基于路面識別和可用驅動功率的車輛駕駛控制方法及系統與流程
本發明屬于車輛駕駛控制,具體涉及一種基于路面識別和可用驅動功率的車輛駕駛控制方法及系統。
背景技術:
1、車輛在不同路面行駛時,路面的附著系數對駕駛性影響明顯。在高附著路面上,車輛可以更快的加速和行駛;在低附著路面上,快速的加速和高速行駛,容易導致車輛失穩,造成安全事故。同時,新能源汽車的驅動功率來自于動力電池包,高動力電池的可用功率可以支持車輛更快的加速和行駛,低動力電池的可用功率會使得車輛加速性能受限。
2、車輛在高附著路面,使用高動力電池的可用驅動功率,可以安全快速的加速和行駛;車輛在高附著路面,使用低動力電池的可用驅動功率,同樣的加速性能,會使得車輛快速加速后立馬進入限功率狀態,導致加速力丟失,駕駛體驗差。車輛在低附著路面,使用低動力電池的可用驅動功率,如果不提前調整加速性能,會使得車輛容易打滑并立馬進入限功率狀態,打滑加限功率會導致更加明顯的加速力丟失,引起車輛震蕩,駕駛體驗差。
3、目前,現有技術是根據附著系數計算目標滑移率,當車輛發生打滑時,再主動限制驅動扭矩,即驅動防滑功能,這種方式由于不主動調整加速性能,在低附路面,駕駛員踩油門時會頻繁打滑,然后觸發降扭,帶來不好的駕駛體驗。
4、因此,判斷車輛行駛路況和計算可用驅動功率,主動提前調整車輛加速性能,避免車輛頻繁打滑和觸發限功率,能夠使車輛擁有更安全、更好的駕駛體驗。
技術實現思路
1、基于此,本技術提出一種基于路面識別和可用驅動功率的車輛駕駛控制方法及系統,旨通過判斷車輛行駛路況和計算可用驅動功率,主動提前調整車輛加速性能,避免車輛頻繁打滑和觸發限功率,能夠使車輛擁有更安全、更好的駕駛體驗。
2、本技術的第一方面提供了一種基于路面識別和可用驅動功率的車輛駕駛控制方法,所述方法包括:
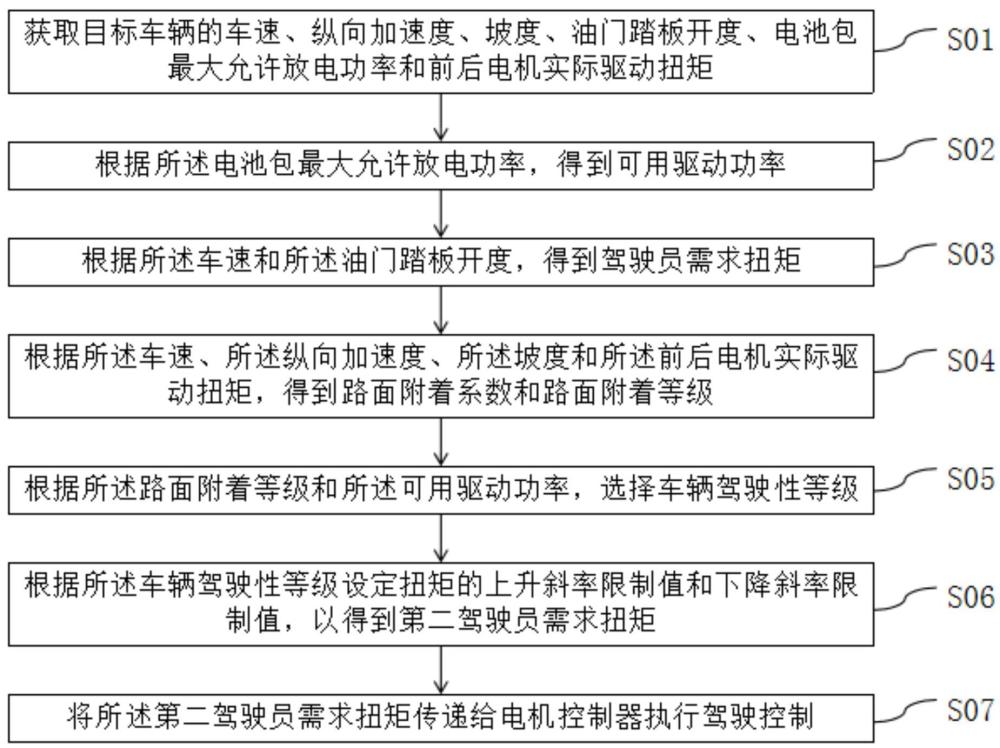
3、獲取目標車輛的車速、縱向加速度、坡度、油門踏板開度、電池包最大允許放電功率和前后電機實際驅動扭矩;
4、根據所述電池包最大允許放電功率,得到可用驅動功率;
5、根據所述車速和所述油門踏板開度,得到駕駛員需求扭矩;
6、根據所述車速、所述縱向加速度、所述坡度和所述前后電機實際驅動扭矩,得到路面附著系數和路面附著等級;
7、根據所述路面附著等級和所述可用驅動功率,選擇車輛駕駛性等級;
8、根據所述車輛駕駛性等級設定扭矩的上升斜率限制值和下降斜率限制值,并基于所述駕駛員需求扭矩得到第二駕駛員需求扭矩;
9、將所述第二駕駛員需求扭矩傳遞給電機控制器執行駕駛控制。
