消防機器人的制作方法
本發明涉及消防設備,具體涉及一種消防機器人。
背景技術:
1、在消防救火的過程中經常需要深入火場,搜尋火源,找到正確的救援點才能將火撲滅,但是在空間較為復雜的火場中,消防救援隊員直接進入搜索需要耗費大量體力,加上空呼的時間限制,嚴重影響滅火速度。所以偵查救援機器人對于消防救援來說非常有必要。
2、現有的機器人的行走機構主要有輪式、履帶式和足式。輪式機器人適合平坦的路面,能夠高速移動,但是行動不平穩容易打滑,面對復雜的地形無能為力。履帶式機器人能更好的適應松軟的地形,例如沙地、泥地,并且履帶與地面接觸面積大,不易打滑運行比較平穩,但是其行進速度較輪式機器人差,面對落差大的地形無能為力。足式機器人幾乎可以適應各種復雜地形,能夠翻越各種障礙,但是其行進速度很低,并且由于足式支撐,使得足式機器人重心高不穩定很容易側翻。
技術實現思路
1、本發明要解決的技術問題在于,提供一種消防機器人。
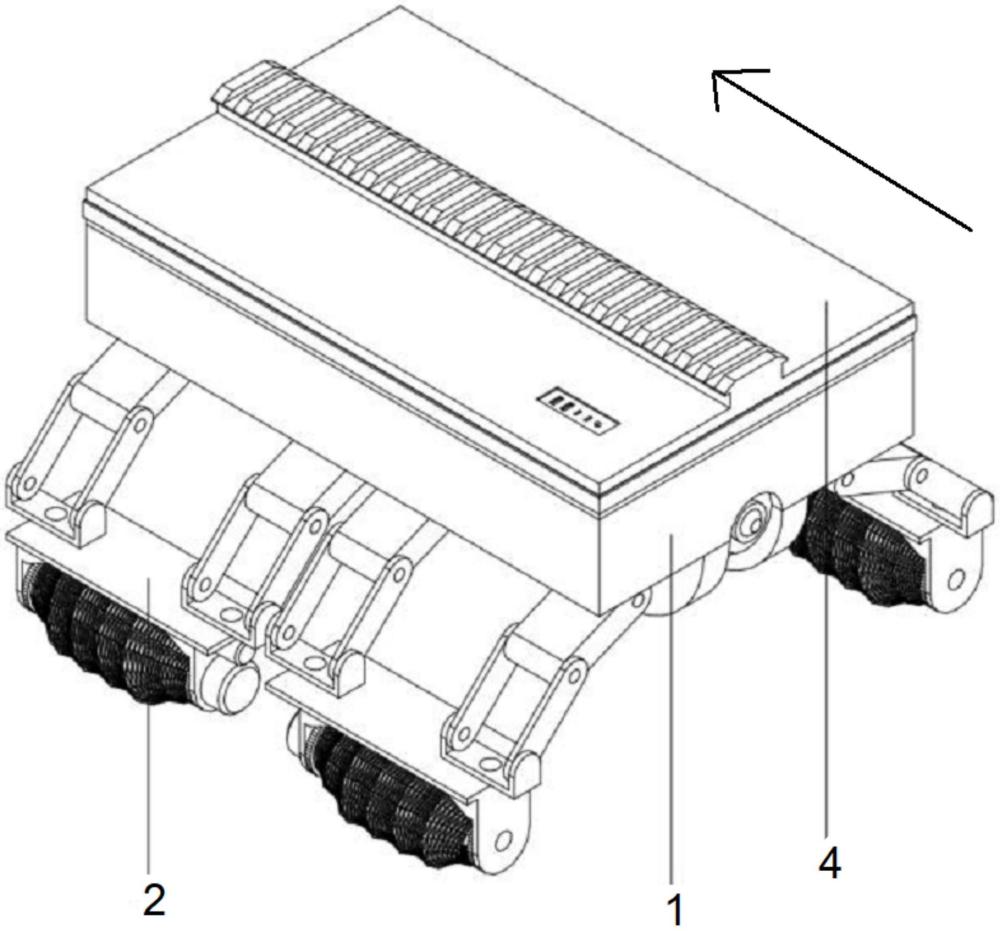
2、本發明解決其技術問題所采用的技術方案是:構造一種消防機器人,其包括主機機構以及與所述主機機構連接的多個行走機構;
3、所述主機機構包括主機外殼、設于所述主機外殼內的控制器、以及與所述控制器通訊連接的旋轉驅動器;
4、每個所述行走機構均包括連接在所述主機外殼底部并可相對所述主機外殼做旋轉運動的旋轉件、與所述旋轉件連接的高度調節組件、與所述高度調節組件連接的萬向連接件、與所述萬向連接件并可相對所述萬向連接件做旋轉運動的輥足支架、以及與所述輥足支架連接的輥足組件,所述旋轉驅動器用于驅動所述旋轉件相對所述主機外殼做旋轉運動。
5、在一些實施例中,所述行走機構的數量為四個,四個所述行走機構均勻分布在所述主機外殼的底部;
6、每個所述行走機構包括兩個所述旋轉件、兩個所述高度調節組件以及兩個所述萬向連接件,兩個所述萬向連接件共同連接一個所述輥足支架。
7、在一些實施例中,所述消防機器人還包括引導線組件,所述引導線組件包括設于所述主機外殼內的自收卷線輥、纏繞在所述自收卷線輥上的引導線本體、以及設于所述引導線本體端部的起點定位環,所述主機外殼上設有供所述引導線本體以及所述起點定位環穿過的引導塊;
8、所述引導線本體為光纖或者led燈條。
9、在一些實施例中,所述高度調節組件包括與所述旋轉件鉸接的第一相連件以及所述第一相連件鉸接的第二相連件,所述第二相連件遠離所述第一相連件的一端鉸接于所述萬向連接件。
10、在一些實施例中,所述輥足組件包括轉動連接于所述輥足支架的輥輪以及設于所述輥足支架上并用于驅動所述輥輪做旋轉運動的輥輪驅動器。
11、在一些實施例中,所述輥輪包括螺旋輥本體、套設在所述螺旋輥本體外部的鏈網本體以及分開設于所述鏈網本體兩端的一對鏈網齒輪;
12、所述輥足組件還包括與其中一個所述鏈網齒輪嚙合連接的傳動齒輪以及設于所述輥足支架上并用于驅動傳動齒輪做旋轉運動的齒輪驅動器。
13、在一些實施例中,所述螺旋輥本體呈橄欖形,所述螺旋輥本體的外部設有螺旋絞龍。
14、在一些實施例中,所述鏈網本體的材質為阻燃防滑材質,所述阻燃防滑材質為金屬或者阻燃尼龍。
15、在一些實施例中,所述消防機器人還包括蓋合于所述主機外殼頂部的定位機蓋,所述定位機蓋的頂面上設有皮卡汀尼導軌以及供電接口,所述定位機蓋的周側面上圍設有發光燈帶。
16、在一些實施例中,所述主機外殼上設有攝像頭。
