起重臂防竄動機構、起重臂及起重機的制作方法
本申請涉及起重機械,特別是涉及一種起重臂防竄動機構、起重臂及起重機。
背景技術:
1、起重機是指在一定范圍內垂直提升和水平搬運重物的多動作起重機械,又稱天車、航吊、吊車,起重機具有轉臺和起重臂,起重臂包括第一節臂、第二節臂、第三節臂至第n節臂,通常,稱第一節臂為基本臂,第二至第n節臂為伸縮節臂,基本臂與轉臺之間轉動連接,第二節臂與基本臂之間通過第一伸縮油缸連接,第三節臂與第二節臂之間通過第二伸縮油缸連接,以此類推,第n節臂與第n-1節臂之間通過第n伸縮油缸連接,或者第三節臂與第二節臂之間也可以通過伸縮鋼絲繩連接,以此類推,第n節臂與第n-1節臂之間也可通過鋼絲繩連接。
2、在起重機不進行起重作業時,起重臂整體處于收縮狀態且沿水平方向延伸;在需要起重機起重作業時,基本臂相對轉臺轉動至起重臂整體抬起到作業位置,抬起過程中或抬起至作業位置后伸縮節臂進行伸縮。起重臂在汽車起重機行進過程中急停時可能會因伸縮節臂的慣性作用和/或伸縮節臂所受慣性力大于伸縮節臂與基本臂之間以及油缸之間受到的阻力從而發生伸縮節臂相對于基本臂向前運動的現象,俗稱“竄臂”,“竄臂”常常造成吊鉤固定裝置被拉斷、起重臂頭部滑輪組撞壞,或威脅前方機動車輛與建筑物的安全等問題。
3、現有技術公開了一種防臂前伸自鎖裝置,在起重機不進行起重作業時,操控液壓系統使起重臂整體處于收縮狀態且沿水平方向延伸,將支架固定于基本臂,并保證初始位置處鎖鉤的鉤掛端脫離伸縮節臂,此時,人工轉動或者使用設置在基本臂或轉臺上的驅動件驅動鎖鉤轉動,以使鎖鉤的鉤掛端鉤掛于伸縮節臂上,以對鎖鉤的位置進行鎖定,轉動過程中彈性蓄能件蓄能,鎖鉤對伸縮節臂和基本臂之間的相對位置進行鎖定,從而可避免起重機行駛過程中被鉤掛端鉤掛的伸縮節臂與基本臂之間發生“竄臂”現象;在需要起重機進行起重作業時,解除前述鎖定,彈性蓄能件釋放能量恢復原狀,鎖鉤在彈性蓄能件的作用下轉回初始位置處,伸縮節臂可相對基本臂伸縮。然而,該防臂前伸自鎖裝置中,在具體鎖定的過程中需要借助人工或額外的驅動件驅動鎖鉤轉動來實現鎖鉤對伸縮節臂和基本臂之間的相對位置進行鎖定,解除鎖定需要借助彈性蓄能件釋放能量恢復原狀。因此,上述現有技術中的防臂前伸自鎖裝置結構較復雜,操作不方便,并且彈性蓄能件容易磨損導致防臂前伸自鎖裝置失效。
技術實現思路
1、有鑒于此,本申請的目的在于提供一種能夠實現防前竄、且操作簡單的起重臂防竄動機構、起重臂及起重機。
2、為達到上述目的,本申請提供一種起重臂防竄動機構,包括轉軸、拉桿和轉動體,所述轉動體繞所述轉軸可轉動地連接于所述轉軸,所述轉軸和所述拉桿用于分別設于起重臂的第一臂和第二臂,所述轉動體包括相互連接的拉鉤和平衡座,所述拉鉤和所述平衡座分別位于所述轉軸的兩側,所述轉動體在起重臂處于水平狀態時能夠保持水平平衡或具有朝向所述拉桿一側轉動的趨勢,而使所述拉鉤鉤住所述拉桿,所述轉動體在起重臂處于抬起狀態時能夠自動朝遠離所述拉桿一側轉動,而使所述拉鉤脫離所述拉桿。
