一種建筑智能化制造用的搬運裝置的制作方法
本技術涉及建筑材料搬運設備,特別是指一種建筑智能化制造用的搬運裝置。
背景技術:
1、建筑智能化制造搬運裝置指應用先進的信息技術和自動化技術,實現建筑材料智能搬運的目的,隨著社會的發展,建筑智能化制造需要使用的建筑材料愈發廣泛,建筑材料是建筑工程中所應用的各種材料,建筑材料種類繁多,大致分為無機材料、有機材料和復合材料。
2、現有的建筑場地中,在塔吊范圍外,常采用裝有貨箱或托盤的電動車對建筑材料進行搬運,然而在建筑施工初期,由于建筑場地地形復雜,傳統的搬運設備無法將建筑材料直接運送到具有一定高度的位置,影響施工效率。
技術實現思路
1、為了解決背景技術中所存在的在建筑施工初期,由于建筑場地地形復雜,傳統的搬運設備無法將建筑材料直接運送到具有一定高度的位置,影響施工效率的問題,本實用新型提出了一種建筑智能化制造用的搬運裝置。
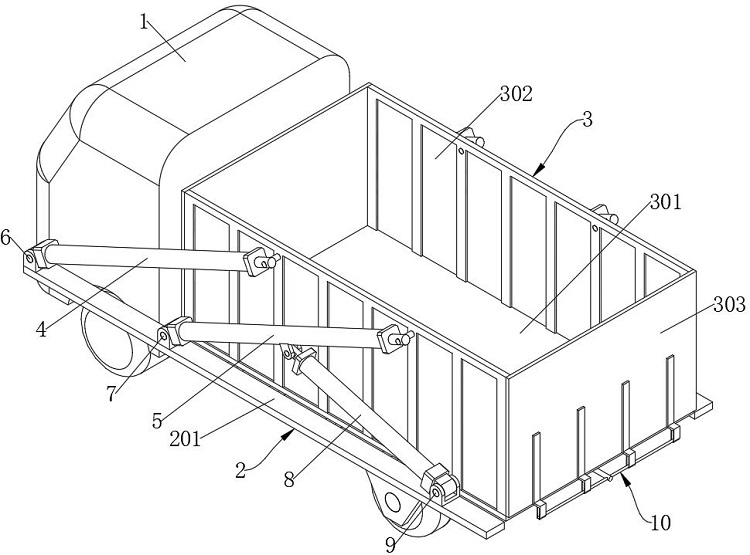
2、本實用新型的技術方案是:一種建筑智能化制造用的搬運裝置,包括搬運車,搬運車上固定設有底盤,底盤上設有位置調節裝置,位置調節裝置上設有貨箱,位置調節裝置用以驅動貨箱升降或沿水平方向左右移動;
3、底盤包括兩個沿左右方向延伸且前后間隔設置的桿件,兩個桿件的前端固定設在搬運車上,兩個桿件上均設有第一鉸接座,位置調節裝置包括鉸接在第一鉸接座上的第一伸縮裝置,第一伸縮裝置能夠通過第一鉸接座前后旋轉,兩個桿件上均設有第二鉸接座,第二鉸接座位于第一鉸接座的右方,第二鉸接座上鉸接有第二伸縮裝置,第二伸縮裝置能夠通過第二鉸接座前后旋轉,第一伸縮裝置與第二伸縮裝置均從上到下、從右到左傾斜設置,且第一伸縮裝置與第二伸縮裝置平行設置;
4、貨箱包括承物板以及固定設在承物板前后兩端的擋板,第一伸縮裝置的頂端鉸接設在擋板的頂端左方,第二伸縮裝置鉸接設在擋板的頂端右方;
5、兩個桿件上均設有第三鉸接座,第三鉸接座位于第二鉸接座的右方,位置調節裝置還包括鉸接在第三鉸接座上的第三伸縮裝置,第三伸縮裝置能夠通過第三鉸接座前后旋轉,第二伸縮裝置的中部固定設有鉸接件,第三伸縮裝置的活塞桿端部通過鉸接件與第二伸縮裝置鉸接。
6、優選的,兩個桿件之間固定設有多個沿前后方向延伸且左右間隔設置的連接桿,貨箱的底部壓靠在連接桿上。
7、優選的,承物板的左右兩端鉸接有箱門,箱門上設有開關門裝置,開關門裝置用以驅動箱門旋轉以打開、關閉貨箱。
8、優選的,開關門裝置包括固定設在承物板左右兩端底部的第四伸縮裝置,第四伸縮裝置的輸出軸端部固定設有沿前后方向延伸的驅動桿;
9、箱門上固定設有沿上下方向延伸的連接板,連接板的底部固定設有連接件,連接件呈l型設置,連接件上開設有前后通透的滑槽,驅動桿滑動穿設在滑槽內。
