一種模塊化無人機控制器的制作方法
本發明屬于模塊化無人飛行器,具體涉及一種模塊化無人機控制器。
背景技術:
1、隨著信息技術與人工智能技術的快速發展,無人機領域也再次迎來高速發展的機遇,新技術、新材料、新算法相互融合并創新應用在無人機領域,各類新型無人飛行設備層出不窮。目前無人機已經成為人們生活、生產過程中不可或缺的工具,在不同領域得到廣泛應用,包括軍事、農業植保、電力巡檢、環保檢測、災后救援等領域,新的應用場景還在增速擴展中。其中群無人機的應用,讓人們經常可以看到大規模的無人機文藝表演,特別是在軍事領域上,蜂群無人機概念的提出影響著未來軍事體系的發展。
2、目前已有單位和廠家在設計模塊化的無人機平臺,旨在降低無人機使用成本、提升使用壽命,特別是大規模應用場景下,模塊化無人機可以實現柔性適配和受損零件快速更換,不影響任務的執行和生產目標的實現。現階段模塊化設計大多聚焦于無人機翼片、驅動電機和無人機本體機械零部件等,但是無人機系統中成本最高的控制與通訊系統模塊化設計程度較低。已有的技術中,所提出的控制器模塊化設計方案模塊化、柔性化、智能化程度不高,無法執行較復雜的飛行任務且適配成本較高。
技術實現思路
1、本發明的目的在于提出一種模塊化無人機控制器,解決無人機控制器模塊化設計中模塊化、柔性化、智能化程度不高且應用場景深度不夠等問題,該模塊化無人機控制器,具備硬件自主組態、電源系統自主匹配、驅動系統自主識別、飛行自主穩控、智能建網和人機交互能力強等特點,且安全性、穩定性、便捷性程度高,特別是蜂群無人機領域應用。
2、本發明采用的技術方案如下:一種模塊化無人機控制器,包括主控制器模塊、通訊模塊、電源模塊和驅動模塊;
3、主控制器模塊負責無人機的整體控制,用于完成視頻數據解析、飛行姿態控制、環境識別、信息存儲、人工智能、溫度及高度傳感器信息處理;
4、通訊模塊用于無人機無線鏈路的傳輸與控制,具備導航、無線通訊和自適應動態組網能力,負責與基站和其他飛行器之間進行無線通訊;
5、電源模塊用于電池電量管理與維護,輸出電源管理與分配;
6、驅動模塊用于無飛機電機的控制與動力供應。
7、與現有技術相比,本發明的有益效果為:本發明應用模塊化、智能化設計思路,采用合理的電氣布局,充分考慮系統的人機交互性、可靠性、穩定性和便捷性,提出了一種模塊化無人機控制器,具備硬件自主組態、電源系統自主匹配、驅動系統自主識別、飛行自主穩控、智能建網和人機交互能力強等特點,可在民用和軍用特別是蜂群無人機領域應用。
技術特征:
1.一種模塊化無人機控制器,其特征在于,包括主控制器模塊、通訊模塊、電源模塊和驅動模塊;
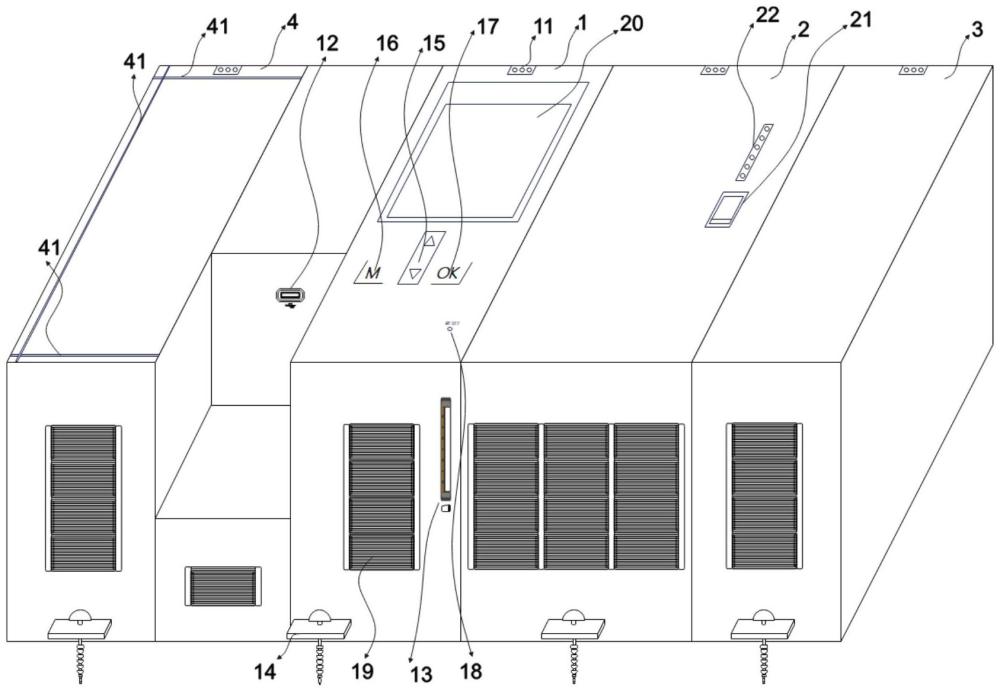
2.根據權利要求1所述的模塊化無人機控制器,其特征在于,所述主控制器模塊(1)一側安裝通訊模塊(4)和其他通訊擴展模塊;主控制器模塊(1)另一側安裝電源模塊(2)和驅動模塊(3)。
