一種全齒輪式四向穿梭車及其工作方法與流程
本發明屬于倉儲物流設備,具體公開了一種全齒輪式四向穿梭車及其工作方法。
背景技術:
1、在倉儲物流的日常作業中,越來越多的工廠采用穿梭車與貨架配合的集成自動化系統,來替代傳統的倉儲物流作業,而四向穿梭車系統以更高的建設經濟性尤為突出;
2、以往的四向穿梭車,在使用時,在四向穿梭系統中,四向穿梭車行走系統通常采用多輪驅動行走,而市面上常規行走系統多見于通過鏈傳動實現動力傳遞,而鏈傳動難于保持全部動作同步實施,同時也存在液壓頂升不同步現象,便需要工人定期對四向穿梭車進行維護,以及保證四向穿梭車穩定使用,便導致對工人造成較大的繁瑣性,以及無形中增加了工人勞動成本,所以急需要一種能夠緩解上述問題的方案。
技術實現思路
1、本發明的目的是為了解決現有技術中存在的缺點,而提出的一種全齒輪式四向穿梭車及其工作方法。
2、為達到以上目的,本發明提供了一種全齒輪式四向穿梭車,包括雙巷行走伺服電機行星減速機,所述雙巷行走伺服電機行星減速機的后端固定連接有頂升換向伺服電機行星減速機,所述頂升換向伺服電機行星減速機的一端安裝有頂升換向齒輪箱,所述頂升換向齒輪箱的前端安裝有頂升換向驅動軸,所述頂升換向齒輪箱的另一端固定連接有y巷行走齒輪箱,所述y巷行走齒輪箱的前端固定連接有x巷行走齒輪箱。
3、在上述技術方案中,優選的,所述雙巷行走伺服電機行星減速機的一端安裝有萬向伸縮聯軸器,所述頂升換向驅動軸的另一端安裝有凸輪擺臂,所述y巷行走齒輪箱的另一端安裝有x巷行走輪,所述x巷行走齒輪箱的前端安裝有y巷行走輪。
4、在上述技術方案中,優選的,所述萬向伸縮聯軸器的前端安裝有y巷行走驅動軸,所述頂升換向伺服電機行星減速機的后端固定連接有電池,所述y巷行走齒輪箱的上端固定連接有x巷導向滑塊。
5、在上述技術方案中,優選的,所述x巷行走齒輪箱的一端安裝有槽型定位光電組,所述x巷行走齒輪箱的后端安裝有定位裝置。
6、在上述技術方案中,優選的,所述y巷行走齒輪箱、x巷行走齒輪箱的數量均有兩組,兩組所述y巷行走齒輪箱、x巷行走齒輪箱之間形成口字形。
7、在上述技術方案中,優選的,所述萬向伸縮聯軸器通過轉軸與y巷行走齒輪箱相安裝,所述凸輪擺臂與x巷導向滑塊之間形成滑動連接。
8、在上述技術方案中,優選的,所述x巷行走輪的數量有多組,每組所述y巷行走齒輪箱均與兩組x巷行走輪相安裝。
9、在上述技術方案中,優選的,所述y巷行走輪的數量有多組,每組所述x巷行走齒輪箱均與四組y巷行走輪相安裝。
10、在上述技術方案中,優選的,所述電池通過電線與雙巷行走伺服電機行星減速機之間形成電性連接,所述電池通過電線與頂升換向伺服電機行星減速機之間形成電性連接。
