上下料機器人,其特征在于,所述吸附組件(630)包括吸附氣缸(631)、固定連接于所述吸附氣缸(631)的動作輸出端的活動塊(632)、與所述活動塊(632)在豎直方向相對活動設置的吸盤安裝座(633)和安裝于所述吸盤安裝座(633)上的真空吸盤(643),所述吸盤安裝座(633)與所述活動塊(632)之間設有彈性緩沖件(635)。
6.根據權利要求5所述的上下料機器人,其特征在于,所述吸附組件(630)還包括安裝基座(636),所述安裝基座(636)固定連接于所述取放基板(610),所述吸盤安裝座(633)與所述安裝基座(636)相對活動設置,所述安裝基座(636)上設有第一限位塊(637),所述第一限位塊(637)用于限制所述活動塊(632)的向上移動極限位置。
7.根據權利要求1-6中任一項所述的上下料機器人,其特征在于,所述上下料機器人還包括定位裝置(500),所述定位裝置(500)包括定位治具(510)和橫向定位機構(530)、縱向定位機構(520),所述定位治具(510)與所述agv車體(100)相對固定設置,所述定位治具(510)的上表面設有定位凹槽(511),所述橫向定位機構(530)和所述縱向定位機構(520)設置于所述agv車體(100),所述橫向定位機構(530)和所述縱向定位機構(520)用于從垂直的兩個水平方向在所述定位治具(510)上推動所述產品。
8.根據權利要求7所述的上下料機器人,其特征在于,所述橫向定位機構(530)包括橫向定位驅動件、橫向定位傳動組件、橫向定位塊(539)和橫向定位導向組件;所述橫向定位驅動件安裝于所述agv車體(100),所述橫向定位傳動組件包括第一傳動輪(531)、第二傳動輪(532)、傳動帶(533)、傳動梁(534)和夾持所述傳動帶(533)的夾持件(535),所述傳動帶(533)繞過所述第一傳動輪(531)和所述第二傳動輪(532),所述夾持件(535)和所述橫向定位塊(539)固定安裝于所述傳動梁(534);所述第一傳動輪(531)和所述第二傳動輪(532)皆與所述agv車體(100)相對轉動設置;所述橫向定位導向組件包括第二直線導軌(536),所述第二直線導軌(536)與所述agv車體(100)相對固定設置,所述第二直線導軌(536)與所述傳動梁(534)相對滑動設置。
9.根據權利要求7所述的上下料機器人,其特征在于,所述定位治具(510)設有通孔部(512),所述通孔部(512)位于所述定位凹槽(511)中;所述縱向定位機構(520)包括縱向定位塊(521),所述縱向定位塊(521)與縱向驅動件傳動連接,所述縱向定位塊(521)穿過所述通孔部(512)。
10.根據權利要求1-6中任一項所述的上下料機器人,其特征在于,所述下料裝置(400)包括下料擋板(410)、下料傳送機構(420)和擋料機構(430),所述下料傳送機構(420)與所述agv車體(100)相對固定設置,所述擋料機構(430)包括擋料驅動件(431)和傳動連接于所述擋料驅動件(431)的擋料板(432),所述下料擋板(410)包括多塊擋板,多塊所述擋板位于所述下料傳送機構(420)的上方,且在所述擋板的至少部分高度上,多塊所述擋板圍成的區域自上而下逐漸減小。
技術總結
本技術提供了一種上下料機器人,涉及機器人技術領域,以解決產品取放作業效率低的問題。上下料機器人包括AGV車體、上料裝置、移動機械手和下料裝置,上料裝置、移動機械手和下料裝置安裝于AGV車體,上料裝置用于承接產品,移動機械手的動作輸出端安裝有取放機構,取放機構用于從上料裝置中取出產品并且用于將托盤移動至下料裝置。其可以提高產品取放作業效率。
技術研發人員:楊奇,李楊,錢瑞達,鄧凱文,唐文
受保護的技術使用者:思靈機器人科技(長沙)有限責任公司
技術研發日:20240311
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!