一種基于電子地圖的商用車碰撞風險估計方法、系統、車輛及存儲介質與流程
本發明屬于商用車智能駕駛,具體涉及一種基于電子地圖的商用車碰撞風險估計方法、系統、車輛及存儲介質。
背景技術:
1、目前,重型商用車具有載重量大,能夠長途運輸,滿足多種運輸需求。而重型商用車的安全行駛,也是當前主要關注的方向。
2、重型商用車的自動緊急制動系統受行駛道路環境影響較大,車輛在上坡下坡過程中由于自車的車重過大導致行駛狀態受坡度影響大,碰撞風險計算的差異較大。
3、現有技術中,重型商用車自動緊急制動系統只考慮當前自車車輛狀態和目標車輛狀態,并基于當前車輛狀態進行碰撞風險估計,這容易導致車輛行駛在不同坡度的道路時會出現自動緊急制動系統制動表現不一致的情況,造成風險評估精度低,最終導致在下坡路段時由于智能駕駛輔助系統介入晚、制動力介入晚而難以保證車輛與駕駛員的人身財產安全。
技術實現思路
1、本發明提供一種基于電子地圖的商用車碰撞風險估計方法,方法可以解決重型商用車自動緊急制動系統在碰撞風險計算過程中受行駛道路影響大,風險評估精度低的問題。
2、方法包括:
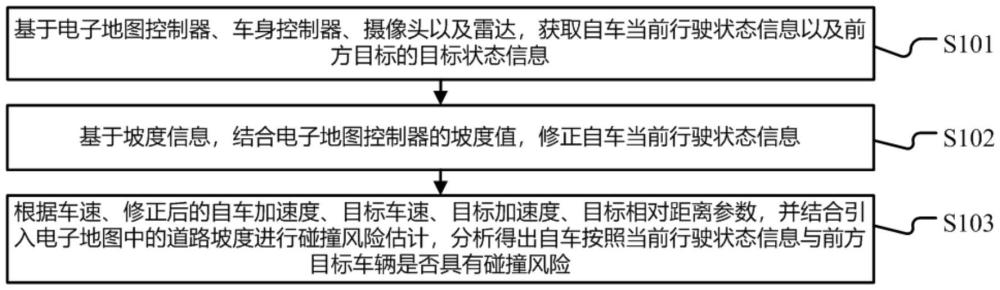
3、s101:基于電子地圖控制器、車身控制器、攝像頭以及雷達,獲取自車當前行駛狀態信息以及前方目標的目標狀態信息;
4、s102:基于坡度信息,結合電子地圖控制器的坡度值,修正自車當前行駛狀態信息;
5、s103:根據車速、修正后的自車加速度、目標車速、目標加速度、目標相對距離參數,并結合引入電子地圖中的道路坡度進行碰撞風險估計,分析得出自車按照當前行駛狀態信息與前方目標車輛是否具有碰撞風險。
6、進一步需要說明的是,方法中,前方目標的目標狀態信息及自車行駛狀態信息包括但不限于前車車速vtv、自車車速vsv、前車加速度atv、自車加速度atv以及相對距離drel。
7、進一步需要說明的是,方法中,電子地圖控制器的坡度輸出為數組形式變量,數組形式變量包括但不限于車輛當前位置的道路坡度及前方道路坡度
8、進一步需要說明的是,方法中的坡度修正方式為:
9、定義三個點作為道路坡度的觀測量,并進行加權計算,
10、
11、其中,k0,k1,k2為修正公式中對各點觀測量的修正權重,為車輛在k點的道路坡度的估計值,為車輛行駛在k,k-1,k-2點時對k點坡度的觀測值。
12、進一步需要說明的是,步驟s102中的修正后碰撞風險計算公式為:
13、
14、公式中,arel=atv-asv+α;
15、vtv為前車車速、vsv為自車車速、atv為前車加速度、atv為自車加速度、drel為相對距離,α為修正系數。
16、進一步需要說明的是,對自車在坡路上的碰撞風險進行修正的動力學公式為:
17、
18、其中,fxf為輪胎縱向力,rxr為滾動阻力,faero為空氣阻力,mgsinθ為車輛重力造成的水平阻力。
19、進一步需要說明的是,方法中,根據坡度值θ的大小選擇修正系數α;
20、當車輛處于上坡路段時,此時坡度值θ大于0,修正系數α大于0;
21、當車輛處于下坡路段時,此時坡度值θ小于0,修正系數α小于0。
22、本申請還提供一種基于電子地圖的商用車碰撞風險估計系統,系統包括:風險評估數據處理模塊、電子地圖控制器、車身控制器、攝像頭以及雷達;
23、基于電子地圖控制器、車身控制器、攝像頭以及雷達,獲取自車當前行駛狀態信息以及前方目標的目標狀態信息;
24、風險評估數據處理模塊基于坡度信息,結合電子地圖控制器的坡度值,修正自車當前行駛狀態信息;
25、還用于根據車速、修正后的自車加速度、目標車速、目標加速度、目標相對距離參數,并結合引入電子地圖中的道路坡度進行碰撞風險估計,分析得出自車按照當前行駛狀態信息與前方目標車輛是否具有碰撞風險。
26、根據本申請的另一個實施例,提供了一種車輛,包括存儲器、整車控制器及存儲在所述存儲器上并可在所述整車控制器上運行的計算機程序,所述整車控制器執行所述程序時實現基于電子地圖的商用車碰撞風險估計方法的步驟。