11、還提供一種全齒輪式四向穿梭車工作方法,用于操作一種全齒輪式四向穿梭車,包括以下步驟:
12、s1:首先啟動雙巷行走伺服電機行星減速機,便使雙巷行走伺服電機行星減速機經過萬向伸縮聯軸器控制x巷行走齒輪箱,且使x巷行走齒輪箱帶動x巷行走輪進行旋轉,使x巷行走輪在x巷軌道上進行滾動,從而進行移動;
13、s2:其次啟動頂升換向伺服電機行星減速機,便使頂升換向伺服電機行星減速機經過頂升換向齒輪箱帶動頂升換向驅動軸轉動,從而使頂升換向驅動軸連帶凸輪擺臂移動,便使凸輪擺臂沿著x巷導向滑塊向上滑動,從而使凸輪擺臂向上伸縮,便可以使凸輪擺臂同步向上移動,且使凸輪擺臂帶動四向穿梭車進行換向移動;
14、s3:最后雙巷行走伺服電機行星減速機經過萬向伸縮聯軸器控制y巷行走齒輪箱,便使y巷行走齒輪箱經過y巷行走驅動軸帶動y巷行走輪旋轉,便使y巷行走輪在y巷軌道上進行滾動,從而進行移動,且可以實現多向移動的作用。
15、與現有技術相比,本發明具有以下有益效果:
16、1、通過頂升換向伺服電機行星減速機經過頂升換向齒輪箱帶動頂升換向驅動軸轉動,便進行傳動,才能使凸輪擺臂向上伸縮動作始終一致,排除凸輪擺臂頂升不同步現象,不依賴于電控或者軟件程序,可以在網絡通訊信號、軟件程序漏洞等原因導致液壓缸升降出現問題,避免經濟損失和人員傷亡事故的發生。
17、2、同時在密集型存儲場景下,貨架或者樓層都會比較高,出入庫的位置一般是在地面一樓,這時候就需要用四向穿梭車到高層換層提升機與上層每一層貨架或者樓層到貨物取放貨物,實現高層儲位上貨物的出庫或者入庫動作,并且使凸輪擺臂同步向上移動,且使凸輪擺臂帶動四向穿梭車進行換向移動,保證四向穿梭車移動穩定性。
技術特征:
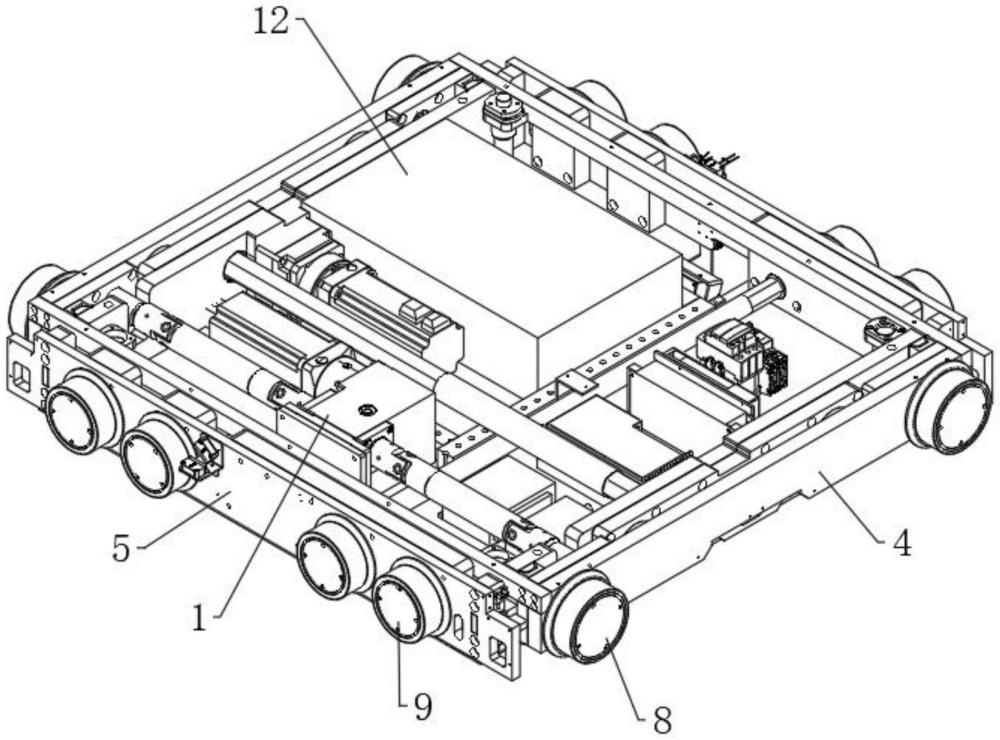
1.一種全齒輪式四向穿梭車,包括雙巷行走伺服電機行星減速機(1),其特征在于,所述雙巷行走伺服電機行星減速機(1)的后端固定連接有頂升換向伺服電機行星減速機(2),所述頂升換向伺服電機行星減速機(2)的一端安裝有頂升換向齒輪箱(3),所述頂升換向齒輪箱(3)的前端安裝有頂升換向驅動軸(10),所述頂升換向齒輪箱(3)的另一端固定連接有y巷行走齒輪箱(4),所述y巷行走齒輪箱(4)的前端固定連接有x巷行走齒輪箱(5)。
2.根據權利要求1所述的一種全齒輪式四向穿梭車,其特征在于,所述雙巷行走伺服電機行星減速機(1)的一端安裝有萬向伸縮聯軸器(6),所述頂升換向驅動軸(10)的另一端安裝有凸輪擺臂(7),所述y巷行走齒輪箱(4)的另一端安裝有x巷行走輪(8),所述x巷行走齒輪箱(5)的前端安裝有y巷行走輪(9)。
