接駁定位裝置及方法與流程
本發明涉及自動化接駁定位設備,特別涉及一種接駁定位裝置及方法。
背景技術:
1、在現代工業中,機器臂作為一種高精度、多輸入輸出、高度非線性和強耦合的復雜系統,因其獨特的操作靈活性,已在工業裝配和安全防爆等領域得到了廣泛應用。然而,在機器臂的開發和應用過程中,其連接處的設計至關重要,必須滿足良好的導向性和高定位精度的基本要求。
2、在實際使用場景中,機器臂工作時通常會配備與之對接的接貨料小車。現有的接貨料小車通常依靠人工操作,這在運行過程中容易出現偏差,難以滿足機器臂在許多使用場景中對精度的高要求。因此,迫切需要一種自動化接駁定位設備,能夠在機器臂工作時確保與其對接的接貨料小車的穩定性,從而保證整體系統的精度和可靠性。
技術實現思路
1、本發明的主要目的是提出一種接駁定位裝置及方法,旨在機器臂工作時確保與其對接的接貨料小車的穩定性,從而保證整體系統的精度和可靠性。
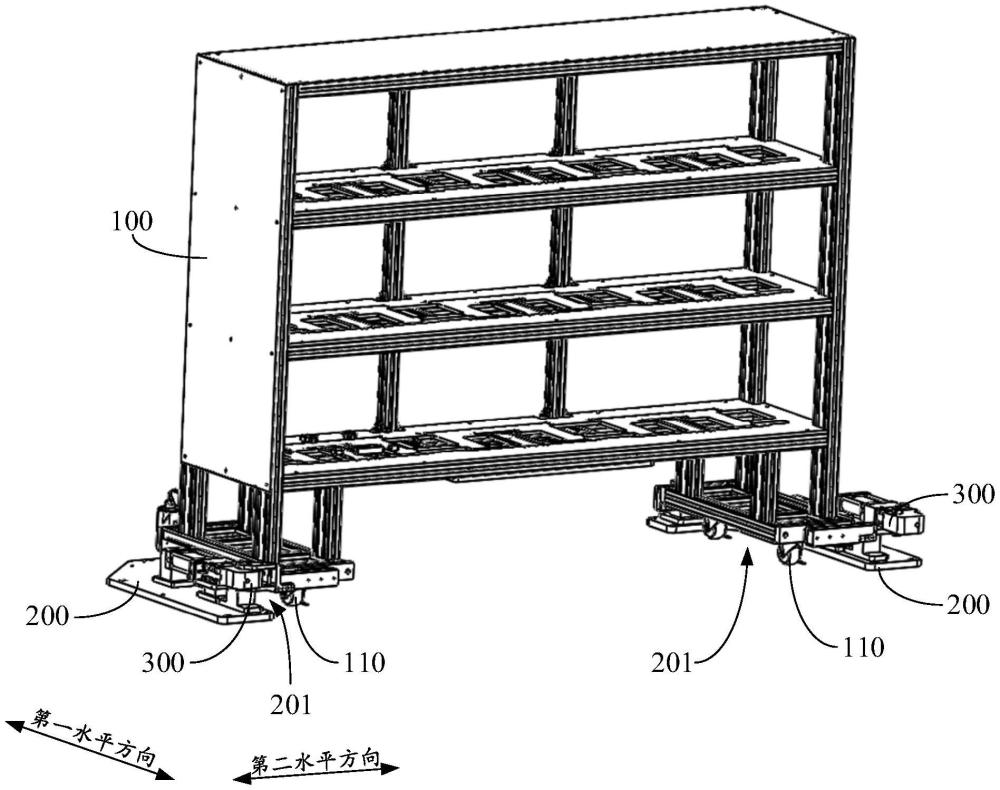
2、為實現上述目的,本發明提出的接駁定位裝置,用于貨料小車,所述貨料小車包括行走底盤,所述接駁定位裝置包括:
3、底板,所述底板形成有一具有開口的接駁空間,所述接駁空間沿第一水平方向延伸,所述開口用于供所述行走底盤行走至所述接駁空間內;
4、抵緊機構,所述抵緊機構包括驅動組件和抵緊組件,所述驅動組件安裝于所述底板,所述抵緊組件通過轉軸可轉動地安裝于所述底板,所述轉軸沿豎向延伸,所述驅動組件與所述抵緊組件連接,所述驅動組件用于驅動所述抵緊組件繞所述轉軸在接收位置和抵緊位置之間轉動,且所述抵緊組件處于所述接收位置時沿所述第一水平方向設置以打開所述開口,所述抵緊組件處于所述抵緊位置時沿第二水平方向設置以關閉所述開口,并將行走至所述接駁空間內的所述行走底盤定位并抵緊于所述底板,所述第一水平方向和所述第二水平方向呈夾角設置;
5、控制模塊,所述控制模塊包括控制單元和用于檢測所述行走底盤的檢測單元,所述檢測單元及所述驅動組件均與所述控制單元電連接。
6、在一實施方式中,所述抵緊組件包括鉸接座和懸臂,所述鉸接座通過所述轉軸可轉動地安裝于所述底板,所述懸臂的連接端與所述鉸接座連接,所述懸臂的自由端懸設于所述底板外,所述驅動組件與所述鉸接座連接,并用于驅動所述鉸接座繞所述轉軸旋轉,以帶動所述懸臂在所述接收位置和所述抵緊位置之間轉動。
7、在一實施方式中,所述鉸接座包括連接板和兩個鉸接板,所述懸臂的連接與所述連接板連接,兩個所述鉸接板沿豎向間隔設置,所述連接板安裝于兩個所述鉸接板之間,且兩個所述鉸接板均通過所述轉軸可轉動地安裝于所述底板。
8、在一實施方式中,所述驅動組件包括驅動件和安裝座,所述驅動件和所述安裝座沿所述第一水平方向間隔設置,所述驅動件安裝于所述底板,所述底板設置有所述安裝座;兩個所述鉸接板均通過所述轉軸可轉動地安裝于所述安裝座,兩個所述鉸接板均與所述驅動件連接,所述驅動件用于驅動兩個所述鉸接板繞所述轉軸相對所述安裝座旋轉;所述驅動件與所述控制單元電連接。
