一種LED車燈的控制方法及裝置與流程
本發明涉及種led車燈,特別是指一種led車燈的控制方法及裝置。
背景技術:
1、傳統的車燈設計只能提供固定的照明范圍和角度。這意味著,不論車輛是在高速行駛、低速轉彎,還是面對復雜多變的路況,車燈的照明效果都保持不變。然而,在實際駕駛過程中,車輛的行駛狀態和路況是千變萬化的。固定的照明模式無法滿足這些多變的需求,有時甚至會造成視線不清或盲區,增加駕駛風險。
2、例如,當車輛在彎道行駛時,傳統的車燈無法充分照亮彎道內側,導致駕駛員難以判斷前方路況;而在高速公路上行駛時,固定的照明角度又可能使得遠方的路況模糊不清。此外,面對雨雪、霧霾等惡劣天氣,傳統的車燈更顯得力不從心,其固定的照明模式難以穿透復雜的天氣條件,為駕駛員提供清晰、足夠的視線。
技術實現思路
1、本發明要解決的技術問題是提供一種led車燈的控制方法及裝置,提高了車燈的照明效果和行車安全性。
2、為解決上述技術問題,本發明的技術方案如下:
3、第一方面,一種led車燈的控制方法,所述方法包括:
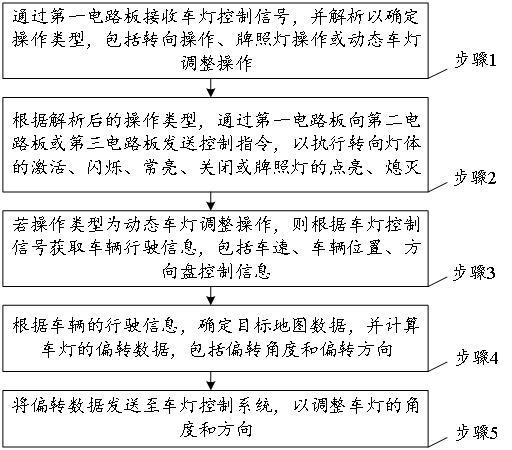
4、通過第一電路板接收車燈控制信號,并解析以確定操作類型,包括轉向操作、牌照燈操作或動態車燈調整操作;
5、根據解析后的操作類型,通過第一電路板向第二電路板或第三電路板發送控制指令,以執行轉向燈體的激活、閃爍、常亮、關閉或牌照燈的點亮、熄滅;
6、若操作類型為動態車燈調整操作,則根據車燈控制信號獲取車輛行駛信息,包括車速、車輛位置、方向盤控制信息;
7、根據車輛的行駛信息,確定目標地圖數據,并計算車燈的偏轉數據,包括偏轉角度和偏轉方向;
8、將偏轉數據發送至車燈控制系統,以調整車燈的角度和方向。
9、進一步的,通過第一電路板接收車燈控制信號,并解析以確定操作類型,包括轉向操作、牌照燈操作或動態車燈調整操作,包括:
10、第一電路板監聽車輛控制系統的車燈控制信號;
11、當第一電路板接收車燈控制信號時,板上的控制器解析控制信號,解析過程包括識別信號的格式、提取關鍵信息,包括操作類型、亮度級別、持續時間;
12、根據解析的信息,第一電路板確定執行的操作類型,包括轉向操作、牌照燈操作或動態車燈調整操作。
13、進一步的,根據解析后的操作類型,通過第一電路板向第二電路板或第三電路板發送控制指令,以執行轉向燈體的激活、閃爍、常亮、關閉或牌照燈的點亮、熄滅,包括:
14、根據解析的操作類型,第一電路板上的控制器生成對應的控制指令;
15、第一電路板通過引線孔將編碼后的控制指令發送至第二電路板或第三電路板;
16、第二電路板或第三電路板接收第一電路板的控制指令,并進行解碼和驗證;
17、根據接收的控制指令,第二電路板或第三電路板驅動對應的led燈珠執行指定的操作,以實現轉向燈的激活、閃爍、常亮、關閉,或牌照燈的點亮、熄滅。
18、進一步的,執行控制指令后,通過第一電路板監測轉向組件、牌照燈和車燈控制系統的工作狀態;
19、若在監測過程中,第一電路板檢測轉向組件、牌照燈或車燈控制系統的工作狀態異常,將立即發送警報信號,以提示系統故障。
20、進一步的,車燈的偏轉角度計算公式為:;
21、其中,表示車燈的偏轉角度;、、、表示調整系數;表示車速;表示車速的指數參數;表示自然對數的底數;表示方向盤轉角;表示方向盤轉角的參考值;表示行駛軌跡偏差;、表示行駛軌跡偏差的指數參數;表示常數項。
22、進一步的,車燈的偏轉方向計算公式為:;
23、其中,表示車燈的偏轉方向;表示預設的角度值;表示方向盤轉角的線性調整系數;表示方向盤轉角的非線性影響;表示方向盤的最大可能轉角;表示車速調整系數;表示行駛軌跡偏差調整系數。
24、進一步的,將偏轉數據發送至車燈控制系統,以調整車燈的角度和方向,包括:
25、將偏轉數據,通過通信連接發送至車燈控制系統;
26、車燈控制系統通過通信接口接收第一電路板的偏轉數據,并進行解碼和處理,以提取偏轉角度和方向調整量;
27、根據偏轉角度和方向調整量,車燈控制系統生成對應的控制信號;
28、控制信號發送至車燈的機械結構,包括伺服電機、步進電機執行機構;
29、執行機構根據接收的控制信號,對車燈進行角度和方向調整。