3.根據權利要求2所述的一種全齒輪式四向穿梭車,其特征在于,所述萬向伸縮聯軸器(6)的前端安裝有y巷行走驅動軸(11),所述頂升換向伺服電機行星減速機(2)的后端固定連接有電池(12),所述y巷行走齒輪箱(4)的上端固定連接有x巷導向滑塊(13)。
4.根據權利要求3所述的一種全齒輪式四向穿梭車,其特征在于,所述x巷行走齒輪箱(5)的一端安裝有槽型定位光電組(14),所述x巷行走齒輪箱(5)的后端安裝有定位裝置(15)。
5.根據權利要求4所述的一種全齒輪式四向穿梭車,其特征在于,所述y巷行走齒輪箱(4)、x巷行走齒輪箱(5)的數量均有兩組,兩組所述y巷行走齒輪箱(4)、x巷行走齒輪箱(5)之間形成口字形。
6.根據權利要求4所述的一種全齒輪式四向穿梭車,其特征在于,所述萬向伸縮聯軸器(6)通過轉軸與y巷行走齒輪箱(4)相安裝,所述凸輪擺臂(7)與x巷導向滑塊(13)之間形成滑動連接。
7.根據權利要求4所述的一種全齒輪式四向穿梭車,其特征在于,所述x巷行走輪(8)的數量有多組,每組所述y巷行走齒輪箱(4)均與兩組x巷行走輪(8)相安裝。
8.根據權利要求4所述的一種全齒輪式四向穿梭車,其特征在于,所述y巷行走輪(9)的數量有多組,每組所述x巷行走齒輪箱(5)均與四組y巷行走輪(9)相安裝。
9.根據權利要求4所述的一種全齒輪式四向穿梭車,其特征在于,所述電池(12)通過電線與雙巷行走伺服電機行星減速機(1)之間形成電性連接,所述電池(12)通過電線與頂升換向伺服電機行星減速機(2)之間形成電性連接。
10.一種全齒輪式四向穿梭車工作方法,用于操作權利要求1-9任意一條所述的一種全齒輪式四向穿梭車,其特征在于,包括以下步驟:
技術總結
本發明屬于倉儲物流設備技術領域,具體公開了一種全齒輪式四向穿梭車,包括雙巷行走伺服電機行星減速機,所述雙巷行走伺服電機行星減速機的后端固定連接有頂升換向伺服電機行星減速機,所述頂升換向伺服電機行星減速機的一端安裝有頂升換向齒輪箱,所述頂升換向齒輪箱的前端安裝有頂升換向驅動軸。本發明通過頂升換向伺服電機行星減速機經過頂升換向齒輪箱帶動頂升換向驅動軸轉動,便進行傳動,才能使凸輪擺臂向上伸縮動作始終一致,排除凸輪擺臂頂升不同步現象,不依賴于電控或者軟件程序,可以在網絡通訊信號、軟件程序漏洞等原因導致液壓缸升降出現問題,避免經濟損失和人員傷亡事故的發生。
技術研發人員:沈健,陳林華
受保護的技術使用者:牛眼智能物流設備(蘇州)有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!