9、在一實施方式中,所述安裝座包括安裝塊和延長塊,所述延長塊與所述底板沿豎向間隔設置,所述安裝塊安裝于所述底板,所述延長塊的一端安裝于所述安裝塊,所述延長塊的另一端自所述安裝塊沿所述第一水平方向伸出所述底板外,兩個所述鉸接板均通過所述轉軸可轉動地安裝于所述延長塊的相對兩側。
10、在一實施方式中,所述檢測單元安裝于所述底板;當所述抵緊組件位于所述接收位置時,所述檢測單元用于檢測位于所述接駁空間內的所述行走底盤。
11、在一實施方式中,所述檢測單元安裝于所述抵緊組件;當所述抵緊組件處于所述抵緊位置時,所述檢測單元用于檢測位于所述接駁空間內的所述行走底盤。
12、在一實施方式中,所述抵緊機構還包括第一定位板和第二定位板,所述接駁空間的相鄰兩側分別設置有所述第一定位板和所述第二定位板,所述第一定位板和所述第二定位板均安裝于所述底板;所述第一定位板沿所述第一水平方向延伸,所述第二定位板沿所述第二水平方向延伸。
13、在一實施方式中,所述驅動組件能驅動所述抵緊組件繞所述轉軸在0°至100°的角度范圍內旋轉。
14、本發明還提出一種接駁定位方法,應用如上述的接駁定位裝置,所述接駁定位方法包括:
15、利用所述控制模塊獲取所述抵緊機構的當前位置;
16、判斷所述當前位置是否為所述接收位置;
17、若是,則所述行走底盤沿所述第一水平方向行走至所述接駁空間內,并利用所述檢測單元獲取所述行走底盤的接駁位置;
18、判斷所述接駁位置是否為預設位置;
19、若是,則利用所述控制單元控制所述抵緊機構從所述接收位置繞所述轉軸旋轉至所述抵緊位置,以將行走至所述接駁空間內的所述行走底盤定位并抵緊于所述底板。
20、本發明的技術方案通過抵緊組件和具有接駁空間的底板,在行走底盤行走至接駁空間內后,利用抵緊組件對行走底盤施加抵緊力,使行走底盤被抵緊于接駁空間內即底板的內緣,以對貨料小車進行接駁定位,增強了貨料小車于接駁狀態時的穩定性和可靠性,防止貨料小車在與外部的機器臂對接時產生晃動,避免機器臂操作出現誤差,保障了機器臂的工作精度,有效解決了機器臂與貨料小車對接時的穩定性差的技術問題,滿足了工業裝配等領域對高精度操作的需求;并且,在行走底盤進入接駁空間后,通過檢測單元檢測行走底盤的位置信息,利用控制單元控制驅動組件驅動抵緊組件繞轉軸旋轉,使行走底盤能被自動接駁定位并固定,減少了人工干預,進一步地提高了工作效率和作業安全性。
技術特征:
1.一種接駁定位裝置,其特征在于,用于貨料小車,所述貨料小車包括行走底盤,所述接駁定位裝置包括:
2.如權利要求1所述的接駁定位裝置,其特征在于,所述抵緊組件包括鉸接座和懸臂,所述鉸接座通過所述轉軸可轉動地安裝于所述底板,所述懸臂的連接端與所述鉸接座連接,所述懸臂的自由端懸設于所述底板外,所述驅動組件與所述鉸接座連接,并用于驅動所述鉸接座繞所述轉軸旋轉,以帶動所述懸臂在所述接收位置和所述抵緊位置之間轉動。