3.根據權利要求1所述的模塊化無人機控制器,其特征在于,除電源模塊(2)外,其他模塊均支持在線快速插拔,電源模塊(2)需在電源關閉情況下進行拔插。
4.根據權利要求1所述的模塊化無人機控制器,其特征在于,所述主控制器模塊(1)具備獨立的神經網絡芯片,具備人工智能自主學習能力,能夠智能控制三旋翼、四旋翼、六旋翼和八旋翼無人機。
5.根據權利要求1所述的模塊化無人機控制器,其特征在于,所述主控制器模塊(1)具備液晶顯示屏和按鈕,能夠進行在線編輯,實現控制器版本信息查詢與更新;設備管理、組態與維護;電池電量查詢;通訊狀態監視;電源輸出電流監控。
6.根據權利要求1所述的模塊化無人機控制器,其特征在于,主控制器模塊還具備一鍵復位功能,長按即可對控制器進行出廠設置與故障復位;還具備三個狀態提示燈,分別是電源指示燈、故障指示燈、通訊指示燈;還具備上位機調試usb接口,通過上位機進行系統版本更新與初始化。
7.根據權利要求1所述的模塊化無人機控制器,其特征在于,所述通訊模塊根據需求選用不用的衛星導航定位方式,天線位于通訊模塊上部、下部和左部。
8.根據權利要求1所述的模塊化無人機控制器,其特征在于,電源模塊將驅動模塊與主控制模塊和通訊模塊分隔開,實現動力電與控制電的應用區間物理隔離。
9.根據權利要求8所述的模塊化無人機控制器,其特征在于,電源模塊輸入來自鋰電池,電源模塊采用雙路電源設計;電源模塊的輸出采用獨立供電設計,每路輸出電源來自獨立的穩壓濾波集成電路,每路還具備防短路、防過流、防雷擊功能;電源模塊上設置撥動開關,用于對無人機進行開、關機與重啟操作;具備輸出電源指示燈,用于查看每路電源輸出狀態。
10.根據權利要求1所述的模塊化無人機控制器,其特征在于,所有模塊通過快捷電氣接口與無人機本體電氣安裝底板卡槽相連,同時無人機本體電氣安裝底板上具備防插錯機制,還具備導向槽,防止人員插拔模塊過程損壞電氣接口;所有模塊均使用十字螺絲與電氣安裝底板二次固連;模塊均具備上下散熱網;無人機本體電氣連接底板上方和下方具備進氣和出氣散熱風道。
技術總結
本發明公開了一種模塊化無人機的控制器,包括主控制器模塊、通訊模塊、電源模塊和驅動模塊;主控制器模塊負責無人機的整體控制,具備視頻數據解析、飛行姿態控制、環境識別、信息存儲、人工智能、溫度及高度等傳感器信息處理能力;通訊模塊負責無人機無線鏈路的傳輸與控制,具備導航、無線通訊和自適應動態組網能力,負責與基站和其他飛行器之間進行無線通訊;電源模塊負責電池電量管理與維護,輸出電源管理與分配;驅動模塊負責無飛機電機的控制與動力供應。本發明應用模塊化、智能化設計思路,采用合理的電氣布局,具備硬件自主組態、電源系統自主匹配、驅動系統自主識別、飛行自主穩控、智能建網和人機交互能力強等特點。
技術研發人員:王光華,王驥,韓嘉賓,金永喜,賴慶峰,李力,徐文星,李金宇
受保護的技術使用者:杭州智元研究院有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!