10、優選的,連接板和連接件均設有多個,多個連接板前后間隔設在箱門上,驅動桿滑動穿設在多個滑槽內。
11、本實用新型的優點:通過同步驅動第一伸縮裝置、第二伸縮裝置的活塞桿能夠帶動貨箱進行升降,通過驅動第三伸縮裝置的活塞桿能夠帶動第一伸縮裝置、第二伸縮裝置在左右方向上旋轉,配合第一伸縮裝置和第二伸縮裝置驅動活塞桿進行伸縮,能夠在帶動貨箱進行升降的前提下,還能夠在水平方向上進行移動至搬運車的前方或底盤的后方,以便于將貨箱快速運送至指定位置,提高施工效率。
技術特征:
1.一種建筑智能化制造用的搬運裝置,其特征在于:包括搬運車(1),搬運車上固定設有底盤(2),底盤(2)上設有位置調節裝置,位置調節裝置上設有貨箱(3),位置調節裝置用以驅動貨箱(3)升降或沿水平方向左右移動;
2.根據權利要求1所述的一種建筑智能化制造用的搬運裝置,其特征在于:兩個桿件(201)之間固定設有多個沿前后方向延伸且左右間隔設置的連接桿(202),貨箱(3)的底部壓靠在連接桿(202)上。
3.根據權利要求1所述的一種建筑智能化制造用的搬運裝置,其特征在于:承物板(301)的左右兩端鉸接有箱門(303),箱門(303)上設有開關門裝置(10),開關門裝置(10)用以驅動箱門(303)旋轉以打開、關閉貨箱(3)。
4.根據權利要求3所述的一種建筑智能化制造用的搬運裝置,其特征在于:開關門裝置(10)包括固定設在承物板(301)左右兩端底部的第四伸縮裝置(101),第四伸縮裝置(101)的輸出軸端部固定設有沿前后方向延伸的驅動桿(102);
5.根據權利要求4所述的一種建筑智能化制造用的搬運裝置,其特征在于:連接板(103)和連接件(104)均設有多個,多個連接板(103)前后間隔設在箱門(303)上,驅動桿(102)滑動穿設在多個滑槽內。
技術總結
本技術提供了一種建筑智能化制造用的搬運裝置,解決了在建筑施工初期,由于建筑場地地形復雜,傳統的搬運設備無法將建筑材料直接運送到具有一定高度的位置,影響施工效率的問題。本技術通過同步驅動第一伸縮裝置、第二伸縮裝置的活塞桿能夠帶動貨箱進行升降,通過驅動第三伸縮裝置的活塞桿能夠帶動第一伸縮裝置、第二伸縮裝置在左右方向上旋轉,配合第一伸縮裝置和第二伸縮裝置驅動活塞桿進行伸縮,能夠在帶動貨箱進行升降的前提下,還能夠在水平方向上進行移動至搬運車的前方或底盤的后方,以便于將貨箱快速運送至指定位置,提高施工效率。
技術研發人員:張順興,魏啟成,謝云輝,建陽陽,錢光耀
受保護的技術使用者:中國建筑第七工程局有限公司
技術研發日:20240119
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!