一種車輛方向盤回正方法、車輛及儲存介質與流程
本發明涉及機動車的轉向機構,尤其涉及一種車輛方向盤回正方法、車輛及儲存介質。
背景技術:
1、車輛在泊車完成后,由于人為操作未將車輛方向盤回正到位或者是受到車輛相關模塊的響應速度和泊車線路算法的限制方向盤未進行回正操作,此時需要車輛在靜止狀態下對方向盤進行回正操作,由于輪胎受到地面摩擦力、輪胎彈性形變等前懸架綜合應力的影響,方向盤在轉動回正后會出現偏轉現象。現時通過對方向盤回正角度進行補償來實現自動泊車結束后方向盤回正操作,而對方向盤回正補償的角度計算依賴大量臺架試驗,需要結合前軸載荷、天氣、輪胎性能、地面條件、車輛轉向系統各部分老化等數據建立試驗后的數據模型,從而使得方向盤可在實際使用中根據不同的使用環境而進行自動回正操作。由此可見,現時對于車輛方向盤自動回正操作研發成本高,并且依賴于研發時建立的數據模型,對于不同的使用環境適應性差,因此,亟需一種易于開發、適應性更好的方向盤回正方法。
技術實現思路
1、本發明目的在于提供一種車輛方向盤回正方法、車輛及儲存介質,以解決現有技術中所存在的一個或多個技術問題,至少提供一種有益的選擇或創造條件。
2、根據本發明第一方面實施例的一種車輛方向盤回正方法,包括:
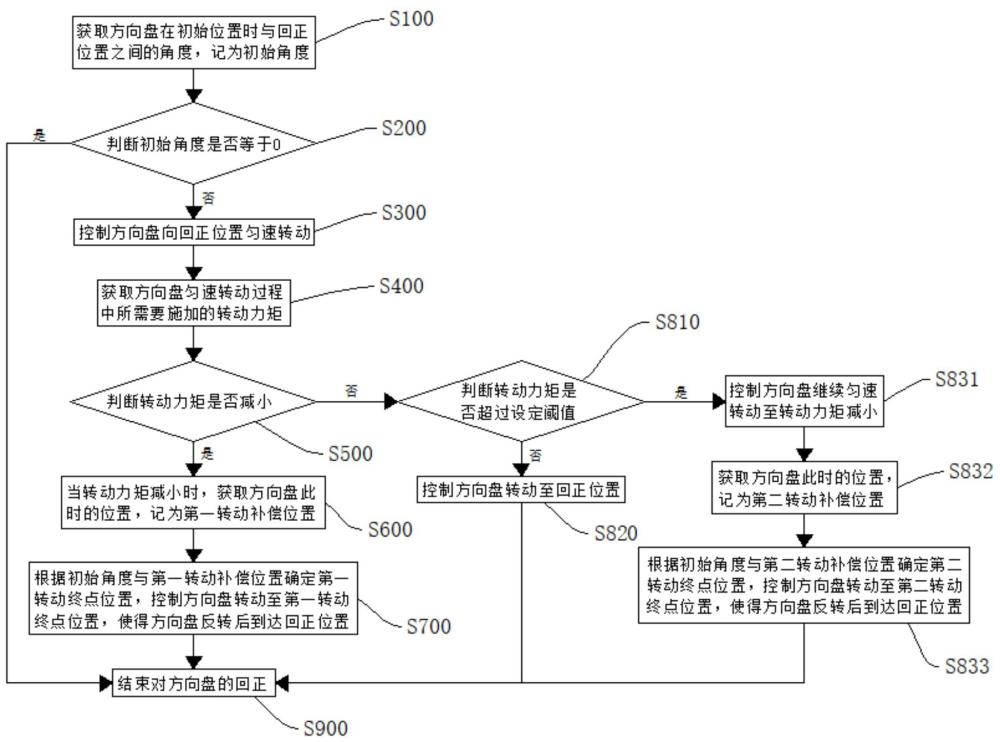
3、獲取所述方向盤在初始位置時與回正位置之間的角度,記為初始角度;
4、判斷所述初始角度是否等于0;
5、當所述初始角度不等于0時,控制所述方向盤向所述回正位置勻速轉動;
6、獲取所述方向盤勻速轉動過程中所需要施加的轉動力矩;
7、判斷所述轉動力矩是否減小;
8、當所述轉動力矩減小時,獲取所述方向盤此時的位置,記為第一轉動補償位置;
9、根據所述初始角度與所述第一轉動補償位置確定第一轉動終點位置,控制所述方向盤轉動至所述第一轉動終點位置,使得所述方向盤反轉后到達所述回正位置。
10、該技術方案至少具有如下的有益效果:獲取此時方向盤距離與回正位置之間形成的角度,回正位置為方向盤在回正時需要達到的位置,一般為方向盤位于居中狀態,當初始角度不等于0時,亦即方向盤未回正,確定需要對方向盤進行回正操作,此時控制方向盤向回正位置勻速轉動,當前懸架綜合應力對輪胎的影響較大時,輪胎與輪轂之間會發相對偏轉,導致輪胎發生彈性形變,與地面之間的摩擦為靜摩擦,隨著方向盤轉動角度增加,對方向盤所需要施加的轉動力矩會逐漸增大,當轉動力矩大于靜摩擦力時,輪胎相對地面滑移,此時輪胎與地面之間的摩擦為滑動摩擦,所需要對方向盤勻速轉動的轉動力矩減小,記錄此時方向盤在勻速轉動時受到轉動力矩減小的位置為第一轉動補償位置,輪胎在初始位置與第一轉動補償位置之間轉動的角度為克服前懸架綜合應力的補償角度,由此結合初始角度確定得到第一轉動終點位置,將方向盤轉動至第一轉動終點位置后,方向盤失去轉動力矩,此時輪胎彈性復原并帶動方向盤反轉,使得方向盤返回至回正位置,如此可對車輛方向盤在不同環境下實現自動回正,通用性更強,并且在生產開發時不需要進行大量臺架試驗進行數據積累,直接在使用時通過對方向盤轉動力矩的反饋確定對前懸架綜合應力的補償,大幅降低了開發成本,提高生產效益。