3、可選地,當所述轉動體位于水平狀態時,所述轉動體的重心位于所述轉軸的正下方。
4、可選地,當所述轉動體位于水平狀態時,所述轉動體的重心位于所述平衡座一側的所述轉軸的側下方,所述轉動體從所述拉鉤與所述拉桿鉤住轉動至脫離的轉動角大于所述轉動體的重心和所述轉軸的連線與豎直方向的夾角。
5、可選地,所述轉動體的所述平衡座可轉動地連接于所述轉軸。
6、可選地,所述轉動體還包括連接所述拉鉤和所述平衡座的彈性件,所述彈性件的一端連接于所述拉鉤,另一端連接于所述平衡座。
7、可選地,所述起重臂防竄動機構還包括限位拉件,所述限位拉件的兩端分別連接于所述拉鉤和所述平衡座,以將所述拉鉤與所述平衡座之間的運動距離限定在預設范圍內。
8、可選地,所述起重臂防竄動機構還包括擋桿,所述擋桿設于所述轉動體從所述拉鉤鉤住所述拉桿的狀態轉動至所述拉鉤脫離所述拉桿的狀態的過程中所述平衡座的運動軌跡所處的一側。
9、本申請還提供一種起重臂,包括第一臂、第二臂和上述起重臂防竄動機構,所述轉軸設于所述第一臂,所述拉桿設于所述第二臂。
10、可選地,所述起重臂包括水平狀態和抬起狀態,所述轉動體被配置為隨所述起重臂狀態的改變繞所述轉軸自動轉動,以使所說拉鉤鉤住所說拉桿或脫離所述拉桿,當所述起重臂處于水平狀態時,所述拉鉤鉤住所述拉桿;當所述起重臂處于抬起狀態時,所述拉鉤脫離所述拉桿。
11、本申請還提供一種起重機,包括上述起重臂。
12、由上述,本申請的起重臂防竄動機構、起重臂及起重機中,轉動體的拉鉤能夠在起重機行駛而起重臂水平時自動鉤住拉桿而避免起重臂前竄,并能夠在起重臂抬起需要工作時自動脫離拉桿而允許起重臂伸縮,其結構簡單,且無需工作人員特殊操作即可防止起重臂前竄,而又不影響起重臂的正常使用。
技術特征:
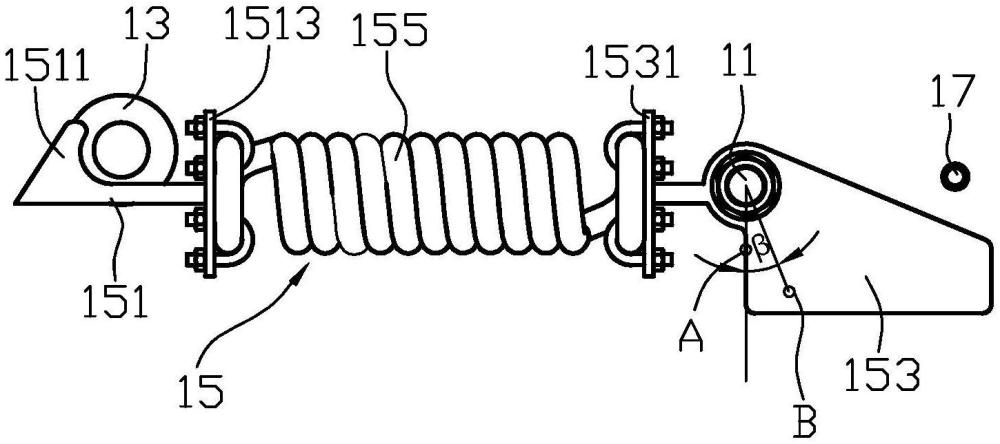
1.一種起重臂防竄動機構,其特征在于,包括轉軸(11)、拉桿(13)和轉動體(15),所述轉動體(15)繞所述轉軸(11)可轉動地連接于所述轉軸(11),所述轉軸(11)和所述拉桿(13)用于分別設于起重臂的第一臂和第二臂,所述轉動體(15)包括相互連接的拉鉤(151)和平衡座(153),所述拉鉤(151)和所述平衡座(153)分別位于所述轉軸(11)的兩側,所述轉動體(15)在起重臂處于水平狀態時能夠保持水平平衡或具有朝向所述拉桿(13)一側轉動的趨勢,而使所述拉鉤(151)鉤住所述拉桿(13),所述轉動體(15)在起重臂處于抬起狀態時能夠自動朝遠離所述拉桿(13)一側轉動,而使所述拉鉤(151)脫離所述拉桿(13)。
2.如權利要求1所述的起重臂防竄動機構,其特征在于,當所述轉動體(15)位于水平狀態時,所述轉動體(15)的重心(a)位于所述轉軸(11)的正下方。
