一種視覺定位的電動汽車自動充電方法
本發明涉及自動充電領域,尤其涉及一種視覺定位的電動汽車自動充電裝置。
背景技術:
1、汽車“新四化”中的“智能化”要求將智能化技術與汽車整合,從而衍生出自動駕駛與智能輔助等技術。當充電樁與智能化技術相結合時,自動充電樁這一產品技術順勢而生。它構建出自動駕駛和自動充電一體化智能汽車生態,推動人工智能與生活的高度融合。通過對國內充電站以及現有充電設備進行調研,發現市面上的充電裝置或充電方式分為固定充電、無線充電、換電、連接式自動充電等。
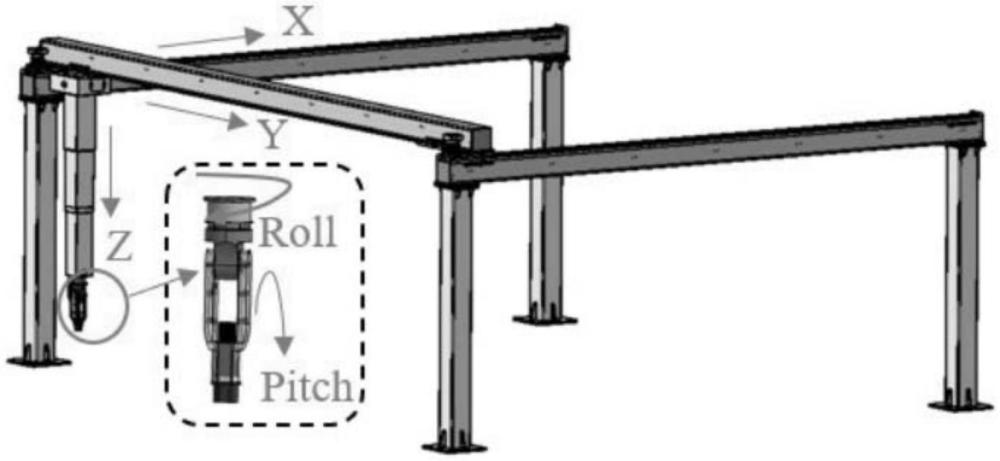
2、其中,現有的自動充電裝置,如圖1所示,包括桁架并搭載可伸縮機械臂,自動充電裝置裝置還包括電動推桿和充電槍關節,桁架與電動推桿的三自由度覆蓋整個停車空間,充電槍關節針對汽車停車的姿態和不同的偏移角度,在自動充電裝置中,桁架提供x和y方向兩個自由度的移動,帶動可伸縮機械臂移動到充電口上方,可伸縮機械臂降落至充電口高度附近,實現z軸方向的移動,桁架與可伸縮機械臂的關節配合可以實現空間任意位置點的運動,充電槍關節由旋轉關節和偏轉關節組裝而成,通過輸出轉角配合,實現與充電口的對接,而上述自動充電裝置在使用時,需要設計一種充電方法,來實現自動獲得充電口的精確位置坐標,從而將充電槍與充電口準確對接,自動實現充電的功能,同時,自動充電裝置的運動軌跡和時間也需要進行優化,基于此,本發明設計了一種視覺定位的電動汽車自動充電裝置。
技術實現思路
1、本發明的目的是解決現有技術中的問題,而提出的一種視覺定位的電動汽車自動充電方法。
2、一種視覺定位的電動汽車自動充電方法,包括:
3、自動充電裝置,所述自動充電裝置包括桁架并搭載可伸縮機械臂,所述自動充電裝置裝置還包括電動推桿和充電槍關節,所述桁架與電動推桿的三自由度覆蓋整個停車空間,所述充電槍關節針對汽車停車的姿態和不同的偏移角度;
4、深度學習充電口的視覺識別方案,包括全局識別定位方案和局部識別定位方案;
5、其中,在全局識別定位方案中,采集不同停車角度和朝向的電動汽車圖片制作數據集,利用yolov4目標檢測算法進行目標識別,選用雙重語義分割算法進行汽車輪廓提取,通過最小外接矩形獲取電動汽車空間位置信息,進而根據車輛信息換算得到充電口的位置信息;
6、在局部識別定位方案中,根據全局識別定位獲取的充電口位置坐標,驅動充電槍關節運動至車輛充電口附近,位于充電槍上方的局部攝像頭開始采集充電口圖片,通過yolov4算法檢測、特征匹配、單應矩陣求解獲取充電口的精確位置,最后,參照精確的充電口位置信息實現充電槍與充電口的對接。
7、在上述視覺定位的電動汽車自動充電系統中,目標識別的具體步驟如下:
8、s1借助雙向語義分割算法對車輛外形輪廓進行提取,通過最小外接矩形獲取電動汽車的中心世界坐標;
9、s2:通過上述位置信息為充電機械臂的移動提供位置導向,充電機械手臂運動至充電口附近區域,此時開始進行局部識別定位流程;
10、s3:位于充電機械臂末端的局部攝像頭開始采集充電口圖片,采用改進spp模塊的yolov4模型對充電口進行檢測,roi算法對充電接口進行提取,借助特征點匹配實現不同型號充電接口的匹配與定位;
11、s4:基于單應矩陣求解充電口的精確位置。
12、在上述視覺定位的電動汽車自動充電系統中,根據視覺定位獲取的充電口位置坐標和自動充電裝置的充電槍的初始位置坐標規劃運動軌跡,并選用3-5-3混合多項式插值進行軌跡規劃。