17、實施本發明具有以下有益效果:該消防機器人通過多個行走機構的設置,能實現輪式和足式兩種方式的行走,即可以只通過足式爬行,保證通過性,也可以只通過輪式行駛,提高行走速度,還可以輪足相互配合動作,同時兼顧行走速度和通過性,大大提高了消防機器人在搜索救援點的過程中的作業效率。
技術特征:
1.一種消防機器人,其特征在于,包括主機機構(1)以及與所述主機機構(1)連接的多個行走機構(2);
2.根據權利要求1所述的消防機器人,其特征在于,所述行走機構(2)的數量為四個,四個所述行走機構(2)均勻分布在所述主機外殼(11)的底部;
3.根據權利要求1所述的消防機器人,其特征在于,所述消防機器人還包括引導線組件(3),所述引導線組件(3)包括設于所述主機外殼(11)內的自收卷線輥(31)、纏繞在所述自收卷線輥(31)上的引導線本體(32)、以及設于所述引導線本體(32)端部的起點定位環(33),所述主機外殼(11)上設有供所述引導線本體(32)以及所述起點定位環(33)穿過的引導塊(34);
4.根據權利要求1所述的消防機器人,其特征在于,所述高度調節組件(23)包括與所述旋轉件(22)鉸接的第一相連件(231)以及所述第一相連件(231)鉸接的第二相連件(232),所述第二相連件(232)遠離所述第一相連件(231)的一端鉸接于所述萬向連接件(24)。
5.根據權利要求1所述的消防機器人,其特征在于,所述輥足組件(26)包括轉動連接于所述輥足支架(25)的輥輪(261)以及設于所述輥足支架(25)上并用于驅動所述輥輪(261)做旋轉運動的輥輪驅動器(262)。
6.根據權利要求5所述的消防機器人,其特征在于,所述輥輪(261)包括螺旋輥本體(2611)、套設在所述螺旋輥本體(2611)外部的鏈網本體(2612)以及分開設于所述鏈網本體(2612)兩端的一對鏈網齒輪(2613);
7.根據權利要求6所述的消防機器人,其特征在于,所述螺旋輥本體(2611)呈橄欖形,所述螺旋輥本體(2611)的外部設有螺旋絞龍。
8.根據權利要求6所述的消防機器人,其特征在于,所述鏈網本體(2612)的材質為阻燃防滑材質,所述阻燃防滑材質為金屬或者阻燃尼龍。
9.根據權利要求1所述的消防機器人,其特征在于,所述消防機器人還包括蓋合于所述主機外殼(11)頂部的定位機蓋(4),所述定位機蓋(4)的頂面上設有皮卡汀尼導軌(41)以及供電接口(42),所述定位機蓋(4)的周側面上圍設有發光燈帶(43)。
10.根據權利要求1所述的消防機器人,其特征在于,所述主機外殼(11)上設有攝像頭(5)。
技術總結
本發明公開一種消防機器人,其包括主機機構以及與主機機構連接的多個行走機構,主機機構包括主機外殼、設于主機外殼內的控制器、以及與控制器通訊連接的旋轉驅動器,每個行走機構均包括連接在主機外殼底部并可相對主機外殼做旋轉運動的旋轉件、與旋轉件連接的高度調節組件、與高度調節組件連接的萬向連接件、與萬向連接件并可相對萬向連接件做旋轉運動的輥足支架、以及與輥足支架連接的輥足組件,旋轉驅動器用于驅動旋轉件相對主機外殼做旋轉運動。該消防機器人通過多個行走機構的設置,能實現輪式和足式兩種方式的行走,大大提高了消防機器人在搜索救援點的過程中的作業效率。
技術研發人員:劉闊,曾會彬,劉文元,張和林
受保護的技術使用者:福建寧德核電有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!