一種跨介質無人飛行器
本發明涉及無人飛行器領域,具體為一種跨介質無人飛行器。
背景技術:
1、目前大部分跨介質飛行器為適應不同流體介質航行時的增升減阻要求,使用變體結構設計。目前的變體結構形式主要有:橫向折疊機翼、變后掠角機翼和仿生撲翼式兩棲驅動翼。
2、橫向折疊機翼(如專利唐冰,劉奇權,劉以建.一種合頁折疊機構及橫向折疊的機翼[p].四川:cn207292377u,2018-05-01.)沿著翼展方向進行折疊,通過調整翼展方向的尺度有效地減小入水沖擊力矩和水下航行的流體阻力,但是鉸鏈在實現折疊時需要較大的驅動力矩,同時鉸鏈關節處成為機翼的脆弱部位,承受較大的沖擊力時易發生損傷。
3、仿生撲翼式機翼(如論文張振鴻.羽毛仿生撲翼飛行器設計與實現[d].廣西大學,2022.doi:10.27034/d.cnki.ggxiu.2021.001580.)主要是仿生的兩棲水鳥,通過關節改變翼展,適應不同的介質,但結構復雜,對控制要求較高。
4、變后掠機翼結構內翼段是固定的,外翼同內翼用鉸鏈軸連接,通過液壓助力器操縱外翼前后轉動,以改變外翼段的后掠角和整個機翼的展弦比。但是機翼轉動的機構復雜,,重量大;活動外翼的載荷全部集中在樞軸上,而樞軸又必須靈活地轉動。
5、目前跨介質變體飛行器最理想的入水方式是俯沖式著陸,對環境的要求和能耗最低,不過,它可能會遇到沖擊力較大的問題。(如論文,云忠,溫猛,羅自榮等.仿翠鳥水空跨介質航行器設計與入水分析[j].浙江大學學報(工學版),2020,54(02):)。
6、綜上所述,現有跨介質飛行器存在不能同時保證在兩介質中航行的性能的問題。
技術實現思路
1、現有跨介質飛行器存在不能同時保證在兩介質中航行的性能的問題,為保證飛行器在空中和水中的航行速度,本發明設計了一種跨介質無人飛行器,在飛行器落入水中之前機翼先收縮然后變后掠角收回機身中,使入水后飛行器外形類似潛艇,保證在水中仍有優良的機動性能。
2、本發明的技術方案為:
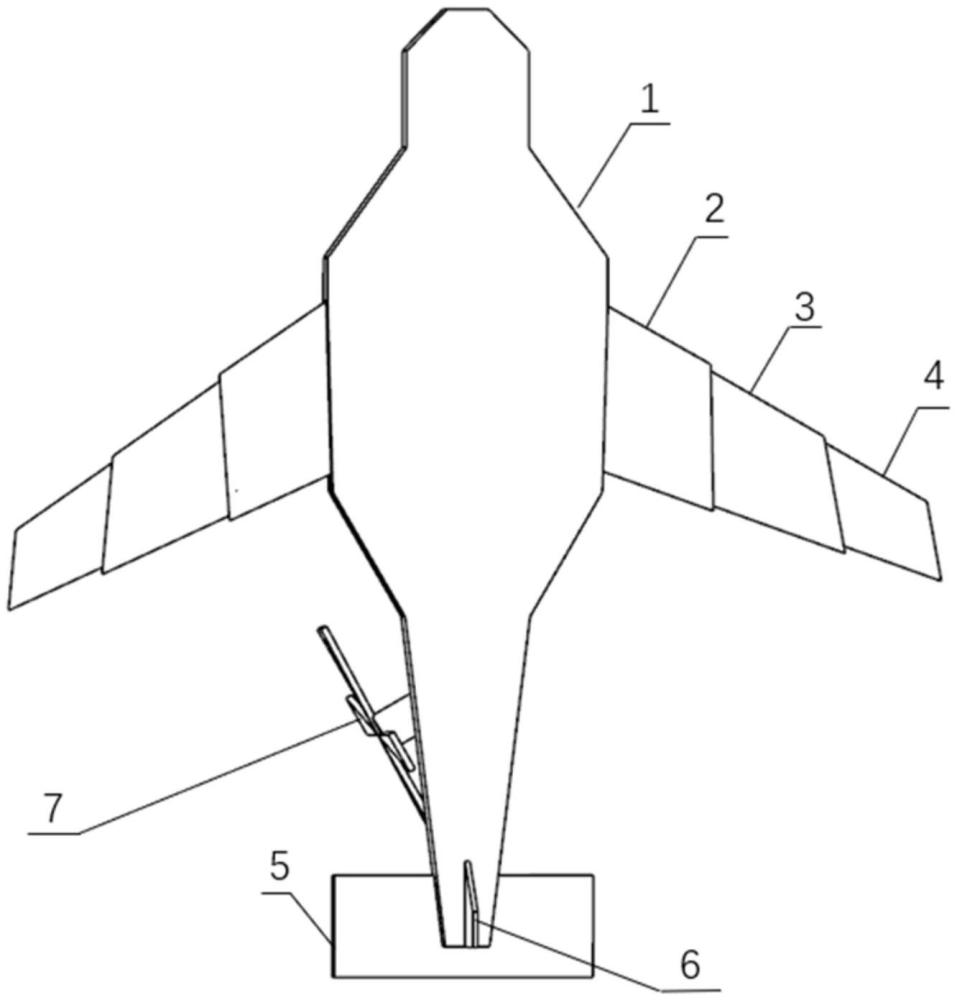
3、本發明提供了一種跨介質無人飛行器,包括:
4、機身;機身內設有液壓系統或電機驅動系統,機身內還安裝有行星滾柱絲杠升降系統;
5、機翼,其通過機翼連接結構與機身連接;
6、吊艙推進器,其裝配在機身的機尾下方;
7、入水前,通過液壓系統或電機驅動系統先控制機翼先收縮然后變后掠角收回機身中;入水后,通過行星滾柱絲杠升降系統控制吊艙推進器從機身中伸出,由吊艙推進器控制跨介質無人飛行器在水下的運動;
8、,并通過液壓系統或電機驅動系統先控制機翼由變后掠角狀態從機身放出后再展開;