3.如權利要求2所述的接駁定位裝置,其特征在于,所述鉸接座包括連接板和兩個鉸接板,所述懸臂的連接端與所述連接板連接,兩個所述鉸接板沿豎向間隔設置,所述連接板安裝于兩個所述鉸接板之間,且兩個所述鉸接板均通過所述轉軸可轉動地安裝于所述底板。
4.如權利要求3所述的接駁定位裝置,其特征在于,所述驅動組件包括驅動件和安裝座,所述驅動件和所述安裝座沿所述第一水平方向間隔設置,所述驅動件安裝于所述底板,所述底板設置有所述安裝座;兩個所述鉸接板均通過所述轉軸可轉動地安裝于所述安裝座,兩個所述鉸接板均與所述驅動件連接,所述驅動件用于驅動兩個所述鉸接板繞所述轉軸相對所述安裝座旋轉;所述驅動件與所述控制單元電連接。
5.如權利要求4所述的接駁定位裝置,其特征在于,所述安裝座包括安裝塊和延長塊,所述延長塊與所述底板沿豎向間隔設置,所述安裝塊安裝于所述底板,所述延長塊的一端安裝于所述安裝塊,所述延長塊的另一端自所述安裝塊沿所述第一水平方向伸出所述底板外,兩個所述鉸接板均通過所述轉軸可轉動地安裝于所述延長塊的相對兩側。
6.如權利要求1至5中任一項所述的接駁定位裝置,其特征在于,所述檢測單元安裝于所述底板;當所述抵緊組件位于所述接收位置時,所述檢測單元用于檢測位于所述接駁空間內的所述行走底盤。
7.如權利要求1至5中任一項所述的接駁定位裝置,其特征在于,所述檢測單元安裝于所述抵緊組件;當所述抵緊機構處于所述抵緊位置時,所述檢測單元用于檢測位于所述接駁空間內的所述行走底盤。
8.如權利要求1至5中任一項所述的接駁定位裝置,其特征在于,所述抵緊機構還包括第一定位板和第二定位板,所述接駁空間的相鄰兩側分別設置有所述第一定位板和所述第二定位板,所述第一定位板和所述第二定位板均安裝于所述底板;所述第一定位板沿所述第一水平方向延伸,所述第二定位板沿所述第二水平方向延伸。
9.如權利要求1至5中任一項所述的接駁定位裝置,其特征在于,所述驅動組件能驅動所述抵緊組件繞所述轉軸在0°至100°的角度范圍內旋轉。
10.一種接駁定位方法,其特征在于,應用如權利要求1至9中任一項所述的接駁定位裝置,所述接駁定位方法包括:
技術總結
本發明公開了一種接駁定位裝置及方法,涉及自動化接駁定位設備技術領域,其中,接駁定位裝置包括具有接駁空間的底板、抵緊機構和控制模塊,抵緊機構可轉動地安裝于底板,抵緊機構能在接收位置和抵緊位置之間轉動,以對應地打開或關閉接駁空間,控制模塊與抵緊機構電連接;本發明通過抵緊組件和具有接駁空間的底板,在行走底盤行走至接駁空間內后,利用抵緊組件對行走底盤施加抵緊力,使行走底盤被抵緊于接駁空間內即底板的內緣,以對貨料小車進行接駁定位,增強了貨料小車于接駁狀態時的穩定性和可靠性,保障了機器臂的工作精度,有效解決了機器臂與貨料小車對接時的穩定性差的技術問題,滿足了工業裝配等領域對高精度操作的需求。
技術研發人員:趙月,李慶華
受保護的技術使用者:南京電研電力自動化股份有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!