30、第二方面,一種led車燈的控制裝置,包括:
31、獲取模塊,用于通過第一電路板接收車燈控制信號,并解析以確定操作類型,包括轉向操作、牌照燈操作或動態車燈調整操作;根據解析后的操作類型,通過第一電路板向第二電路板或第三電路板發送控制指令,以執行轉向燈體的激活、閃爍、常亮、關閉或牌照燈的點亮、熄滅;
32、處理模塊,用于若操作類型為動態車燈調整操作,則根據車燈控制信號獲取車輛行駛信息,包括車速、車輛位置、方向盤控制信息;根據車輛的行駛信息,確定目標地圖數據,并計算車燈的偏轉數據,包括偏轉角度和偏轉方向;將偏轉數據發送至車燈控制系統,以調整車燈的角度和方向。
33、第三方面,一種計算設備,包括:
34、一個或多個處理器;
35、存儲裝置,用于存儲一個或多個程序,當所述一個或多個程序被所述一個或多個處理器執行,使得所述一個或多個處理器實現所述的方法。
36、第四方面,一種計算機可讀存儲介質,所述計算機可讀存儲介質中存儲有程序,該程序被處理器執行時實現所述的方法。
37、本發明的上述方案至少包括以下有益效果:
38、該方法能夠接收并解析多種車燈控制信號,從而確定不同的操作類型,如轉向操作、牌照燈操作或動態車燈調整操作。這種靈活性使得車燈系統能夠根據不同的駕駛需求和場景進行快速、準確的響應。在動態車燈調整操作中,能夠根據車輛行駛信息(如車速、車輛位置、方向盤控制信息等)智能地計算車燈的偏轉數據。這種智能化調整不僅提高了夜間或惡劣天氣條件下的行車安全性,還能優化照明范圍,減少對其他道路使用者的干擾。
39、通過第一電路板接收并處理車燈控制信號,然后向第二或第三電路板發送控制指令,實現了高效的數據處理與傳輸。這種設計減少了系統延遲,確保了車燈控制的實時性和準確性。通過精確控制車燈的激活、閃爍、常亮、關閉等操作,以及動態調整車燈的角度和方向,提升了駕駛者的視野范圍和行車安全性,從而改善了整體駕駛體驗。
技術特征:
1.一種led車燈的控制方法,其特征在于,所述方法包括:
2.根據權利要求1所述的led車燈的控制方法,其特征在于,通過第一電路板接收車燈控制信號,并解析以確定操作類型,包括轉向操作、牌照燈操作或動態車燈調整操作,包括:
3.根據權利要求2所述的led車燈的控制方法,其特征在于,根據解析后的操作類型,通過第一電路板向第二電路板或第三電路板發送控制指令,以執行轉向燈體的激活、閃爍、常亮、關閉或牌照燈的點亮、熄滅,包括:
4.根據權利要求3所述的led車燈的控制方法,其特征在于,執行控制指令后,通過第一電路板監測轉向組件、牌照燈和車燈控制系統的工作狀態;
5.根據權利要求4所述的led車燈的控制方法,其特征在于,車燈的偏轉角度計算公式為:;
6.根據權利要求5所述的led車燈的控制方法,其特征在于,車燈的偏轉方向計算公式為:;
7.根據權利要求6所述的led車燈的控制方法,其特征在于,將偏轉數據發送至車燈控制系統,以調整車燈的角度和方向,包括:
8.一種led車燈的控制裝置,其特征在于,實現如權利要求1至7中任一項所述的方法,包括:
9.一種計算設備,其特征在于,包括:
10.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質中存儲有程序,該程序被處理器執行時實現如權利要求1至7中任一項所述的方法。
技術總結
本發明提供一種LED車燈的控制方法及裝置,涉及種LED車燈技術領域,所述方法包括:通過第一電路板接收車燈控制信號,并解析以確定操作類型,包括轉向操作、牌照燈操作或動態車燈調整操作;根據解析后的操作類型,通過第一電路板向第二電路板或第三電路板發送控制指令,以執行轉向燈體的激活、閃爍、常亮、關閉或牌照燈的點亮、熄滅;若操作類型為動態車燈調整操作,則根據車燈控制信號獲取車輛行駛信息,包括車速、車輛位置、方向盤控制信息。本發明根據車輛行駛信息和方向盤控制信息動態調整車燈的角度、方向和亮度,從而提高了行車安全性和照明質量。
技術研發人員:應鴻峰
受保護的技術使用者:浙江保鏢電子有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!