9、升空后,通過行星滾柱絲杠升降系統控制吊艙推進器收入機身中,減小飛行時的阻力。優選地,機翼連接結構包括:主梁導軌、導軌連接桿、滑軌桿、機翼連接桿、機翼連接滑塊和承力桿;
10、主梁導軌固定于機身中;
11、導軌連接桿通過滑塊與主梁導軌可滑動裝配,滑塊帶有滑塊鎖死機構;
12、滑軌桿的一端與導軌連接桿活動連接,另一端與機翼連接滑塊活動連接,機翼連接滑塊與機翼上的導軌滑動連接;
13、機翼連接桿的一端與導軌連接桿活動連接,另一端與機翼活動連接;
14、承力桿一端與機翼的后緣根部剛性連接,另一端和機身主梁滑塊活動連接;
15、機身主梁滑塊與主梁導軌可滑動裝配,且機身主梁滑塊上帶有鎖死機構,機身主梁滑塊和滑塊相連。
16、優選地,需要將機翼收回到機身中時,控制滑塊鎖死機構和鎖死機構解鎖,通過機身內設有的液壓系統或電機驅動系統驅動機身主梁滑塊沿著主梁導軌向前滑動,使承力桿向內側收縮,從而帶動機翼向內收縮;
17、同時,機身主梁滑塊滑動時會通過滑塊帶動導軌連接桿沿著主梁導軌向前滑動,滑軌桿在機翼內側向前滑動,機翼連接桿收縮從而拉動機翼后緣根部向內側移動,機翼繞其前緣根部轉動,實現機翼向內收縮;
18、在機翼完全收縮后,控制鎖死機構和滑塊鎖死機構均鎖死。
19、優選地,需要機翼伸展開時,控制滑塊鎖死機構和鎖死機構解鎖,通過機身內設有的液壓系統或電機驅動系統驅動機身主梁滑塊沿著主梁導軌向后滑動,使承力桿向外側伸展,從而帶動機翼向外側伸展;
20、同時,機身主梁滑塊滑動時會通過滑塊帶動導軌連接桿沿著主梁導軌向后滑動,滑軌桿在機翼內側向后滑動,機翼連接桿伸展從而推動機翼后緣根部向外側移動,機翼繞其前緣根部轉動,實現機翼向外伸展;
21、在機翼完全伸展開后,控制鎖死機構和滑塊鎖死機構均鎖死,使承力桿對機翼進行剛性支撐。
22、優選地,機翼連接結構包括:主梁導軌、導軌連接桿、滑軌桿、機翼連接桿、機翼連接滑塊和作動筒;
23、主梁導軌固定于機身中;
24、導軌連接桿通過滑塊與主梁導軌可滑動裝配,滑塊帶有滑塊鎖死機構;
25、滑軌桿的一端與導軌連接桿活動連接,另一端與機翼連接滑塊活動連接,機翼連接滑塊與機翼上的導軌滑動連接;
26、機翼連接桿的一端與導軌連接桿活動連接,另一端與機翼活動連接;
27、作動筒一端與機翼的后緣根部相鉸接,另一端與主梁導軌鉸接;
28、滑塊帶有鎖死機構。
29、優選地,機翼包括:機翼外翼、機翼中翼和機翼內翼;
30、通過液壓系統或電機驅動系統驅動所述機翼外翼先收縮到機翼中翼中,然后機翼中翼攜帶機翼外翼一并收入機翼內翼中;
31、機翼連接滑塊與機翼內翼上的導軌滑動連接;
32、機翼連接桿與機翼內翼活動連接;
33、承力桿一端與機翼內翼的后緣根部剛性連接;