11、根據本發明的一些實施例,所述車輛方向盤回正方法,還包括:
12、當所述轉動力矩未減小時,判斷所述轉動力矩是否超過設定閾值;
13、當所述轉動力矩未超過所述設定閾值時,控制所述方向盤轉動至所述回正位置。
14、根據本發明的一些實施例,所述車輛方向盤回正方法,還包括:
15、當所述轉動力矩超過所述設定閾值時,控制所述方向盤繼續勻速轉動至所述轉動力矩減小;
16、獲取所述方向盤此時的位置,記為第二轉動補償位置;
17、根據本發明的一些實施例,所述控制所述方向盤轉動至所述第一轉動終點位置,包括:
18、控制所述方向盤從所述第一轉動補償位置向所述第二轉動終點位置勻速轉動。
19、根據所述初始角度與所述第二轉動補償位置確定第二轉動終點位置,控制所述方向盤轉動至所述第二轉動終點位置,使得所述方向盤反轉后到達所述回正位置。
20、根據本發明的一些實施例,所述根據所述初始角度與所述第二轉動補償位置確定第二轉動終點位置,包括:
21、在所述第二轉動補償位置朝遠離所述回正位置的方向將所述方向盤以所述初始角度的數值轉動,所述方向盤轉動終點的位置為所述第二轉動終點位置。
22、根據本發明的一些實施例,所述控制所述方向盤轉動至所述第二轉動終點位置,包括:
23、控制所述方向盤從所述第二轉動補償位置向所述第二轉動終點位置勻速轉動。
24、根據本發明的一些實施例,根據所述初始角度與所述第一轉動補償位置確定第一轉動終點位置,包括:
25、在所述第一轉動補償位置朝遠離所述回正位置的方向將所述方向盤以所述初始角度的數值轉動,所述方向盤轉動終點的位置為所述第一轉動終點位置。
26、根據本發明的一些實施例,所述車輛方向盤回正方法,還包括:
27、當所述初始角度等于0時,結束對所述方向盤的回正。
28、根據本發明第二方面實施例的一種車輛,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的程序,所述程序被所述處理器執行時實現上述的一種車輛方向盤回正方法。
29、該技術方案至少具有如下的有益效果:當車輛需要對方向盤回正時,使用上述的車輛方向盤回正方法,車輛方向盤可在不同環境下實現自動回正,通用性更強,并且在生產開發時不需要進行大量臺架試驗進行數據積累,直接在使用時通過對方向盤轉動力矩的反饋確定對前懸架綜合應力的補償,大幅降低了開發成本,提高生產效益。
30、一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有計算機可執行指令,所述計算機可執行指令用于使計算機執行上述的車輛方向盤回正方法。
