一種純電動船舶的推進系統及其控制方法
本發明涉及船舶,尤其涉及一種純電動船舶的推進系統及其控制方法。
背景技術:
1、現如今,中小型船舶使用的動力能源大多為柴油,為了實現綠色航運,需要將中小型船舶提供動力能源的柴油更改為電能,并以純電動的方式帶動電機運行。
2、現有技術所采用的常用方法是采用動力電池建立微電網,然后微電網給變頻器供電,通過變頻器來控制電機運行。這種控制方式具有較低的能量利用率且控制過程復雜。
技術實現思路
1、本發明提供了一種純電動船舶的推進系統及其控制方法,以解決純電動船舶電能利用率低的問題。
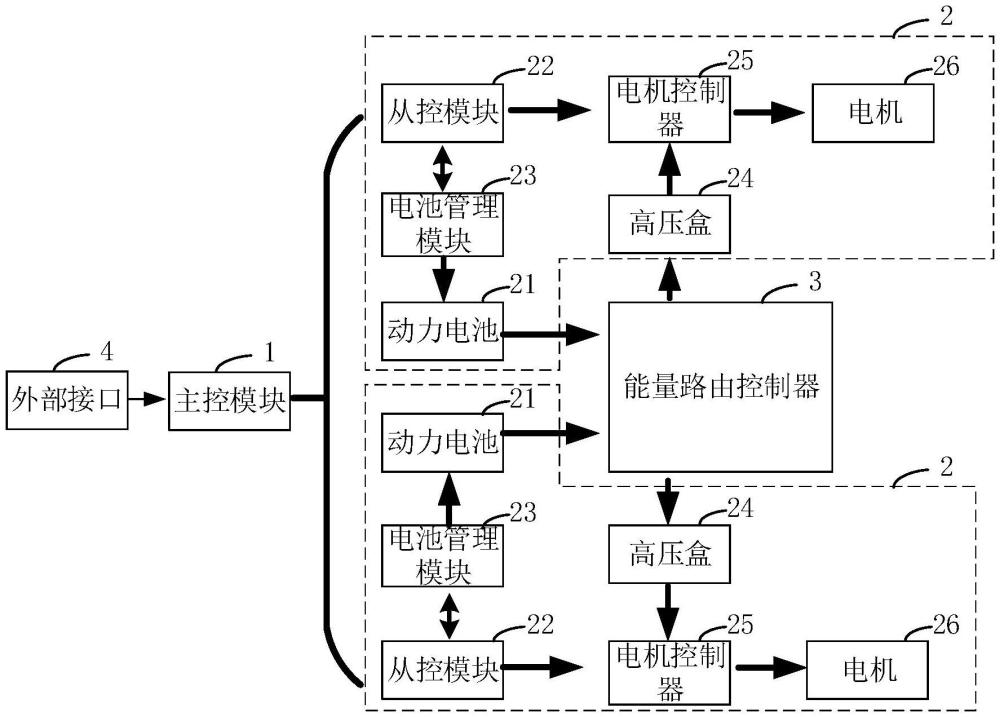
2、根據本發明的一方面,提供了一種純電動船舶的推進系統,包括:
3、主控模塊,所述主控模塊用于與所述推進系統的外部接口連接;
4、至少兩套推進子系統,所述推進子系統包括動力電池、從控模塊、電池管理模塊、高壓盒、電機控制器和電機,所述從控模塊用于與所述主控模塊進行交互,對所述電池管理模塊和所述電機控制器進行控制;
5、能量路由控制器,所述至少兩套推進子系統的動力電池均與所述能量路由控制器電連接,以及所述至少兩套推進子系統的高壓盒均與所述能量路由控制器電連接;所述能量路由控制器對所述至少兩套推進子系統的動力電池的能量進行分配;所述至少兩套推進子系統的動力電池分別在所述至少兩套推進子系統的所述電池管理模塊的控制下通過所述能量路由控制器和所述至少兩套推進子系統的高壓盒對所述至少兩套推進子系統的電機控制器進行控制,以對所述至少兩套推進子系統的電機進行分別控制。
6、可選地,所述推進子系統的數量為兩套,分別為第一推進子系統和第二推進子系統;
7、所述第一推進子系統包括第一動力電池、第一從控模塊、第一電池管理模塊、第一高壓盒、第一電機控制器和第一電機;
8、所述第二推進子系統包括第二動力電池、第二從控模塊、第二電池管理模塊、第二高壓盒、第二電機控制器和第二電機。
9、可選地,純電動船舶的推進系統還包括:
10、備用電池,所述備用電池與所述能量路由控制器電連接。
11、可選地,純電動船舶的推進系統還包括:
12、逆變器,所述逆變器與所述能量路由控制器電連接,所述逆變器用于將所述能量路由控制器輸出的直流逆變為交流,以供船舶日常供電使用。
13、可選地,所述外部接口包括:自動駕駛接口、遠程監控接口、狀態指示接口、多路模擬量輸入接口和界面顯示接口中的至少一種。
14、可選地,所述主控模塊、所述外部接口、至少兩個所述從控模塊、至少兩個所述電機控制器和所述能量路由控制器進行低壓通信信號組網;
15、其中,通信方式包括采用can通訊或485通訊單獨組網;或者,通信方式采用轉換器進行混合組網。
16、根據本發明的另一方面,提供了一種如任意實施例所述的純電動船舶的推進系統的控制方法,包括:
17、所述主控模塊通過所述外部接口獲取調整船姿的指令;
18、所述主控模塊根據所述指令對至少兩個所述從控模塊、以及所述能量路由控制器進行指令調控;