34、通過液壓系統或電機驅動系統驅動。
35、優選地,吊艙推進器包括螺旋槳、轉舵電機和軸;
36、轉舵電機裝配在機身的機尾下方,轉舵電機通過軸與螺旋槳相配合,實現螺旋槳驅動,為飛行器在水下提供矢量推力。
37、本發明的有益效果為:
38、在飛行器落入水中之前機翼先收縮然后變后掠角收回機身中,使入水后飛行器外形類似潛艇,保證在水中仍有優良的機動性能。
技術特征:
1.一種跨介質無人飛行器,其特征在于,包括:
2.根據權利要求1所述的跨介質無人飛行器,其特征在于,機翼連接結構包括:主梁導軌(8)、導軌連接桿(9)、滑軌桿(10)、機翼連接桿(11)、機翼連接滑塊(12)和承力桿(13);
3.根據權利要求2所述的跨介質無人飛行器,其特征在于,需要將機翼收回到機身(1)中時,控制滑塊鎖死機構和鎖死機構解鎖,通過機身(1)內設有的液壓系統或電機驅動系統驅動機身主梁滑塊(14)沿著主梁導軌(8)向前滑動,使承力桿(13)向內側收縮,從而帶動機翼向內收縮;
4.根據權利要求2所述的跨介質無人飛行器,其特征在于,需要機翼伸展開時,控制滑塊鎖死機構和鎖死機構解鎖,通過機身(1)內設有的液壓系統或電機驅動系統驅動機身主梁滑塊(14)沿著主梁導軌(8)向后滑動,使承力桿(13)向外側伸展,從而帶動機翼向外側伸展;
5.根據權利要求1所述的跨介質無人飛行器,其特征在于,機翼連接結構包括:主梁導軌(8)、導軌連接桿(9)、滑軌桿(10)、機翼連接桿(11)、機翼連接滑塊(12)和作動筒;
6.根據權利要求2所述的跨介質無人飛行器,其特征在于,機翼包括:機翼外翼(4)、機翼中翼(3)和機翼內翼(2);
7.根據權利要求1所述的跨介質無人飛行器,其特征在于,吊艙推進器(7)包括螺旋槳(15)、轉舵電機(16)和軸(17);
技術總結
本發明涉及一種跨介質無人飛行器,其包括:機身;機身內設有液壓系統或電機驅動系統,還安裝有行星滾柱絲杠升降系統;機翼,通過機翼連接結構與機身連接;吊艙推進器;入水前,通過液壓系統或電機驅動系統先控制機翼先收縮然后變后掠角收回機身中;入水后,通過行星滾柱絲杠升降系統控制吊艙推進器從機身中伸出,由吊艙推進器控制跨介質無人飛行器在水下的運動;準備出水時,保持吊艙推進器仍在水面下為跨介質無人飛行器提供動力,升空前通過液壓系統或電機驅動系統先控制機翼由變后掠角狀態從機身放出后再展開;升空后,通過行星滾柱絲杠升降系統控制吊艙推進器收入機身中,減小飛行時的阻力。
技術研發人員:張國治,高居晗,羅浚仁,張嫵依,顧曉陽,柳汀,趙秋植,劉震
受保護的技術使用者:吉林化工學院
技術研發日:
技術公布日:2024/10/14
- 還沒有人留言評論。精彩留言會獲得點贊!