一種車輛短期軌跡預測方法、系統、設備和介質與流程
本發明屬于輔助駕駛,涉及一種車輛短期軌跡預測方法、系統、設備和介質。
背景技術:
1、在現有的車輛短期軌跡預測技術中,多數系統依賴于靜態參數設定,如固定的轉向曲率和橫擺角速度,來估計車輛的未來位置且每個周期使用自車中心作為原點進行軌跡預測。這種方法在處理變速或復雜道路條件時往往缺乏靈活性和準確性。尤其是在低速和高速條件下,車輛的動態響應差異顯著,靜態模型難以有效適應這些變化,導致預測精度不足。此外,傳統算法通常不考慮軌跡的最大彎曲限制,這可能導致預測軌跡在物理上不可行或安全風險增加,特別是在緊急避障或復雜交通場景中,具體如下:
2、現有的車輛短期軌跡預測技術速度適應性不足:現有的短期軌跡預測系統通常使用靜態模型,在不同速度下表現不一致。在低速時,橫擺角速度主要受轉向系統影響,而中高速時,車輛行為可能受側滑和空氣動力學效應影響,導致在側滑或在速度變化大等工況時預測準確性降低。
3、現有的車輛短期軌跡預測技術坐標系統轉換處理不足:軌跡預測準確性高度依賴于從局部坐標系到全局坐標系的精確轉換。這意味著計算的軌跡能夠反映車輛在整個行駛環境中的實際運動路徑,而非僅限于局部視角,現有短期軌跡預測通常采用簡化模型,每個周期以車輛為中心進行預測,軌跡非連續,結果導致預測軌跡不精確。
4、現有的車輛短期軌跡預測技術存在橫擺角限制保護:當傳感器出現故障,現有技術在處理異常大的橫擺角速度信息時可能會錯誤地預測軌跡,造成嚴重后果。
5、綜上所述,本發明現有的車輛短期軌跡預測技術在側滑或在速度變化大等工況時預測準確性降低,預測軌跡不精確,在處理異常大的橫擺角速度信息時可能會錯誤地預測軌跡。
技術實現思路
1、為了克服上述現有技術的缺點,本發明的目的在于提供一種車輛短期軌跡預測方法、系統、設備和介質,本發明能夠實現車輛短期軌跡的預測,提高了軌跡預測的準確性。
2、為了達到上述目的,本發明采用以下技術方案予以實現:
3、第一方面,本發明提供一種車輛短期軌跡預測方法,包括以下步驟:
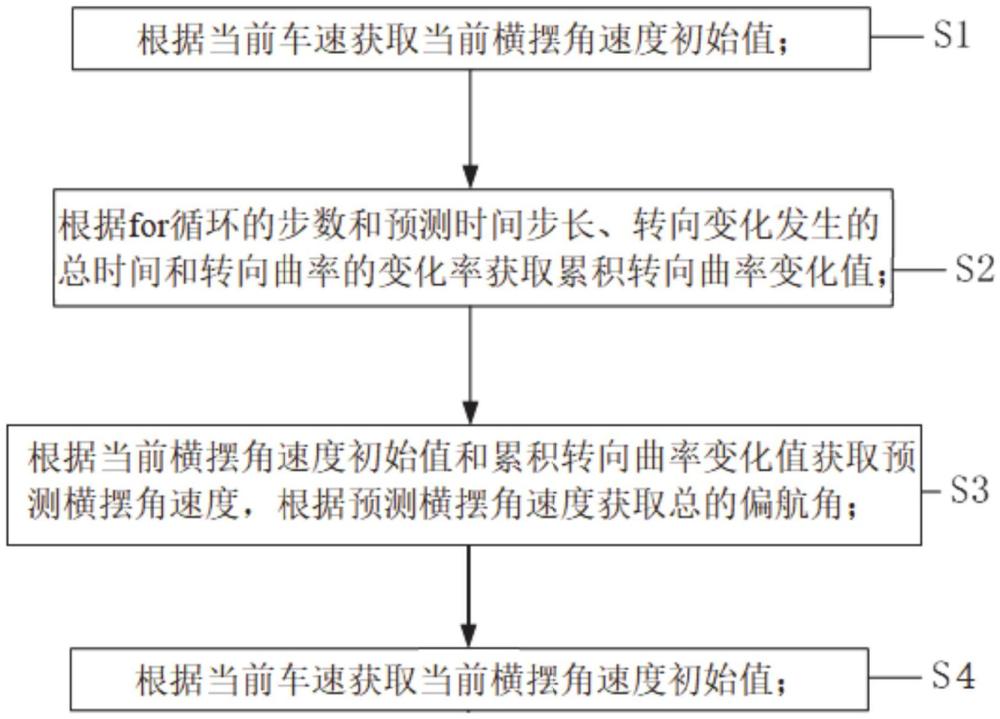
4、根據當前車速獲取初始橫擺角速度;
5、根據for循環的步數、預測時間步長、轉向變化發生的總時間和轉向曲率的變化率獲取累積轉向曲率變化值;
6、根據初始橫擺角速度和累積轉向曲率變化值獲取預測橫擺角速度,根據預測橫擺角速度獲取總的偏航角;
7、根據總的偏航角和當前位置坐標預測短期軌跡的坐標。
8、第二方面,本發明提供一種車輛短期軌跡預測系統,包括:
9、初始橫擺角獲取模塊:用于根據當前車速獲取初始橫擺角速度;