19、至少兩個所述動力電池分別通過對應的所述電池管理模塊與對應的所述從控模塊進行信息交互;以及至少兩個所述動力電池通過所述能量路由控制器向至少兩個所述電機提供動力來源。
20、可選地,所述主控模塊根據所述指令對至少兩個所述從控模塊、以及所述能量路由控制器進行指令調控,包括:
21、若全部所述動力電池正常,則至少兩個所述從控模塊分別控制至少兩個所述動力電池正常供電,且所述能量路由控制器控制至少兩個所述動力電池分別向至少兩個所述電機分別供電;
22、若部分所述動力電池異常,則至少兩個所述從控模塊分別控制異常的所述動力電池停止供電、正常的所述動力電池正常供電,且所述能量路由控制器控制正常的所述動力電池同時向至少兩個所述動力電池供電。
23、可選地,所述推進系統還包括備用電池和逆變器;
24、所述主控模塊根據所述指令對至少兩個所述從控模塊、以及所述能量路由控制器進行指令調控,還包括:
25、若全部所述動力電池正常,則所述能量路由控制器還控制至少兩個所述動力電池向所述逆變器供電;
26、若部分所述動力電池異常,則所述能量路由控制器還控制所述備用電池向所述逆變器供電;
27、若全部所述動力電池異常,則至少兩個所述從控模塊分別控制至少兩個所述動力電池停止供電,且所述能量路由控制器控制所述備用電池分別向至少兩個所述電機和所述逆變器供電。
28、可選地,純電動船舶的推進系統的控制方法還包括:
29、若所述動力電池部分或全部異常,則控制所述純電動船舶降低航行速度。
30、可選地,所述推進子系統的數量為兩套,分別為第一推進子系統和第二推進子系統;所述第一推進子系統包括第一動力電池、第一從控模塊、第一電池管理模塊、第一高壓盒、第一電機控制器和第一電機;所述第二推進子系統包括第二動力電池、第二從控模塊、第二電池管理模塊、第二高壓盒、第二電機控制器和第二電機;
31、所述主控模塊根據所述指令對至少兩個所述從控模塊、以及所述能量路由控制器進行指令調控,還包括:
32、所述主控模塊獲取船舶轉彎角度給定量和船舶轉彎角度實際輸出量的差值,并根據所述差值生成第一轉速指令和第二轉述指令;
33、所述第一從控模塊接收所述第一轉速指令,生成用于控制所述第一電機的第一轉速給定量;所述第一電機控制器根據所述第一轉速給定量和所述第一電機反饋的轉速擾動量,對所述第一電機的轉速進行控制;
34、所述第二從控模塊接收所述第二轉速指令,生成用于控制所述第二電機的第二轉速給定量。所述第二電機控制器根據所述第二轉速給定量和所述第二電機反饋的轉速擾動量,對所述第二電機的轉速進行控制。
35、本發明實施例所提供的技術方案,通過設置電機控制器實現了對電機的直接控制,使各個電機進行協調配合帶動船舶以不同的狀態運行。且當一組動力電池失效時,還可通過另一組動力電池為電機供電,具有較高的可靠性。然而在現有技術中,動力電池輸出的電能需要建立微電網,微電網給變頻器供電,通過變頻器來控制電機運行,也就是說,現有技術需要將動力電池輸出的直流電逆變為交流電,再通過變頻器整流為直流電來為電機供電。因此,與現有技術相比,本發明實施例僅通過電機控制器可直接進行dc-dc的電壓變換,無需進行電能的逆變與整流,控制過程簡單且減小了能量損耗,實現了能量的高效利用,達到了增加續航的目的。