10、與現有技術相比,本技術提供了一種基于路面識別和可用驅動功率的車輛駕駛控制方法,該方法通過獲取車輛狀態參數,如車速、縱向加速度、坡度等,可以準確判斷當前路面附著狀況;根據路面附著狀況和可用驅動功率,選擇合適的車輛駕駛性等級,提高車輛駕駛穩定性和安全性;通過設定扭矩上升和下降斜率限制值,可以平滑地調整駕駛員需求扭矩,避免突然加速或減速,提高駕駛舒適性;將優化后的駕駛員需求扭矩傳遞給電機控制器執行,可以實現車輛的精準駕駛控制,提高整體駕駛體驗。
11、作為第一方面的一種可選實施方式,根據所述電池包最大允許放電功率,得到可用驅動功率的步驟包括:
12、從電池包最大允許放電功率中減去目標車輛的待預留功率,得到可用驅動功率。
13、作為第一方面的一種可選實施方式,根據所述車速和所述油門踏板開度,得到駕駛員需求扭矩的步驟包括:
14、分別確定車速和油門踏板開度的范圍,將范圍分別進行等級劃分,得到不同的車速等級和油門踏板開度等級;
15、創建預設標定map二維網格,其中,橫軸用于表示車速等級,縱軸用于表示油門踏板開度等級,每個網格點用于表示駕駛員需求扭矩;
16、基于所述預設標定map二維網格,得到駕駛員需求扭矩。
17、作為第一方面的一種可選實施方式,根據所述車速、所述縱向加速度、所述坡度和所述前后電機實際驅動扭矩,得到路面附著系數和路面附著等級的步驟包括:
18、獲取目標車輛的整車屬性信息,所述整車屬性信息包括整車質量、前后軸到質心的距離和車輛質心離地高度;根據車速、縱向加速度、坡度,以及結合所述整車屬性信息,獲得目標車輛的前后軸動態垂向載荷;
19、獲取目標車輛的輪胎屬性信息,所述輪胎屬性信息包括輪胎轉動慣量、輪胎角加速度和輪胎半徑;根據前后電機實際驅動扭矩和所述輪胎屬性信息,獲得目標車輛的輪胎地面力;
20、根據所述前后軸動態垂向載荷和所述輪胎地面力獲得路面附著系數;
21、對所述路面附著系數進行等級劃分,獲得路面附著等級。
22、作為第一方面的一種可選實施方式,根據所述路面附著等級和所述可用驅動功率,選擇車輛駕駛性等級的步驟包括:
23、將可用驅動功率劃分為可用驅動功率等級;
24、創建車輛駕駛性等級二維網絡,其中,橫軸用于表示路面附著等級,縱軸用于表示可用驅動功率等級,每個網格點用于表示車輛駕駛性等級;
25、基于所述輛駕駛性等級二維網絡,選擇車輛駕駛性等級。
26、作為第一方面的一種可選實施方式,根據所述車輛駕駛性等級設定扭矩的上升斜率限制值和下降斜率限制值,并基于所述駕駛員需求扭矩得到第二駕駛員需求扭矩的步驟包括:
27、判斷駕駛員需求扭矩和上一周期的第二駕駛員需求扭矩的大小關系:
28、若所述駕駛員需求扭矩大于上一周期的第二駕駛員需求扭矩,則下一周期的第二駕駛員需求扭矩為上一周期的第二駕駛員需求扭矩加上上升斜率限制值;