3.如權利要求1所述的起重臂防竄動機構,其特征在于,當所述轉動體(15)位于水平狀態時,所述轉動體(15)的重心位于所述平衡座(153)一側的所述轉軸(11)的側下方,所述轉動體(15)從所述拉鉤(151)與所述拉桿(13)鉤住轉動至脫離的轉動角(α)大于所述轉動體(15)的重心(b)和所述轉軸(11)的連線與豎直方向的夾角(β)。
4.如權利要求1所述的起重臂防竄動機構,其特征在于,所述轉動體(15)的所述平衡座(153)可轉動地連接于所述轉軸(11)。
5.如權利要求1所述的起重臂防竄動機構,其特征在于,所述轉動體(15)還包括連接所述拉鉤(151)和所述平衡座(153)的彈性件(155),所述彈性件(155)的一端連接于所述拉鉤(151),另一端連接于所述平衡座(153)。
6.如權利要求5所述的起重臂防竄動機構,其特征在于,所述起重臂防竄動機構還包括限位拉件,所述限位拉件的兩端分別連接于所述拉鉤(151)和所述平衡座(153),以將所述拉鉤(151)與所述平衡座(153)之間的運動距離限定在預設范圍內。
7.如權利要求1所述的起重臂防竄動機構,其特征在于,所述起重臂防竄動機構還包括擋桿(17),所述擋桿(17)設于所述轉動體(15)從所述拉鉤(151)鉤住所述拉桿(13)的狀態轉動至所述拉鉤(151)脫離所述拉桿(13)的狀態的過程中所述平衡座(153)的運動軌跡所處的一側。
8.一種起重臂,其特征在于,包括第一臂(91)、第二臂(93)和如權利要求1-7任意一項所述的起重臂防竄動機構,所述轉軸(11)設于所述第一臂(91),所述拉桿(13)設于所述第二臂(93)。
9.如權利要求8所述的起重臂,其特征在于,所述起重臂包括水平狀態和抬起狀態,所述轉動體(15)被配置為隨所述起重臂狀態的改變繞所述轉軸(11)自動轉動,以使所述拉鉤(151)鉤住所述拉桿(13)或脫離所述拉桿(13),當所述起重臂處于水平狀態時,所述拉鉤(151)鉤住所述拉桿(13);當所述起重臂處于抬起狀態時,所述拉鉤(151)脫離所述拉桿(13)。
10.一種起重機,其特征在于,包括權利要求8或9所述的起重臂。
技術總結
本申請公開一種起重臂防竄動機構、起重臂及起重機,該起重臂防竄動機構包括轉軸、拉桿和轉動體,轉動體繞轉軸可轉動地連接于轉軸,轉動體包括相互連接的拉鉤和平衡座,拉鉤和平衡座分別位于轉軸的兩側,轉動體在起重臂處于水平狀態時能夠保持水平平衡或具有朝向拉桿一側轉動的趨勢,而使拉鉤鉤住拉桿,轉動體在起重臂處于抬起狀態時能夠自動朝遠離拉桿一側轉動,而使拉鉤脫離拉桿。本申請的技術方案中,轉動體的拉鉤能夠在起重機行駛而起重臂水平時自動鉤住拉桿而避免起重臂前竄,并能夠在起重臂抬起需要工作時自動脫離拉桿而允許起重臂伸縮,其結構簡單,且無需工作人員特殊操作即可防止起重臂前竄,而又不影響起重臂的正常使用。
技術研發人員:陳華林,廖啟輝,羅彬,曾航
受保護的技術使用者:中聯重科股份有限公司
技術研發日:
技術公布日:2024/10/31
- 還沒有人留言評論。精彩留言會獲得點贊!