36、應當理解,本部分所描述的內容并非旨在標識本發明的實施例的關鍵或重要特征,也不用于限制本發明的范圍。本發明的其它特征將通過以下的說明書而變得容易理解。
技術特征:
1.一種純電動船舶的推進系統,其特征在于,包括:
2.根據權利要求1所述的純電動船舶的推進系統,其特征在于,所述推進子系統的數量為兩套,分別為第一推進子系統和第二推進子系統;
3.根據權利要求1或2所述的純電動船舶的推進系統,其特征在于,還包括:
4.根據權利要求1或2所述的純電動船舶的推進系統,其特征在于,還包括:
5.根據權利要求1或2所述的純電動船舶的推進系統,其特征在于,所述外部接口包括:自動駕駛接口、遠程監控接口、狀態指示接口、多路模擬量輸入接口和界面顯示接口中的至少一種。
6.根據權利要求1或2所述的純電動船舶的推進系統,其特征在于,所述主控模塊、所述外部接口、至少兩個所述從控模塊、至少兩個所述電機控制器和所述能量路由控制器進行低壓通信信號組網;
7.一種如權利要求1-6任一項所述的純電動船舶的推進系統的控制方法,其特征在于,包括:
8.根據權利要求7所述的純電動船舶的推進系統的控制方法,其特征在于,所述主控模塊根據所述指令對至少兩個所述從控模塊、以及所述能量路由控制器進行指令調控,包括:
9.根據權利要求8所述的純電動船舶的推進系統的控制方法,其特征在于,所述推進系統還包括備用電池和逆變器;
10.根據權利要求8或9所述的純電動船舶的推進系統的控制方法,其特征在于,還包括:
11.根據權利要求7所述的純電動船舶的推進系統的控制方法,其特征在于,所述推進子系統的數量為兩套,分別為第一推進子系統和第二推進子系統;所述第一推進子系統包括第一動力電池、第一從控模塊、第一電池管理模塊、第一高壓盒、第一電機控制器和第一電機;所述第二推進子系統包括第二動力電池、第二從控模塊、第二電池管理模塊、第二高壓盒、第二電機控制器和第二電機;
技術總結
本發明公開了一種純電動船舶的推進系統及其控制方法。該系統包括:主控模塊,用于與推進系統的外部接口連接;至少兩套推進子系統,包括動力電池、從控模塊、電池管理模塊、高壓盒、電機控制器和電機,從控模塊用于與主控模塊進行交互,對電池管理模塊和電機控制器進行控制;能量路由控制器對至少兩套推進子系統的動力電池的能量進行分配;至少兩套推進子系統的動力電池分別在至少兩套推進子系統的電池管理模塊的控制下通過能量路由控制器和至少兩套推進子系統的高壓盒對至少兩套推進子系統的電機控制器進行控制,以對至少兩套推進子系統的電機進行分別控制。本發明實施例所提供的技術方案提高了純電動船舶的電能利用率。
技術研發人員:江再勇,曾濤,王海峰
受保護的技術使用者:中國科學院贛江創新研究院
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!