29、若所述駕駛員需求扭矩小于上一周期的第二駕駛員需求扭矩,則下一周期的第二駕駛員需求扭矩為上一周期的第二駕駛員需求扭矩加上下降斜率限制值。
30、本技術實施例的第二方面提供了一種基于路面識別和可用驅動功率的車輛駕駛控制系統,所述系統包括:
31、數據獲取模塊,用于獲取目標車輛的車速、縱向加速度、坡度、油門踏板開度、電池包最大允許放電功率和前后電機實際驅動扭矩;
32、第一數據處理模塊,用于根據所述電池包最大允許放電功率,得到可用驅動功率;
33、第二數據處理模塊,用于根據所述車速和所述油門踏板開度,得到駕駛員需求扭矩;
34、第三數據處理模塊,用于根據所述車速、所述縱向加速度、所述坡度和所述前后電機實際驅動扭矩,得到路面附著系數和路面附著等級;
35、第四數據處理模塊,用于根據所述路面附著等級和所述可用驅動功率,選擇車輛駕駛性等級;
36、數據輸出模塊,用于根據所述車輛駕駛性等級設定扭矩的上升斜率限制值和下降斜率限制值,并基于所述駕駛員需求扭矩得到第二駕駛員需求扭矩;
37、執行控制模塊,用于將所述第二駕駛員需求扭矩傳遞給電機控制器執行駕駛控制。
38、作為第二方面的一種可選實施方式,所述第三數據處理模塊包括:
39、第一信息處理單元,用于獲取目標車輛的整車屬性信息,所述整車屬性信息包括整車質量、前后軸到質心的距離和車輛質心離地高度;根據車速、縱向加速度、坡度,以及結合所述整車屬性信息,獲得目標車輛的前后軸動態垂向載荷;
40、第二信息處理單元,用于獲取目標車輛的輪胎屬性信息,所述輪胎屬性信息包括輪胎轉動慣量、輪胎角加速度和輪胎半徑;根據前后電機實際驅動扭矩和所述輪胎屬性信息,獲得目標車輛的輪胎地面力;
41、第三信息處理單元,用于根據所述前后軸動態垂向載荷和所述輪胎地面力獲得路面附著系數;
42、第四信息處理單元,用于對所述路面附著系數進行等級劃分,獲得路面附著等級。
43、本技術實施例的第三方面提供了一種計算機設備,所述計算機設備包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的處理程序,所述處理程序被所述處理器執行時實現上述一種基于路面識別和可用驅動功率的車輛駕駛控制方法。
44、本技術實施例的第四方面提供了一種存儲介質,所述存儲介質上存儲有處理程序,所述處理程序被處理器運行時執行上述一種基于路面識別和可用驅動功率的車輛駕駛控制方法。
45、本技術的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本技術的實施例了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!