27、根據本申請的又一個實施例,還提供了一種存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現所述基于電子地圖的商用車碰撞風險估計方法的步驟。
28、從以上技術方案可以看出,本發明具有以下優點:
29、本申請提供的基于電子地圖的商用車碰撞風險估計方法通過結合電子地圖控制器、車身控制器、攝像頭以及雷達的數據,能夠獲取更全面、更準確的自車行駛狀態信息和前方目標狀態信息。可以減少單一數據源可能帶來的誤差,提高碰撞風險評估的準確性。而且利用電子地圖中的坡度信息對自車行駛狀態進行修正,考慮了地形因素對車輛行駛狀態的影響,使得碰撞風險評估更加貼近實際情況。
30、本申請通過將電子地圖中前方的道路坡度等信息引入自動緊急制動系統的碰撞風險估計中,并對自動緊急制動系統的制動決策進行修正,使得重型商用車輛在遇到碰撞風險時可以實現精準制動,大大提高了重型商用車在道路行駛過程中的安全性,增強了重型商用車自動緊急制動系統的魯棒性。
31、本申請的方法通過實時分析自車與前方目標的行駛狀態,一旦評估出存在碰撞風險,系統可以立即發出預警信號,提醒駕駛員采取相應措施,從而有效避免或減少碰撞事故的發生。
技術特征:
1.一種基于電子地圖的商用車碰撞風險估計方法,其特征在于,方法包括:
2.根據權利要求1所述的基于電子地圖的商用車碰撞風險估計方法,其特征在于,方法中,前方目標的目標狀態信息及自車行駛狀態信息包括但不限于前車車速vtv、自車車速vsv、前車加速度atv、自車加速度atv以及相對距離drel。
3.根據權利要求1所述的基于電子地圖的商用車碰撞風險估計方法,其特征在于,方法中,電子地圖控制器的坡度輸出為數組形式變量,數組形式變量包括但不限于車輛當前位置的道路坡度及前方道路坡度
4.根據權利要求1所述的基于電子地圖的商用車碰撞風險估計方法,其特征在于,方法中的坡度修正方式為:
5.根據權利要求1所述的基于電子地圖的商用車碰撞風險估計方法,其特征在于,步驟s102中的修正后碰撞風險計算公式為:
6.根據權利要求5所述的基于電子地圖的商用車碰撞風險估計方法,其特征在于,對自車在坡路上的碰撞風險進行修正的動力學公式為:
7.根據權利要求5所述的基于電子地圖的商用車碰撞風險估計方法,其特征在于,方法中,根據坡度值θ的大小選擇修正系數α;
8.一種基于電子地圖的商用車碰撞風險估計系統,其特征在于,系統用于實現如權利要求1至7任一項所述的基于電子地圖的商用車碰撞風險估計方法;系統包括:風險評估數據處理模塊、電子地圖控制器、車身控制器、攝像頭以及雷達;
9.一種車輛,包括存儲器、整車控制器及存儲在所述存儲器上并可在所述整車控制器上運行的計算機程序,其特征在于,所述整車控制器執行所述程序時實現如權利要求1至7任一項所述基于電子地圖的商用車碰撞風險估計方法的步驟。
10.一種存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現如權利要求1至7任一項所述基于電子地圖的商用車碰撞風險估計方法的步驟。
技術總結
本發明提供一種基于電子地圖的商用車碰撞風險估計方法、系統、車輛及存儲介質,屬于商用車智能駕駛技術領域,基于電子地圖控制器、車身控制器、攝像頭以及雷達,獲取自車當前行駛狀態信息以及前方目標的目標狀態信息;基于坡度信息,結合電子地圖控制器的坡度值,修正自車當前行駛狀態信息;根據車速、修正后的自車加速度、目標車速、目標加速度、目標相對距離參數,并結合引入電子地圖中的道路坡度進行碰撞風險估計,分析得出自車按照當前行駛狀態信息與前方目標車輛是否具有碰撞風險。本發明使得重型商用車輛在遇到碰撞風險時可以實現精準制動,大大提高了重型商用車在道路行駛過程中的安全性。
技術研發人員:劉宇航,田磊,趙玉超,王一鵬,郭聰,趙小龍
受保護的技術使用者:中國重汽集團濟南動力有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!