31、該技術方案至少具有如下的有益效果:上述的車輛方向盤回正方法可被實現為計算機程序,被有形地包含于計算機可讀存儲介質,當處理器使用此計算機可讀存儲介質對車輛方向盤回正時,可在不同環境下實現自動回正,通用性更強,并且在生產開發時不需要進行大量臺架試驗進行數據積累,直接在使用時通過對方向盤轉動力矩的反饋確定對前懸架綜合應力的補償,大幅降低了開發成本,提高生產效益。
32、本發明的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變
33、得明顯,或通過本發明的實踐了解到。
技術特征:
1.一種車輛方向盤回正方法,其特征在于:包括:
2.根據權利要求1所述的一種車輛方向盤回正方法,其特征在于:所述車輛方向盤回正方法,還包括:
3.根據權利要求2所述的一種車輛方向盤回正方法,其特征在于:所述車輛方向盤回正方法,還包括:
4.根據權利要求3所述的一種車輛方向盤回正方法,其特征在于:所述根據所述初始角度與所述第二轉動補償位置確定第二轉動終點位置,包括:
5.根據權利要求3所述的一種車輛方向盤回正方法,其特征在于:所述控制所述方向盤轉動至所述第二轉動終點位置,包括:
6.根據權利要求3所述的一種車輛方向盤回正方法,其特征在于:所述控制所述方向盤轉動至所述第一轉動終點位置,包括:
7.根據權利要求1所述的一種車輛方向盤回正方法,其特征在于:根據所述初始角度與所述第一轉動補償位置確定第一轉動終點位置,包括:
8.根據權利要求1所述的一種車輛方向盤回正方法,其特征在于:所述車輛方向盤回正方法,還包括:
9.一種車輛,其特征在于:包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的程序,所述程序被所述處理器執行時實現如權利要求1至8任一項所述的一種車輛方向盤回正方法。
10.一種計算機可讀存儲介質,其特征在于:所述計算機可讀存儲介質存儲有計算機可執行指令,所述計算機可執行指令用于使計算機執行如權利要求1至8任一項所述的車輛方向盤回正方法。
技術總結
本發明公開了一種車輛方向盤回正方法、車輛及儲存介質,其中,車輛方向盤回正方法包括:獲取方向盤在初始位置時與回正位置之間的角度,記為初始角度;判斷初始角度是否等于0;當初始角度不等于0時,控制方向盤向回正位置勻速轉動;獲取方向盤勻速轉動過程中所需要施加的轉動力矩;判斷轉動力矩是否減小;當轉動力矩減小時,獲取方向盤此時的位置,記為第一轉動補償位置;根據初始角度與第一轉動補償位置確定第一轉動終點位置,控制方向盤轉動至第一轉動終點位置,使得方向盤反轉后到達回正位置,本發明可對車輛方向盤在不同環境下實現自動回正,并且在生產開發時不需要進行大量臺架試驗進行數據積累,大幅降低了開發成本,提高生產效益。
技術研發人員:韓祖康,劉濤
受保護的技術使用者:中國第一汽車股份有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!