車輛控制方法、裝置、設備、存儲介質及產品與流程
本發明屬于車輛,尤其涉及一種車輛控制方法、裝置、設備、存儲介質及產品。
背景技術:
1、隨著汽車技術的不斷發展,車輛動力學控制成為了提高駕駛安全性和乘坐舒適性的重要手段。車輛動力學是研究車輛在行駛過程中受到的各種力和力矩的作用,以及這些力和力矩如何影響車輛運動狀態的科學。它涵蓋了車輛的操縱穩定性、制動性、平順性等多個性能指標,是車輛工程領域的重要基礎。
2、而在車輛設計和制造過程中,往往需要同時考慮多個性能指標,如操控穩定性、舒適性、節能性、安全性等。這些目標之間往往存在相互矛盾和制約的關系,因此需要通過多目標控制來實現它們的平衡和優化。多目標控制的目標是在滿足所有性能指標的前提下,找到一種最優的控制策略,使得車輛的整體性能達到最佳。
3、但是現有的車輛動力學控制系統通常選擇固定參數作為多目標優化求解的權重因子,無法適應多變的駕駛工況,導致車輛在行駛過程中性能不穩定。
技術實現思路
1、本申請實施例提供一種車輛控制方法、裝置、設備、存儲介質及產品,以解決現有的車輛在行駛過程中性能不穩定的問題。
2、第一方面,本申請實施例提供一種車輛控制方法,所述方法包括:
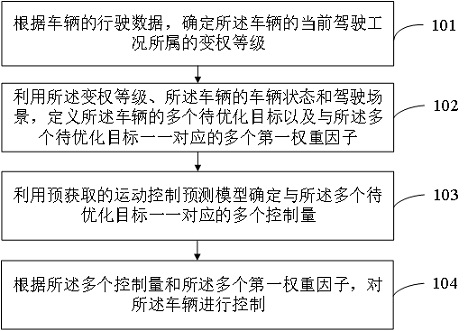
3、根據車輛的行駛數據,確定所述車輛的當前駕駛工況所屬的變權等級,所述變權等級為所述車輛在所述當前駕駛工況下所需達到的駕駛狀態;
4、利用所述變權等級、所述車輛的車輛狀態和駕駛場景,定義所述車輛的多個待優化目標以及與所述多個待優化目標一一對應的多個第一權重因子,其中,所述第一權重因子為動態變化的;
5、利用預獲取的運動控制預測模型確定與所述多個待優化目標一一對應的多個控制量;
6、根據所述多個控制量和所述多個第一權重因子,對所述車輛進行控制。
7、第二方面,本申請實施例提供一種車輛控制裝置,所述裝置包括:
8、第一確定模塊,用于根據車輛的行駛數據,確定所述車輛的當前駕駛工況所屬的變權等級,所述變權等級為所述車輛在所述當前駕駛工況下所需達到的駕駛狀態;
9、定義模塊,用于利用所述變權等級、所述車輛的車輛狀態和駕駛場景,定義所述車輛的多個待優化目標以及與所述多個待優化目標一一對應的多個第一權重因子,其中,所述第一權重因子為動態變化的;
10、第二確定模塊,用于利用預獲取的運動控制預測模型確定與所述多個待優化目標一一對應的多個控制量;
11、第一控制模塊,用于根據所述多個控制量和所述多個第一權重因子,對所述車輛進行控制。
12、第三方面,本申請實施例提供了一種終端設備,設備包括:處理器以及存儲有計算機程序指令的存儲器;
13、處理器執行計算機程序指令時實現如第一方面的車輛控制方法。
14、第四方面,本申請實施例提供了一種計算機存儲介質,計算機可讀存儲介質上存儲有計算機程序指令,計算機程序指令被處理器執行時實現如第一方面的車輛控制方法。
15、第五方面,本申請實施例提供了一種計算機程序產品,計算機程序產品中的指令由電子設備的處理器執行時,使得電子設備執行如第一方面的車輛控制方法。
16、本發明實施例的車輛控制方法、裝置、設備、存儲介質及產品,在本實施例中,通過確定車輛當前駕駛工況所屬的變權等級,再通過變權等級確定車輛在行駛過程中的待優化目標以及對待優化目標進行優化時的可動態變化的第一權重因子,解決了現有技術中只能選擇固定參數作為多目標優化求解的權重因子的問題,同時利用第一權重因子和對多個待優化目標一一對應的控制量共同對車輛進行控制,實現了對車輛控制的靈活性和精準性。通過動態變化的第一權重因子,不僅能夠適應多變的駕駛工況,還能夠根據實時的行駛數據和駕駛場景智能調整控制策略,在復雜多變的駕駛環境中保持車輛的安全性和舒適性。
技術特征:
1.一種車輛控制方法,其特征在于,所述方法包括:
2.如權利要求1所述的車輛控制方法,其特征在于,所述根據車輛的行駛數據,確定所述車輛的當前駕駛工況所屬的變權等級,包括:
3.如權利要求1所述的車輛控制方法,其特征在于,所述利用所述變權等級、所述車輛的車輛狀態和駕駛場景,定義所述車輛的多個待優化目標以及與所述多個待優化目標一一對應的多個第一權重因子,包括:
4.如權利要求1所述的車輛控制方法,其特征在于,所述根據所述多個控制量和所述多個第一權重因子,對所述車輛進行控制之后,所述方法還包括:
5.如權利要求1所述的車輛控制方法,其特征在于,所述根據所述多個控制量和所述多個第一權重因子,對所述車輛進行控制之后,所述方法還包括:
6.一種車輛控制裝置,其特征在于,所述裝置包括:
7.一種終端設備,其特征在于,所述設備包括:處理器以及存儲有計算機程序指令的存儲器;
8.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質上存儲有計算機程序指令,所述計算機程序指令被處理器執行時實現如權利要求1-5任意一項所述的車輛控制方法。
9.一種計算機程序產品,其特征在于,計算機產品包括計算機程序,所述計算機程序被處理器執行時實現權利要求1-5任意一項所述的車輛控制方法。
技術總結
本發明實施例提供了一種車輛控制方法、裝置、設備、存儲介質及產品,所述方法包括:根據車輛的行駛數據,確定所述車輛的當前駕駛工況所屬的變權等級,所述變權等級為所述車輛在所述當前駕駛工況下所需達到的駕駛狀態;利用所述變權等級、所述車輛的車輛狀態和駕駛場景,定義所述車輛的多個待優化目標以及與所述多個待優化目標一一對應的多個第一權重因子,其中,所述第一權重因子為動態變化的;利用預獲取的運動控制預測模型確定與所述多個待優化目標一一對應的多個控制量;根據所述多個控制量和所述多個第一權重因子,對所述車輛進行控制。通過上述步驟,能夠保持車輛在多變駕駛工況下的性能穩定。
技術研發人員:王德平,徐月云,郝斌,侯杰,張玉峰,高鎮海,朱學武,張慶,朱冰,王鶴,鄭義
受保護的技術使用者:國汽(北京)智能網聯汽車研究院有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!