13、在上述視覺定位的電動汽車自動充電系統中,采用改進粒子群算法對規劃的軌跡進行時間優化,改善充電運動時間。
14、在上述視覺定位的電動汽車自動充電系統中,改進粒子群算法優化流程步驟包括:
15、步驟1:首先確定粒子的規模,粒子迭代優化的次數以及粒子初始位置和速度;
16、步驟2:根據原始的路徑表達式求解速度與加速度;
17、步驟3:查看是否滿足運動學約束條件,如滿足計算該粒子的適應度數值。
18、步驟4:迭代更新粒子的位置與速度;
19、步驟5:獲取最優粒子,進而獲得群體的最優粒子;
20、步驟6:判斷是否滿足結果要求,如果滿足,輸出最優結果。
21、在上述視覺定位的電動汽車自動充電系統中,在所述自動充電裝置中,所述桁架提供x和y方向兩個自由度的移動,帶動所述可伸縮機械臂移動到充電口上方,所述可伸縮機械臂降落至充電口高度附近,實現z軸方向的移動,所述桁架與可伸縮機械臂的關節配合可以實現空間任意位置點的運動,所述充電槍關節由旋轉關節和偏轉關節組裝而成,通過輸出轉角配合,實現與充電口的對接。
22、與現有的技術相比,本發明優點在于:
23、1.摒棄了當前自動充電設備占用停車位空間,服務車輛數目少的缺點,可實現多車位不同方位的充電對接,采用yolov4目標檢測算法識別定位充電口,獲取充電口的空間位置,以桁架為基礎的自動充電裝置運動至充電口附近實現充電對接,完成充電活動,克服了當前充電裝置多為手動裝置的缺點,還可以針對不同車型充電口的布置位置進行充電,極大改善了當前自動充電裝置種類少,占地空間大的現狀。
24、2.根據視覺定位獲取的充電口位置坐標和自動充電裝置的充電槍頭的初始位置坐標規劃運動軌跡,選用3-5-3混合多項式插值進行軌跡規劃,規劃后的運動曲線光滑平順,不會產生振動沖擊。。
25、3.無障礙物路徑規劃的基礎上進行充電軌跡時間優化研究,改進粒子群算法的學習因子,提高收斂性。采用改進后的粒子群算法對規劃的軌跡進行時間優化,改善充電運動時間。
技術特征:
1.一種視覺定位的電動汽車自動充電方法,其特征在于,包括:
2.根據權利要求1所述的一種視覺定位的電動汽車自動充電方法,其特征在于:目標識別的具體步驟如下:
3.根據權利要求1所述的一種視覺定位的電動汽車自動充電方法,其特征在于:所述規劃自動充電裝置的運動軌跡選用3-5-3混合多項式插值進行軌跡規劃。
4.根據權利要求1所述的一種視覺定位的電動汽車自動充電方法,其特征在于:所述時間優化采用改進粒子群算法,改善充電運動時間。
5.根據權利要求4所述的一種視覺定位的電動汽車自動充電方法,其特征在于:改進粒子群算法優化流程步驟包括:
技術總結
本發明公開了一種視覺定位的電動汽車自動充電方法,涉及自動充電領域,包括以自動桁架為基礎的自動充電裝置,并搭載可伸縮機械臂,自動充電裝置裝置還包括電動推桿、旋轉關節、偏轉關節和充電槍,自動桁架與電動推桿的三自由度覆蓋整個停車空間,旋轉關節與偏轉關節針對汽車停車的姿態和不同的偏移角度,同時公開了深度學習充電口的視覺識別方案,包括全局識別定位方案和局部識別定位方案;本發明的優點是,用3?5?3混合多項式插值規劃充電路徑,規劃后的運動曲線光滑平順,不會產生振動沖擊,在無障礙物路徑規劃的基礎上進行充電軌跡時間優化研究,采用改進粒子群算法提高算法的收斂性,進而優化充電時間。
技術研發人員:史春飛
受保護的技術使用者:安徽信息工程學院
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!