10、曲率變化值獲取模塊:用于根據for循環的步數、預測時間步長、轉向變化發生的總時間和轉向曲率的變化率獲取累積轉向曲率變化值;
11、偏航角獲取模塊:用于根據初始橫擺角速度和累積轉向曲率變化值獲取預測橫擺角速度,根據預測橫擺角速度獲取總的偏航角;
12、軌跡坐標獲取模塊:用于根據總的偏航角和當前位置坐標預測短期軌跡的坐標。
13、第三方面,本發明提供一種電子設備,包括:處理器;存儲器,電子設備用于存儲計算機程序指令;用于執行所述計算機程序時實現車輛短期軌跡預測方法的步驟。
14、第四方面,本發明提供一種存儲介質,所述存儲介質存儲有計算機程序指令,所述計算機程序指令被處理器加載并運行時,所述處理器執行車輛短期軌跡預測方法。
15、與現有技術相比,本發明具有以下有益效果:
16、1、本發明方法根據當前車速獲取初始橫擺角速度,引入橫擺角速度初始值有利于提高本發明在中高速時的軌跡預測的準確性;根據for循環的步數、預測時間步長、轉向變化發生的總時間和轉向曲率的變化率獲取累積轉向曲率變化值,有利于提高低速時的軌跡預測的準確性;根據初始橫擺角速度和累積轉向曲率變化值獲取預測橫擺角速度,根據預測橫擺角速度獲取總的偏航角,在中速區域,通過綜合橫擺角速度和轉向曲率預測軌跡,有利于提高中速時的軌跡預測的準確性;根據總的偏航角和當前位置坐標預測短期軌跡的坐標。本發明綜合橫擺角速度和轉向曲率預測軌跡,能夠實現車輛短期軌跡的預測,提高了軌跡預測的準確性。
17、2、本發明能夠根據車輛當前速度動態選擇橫擺角速度的計算模式。即當前車速小于插值開始的速度,則使用轉向曲率和當前車速獲取初始的橫擺角速度;當前車速大于插值開始的速度且小于插值結束的速度,則使用當前車速、插值開始的速度、插值結束的速度和轉向曲率獲取初始的橫擺角速度;當前車速大于插值結束的速度,則使用實測的偏航率獲取初始的橫擺角速度。在低速區域,主要基于轉向曲率來計算橫擺角速度從而計算短期預測軌跡;在高速區域,則直接采用測量的橫擺角速度來計算短期預測軌跡;中速時則通過轉向曲率計算和傳感器測量的橫擺角速度兩者的加權插值得到預測橫擺角速度。這種自適應的橫擺角速度融合策略能夠根據不同的駕駛速度,提供最合適的橫擺角信息,從而優化預測的軌跡準確度。
18、3、本發明軌跡局部與全局坐標轉換:通過極坐標系統描述車輛的局部移動軌跡,通過在預測時間內對局部軌跡進行拼接,并將其轉換成全局笛卡爾坐標系下的軌跡。該算法可以確保短期的軌跡規劃是連續的,不是分離的,提高模型預測的準確性,減少了由于坐標轉換和非線性動態行為所導致的誤差累積以及軌跡非連續的問題,使預測結果更加穩定可靠。
19、4、本發明具有動態適應性:本發明通過結合車輛的速度條件,動態地調整橫擺角速度預測算法,確保在不同速度下都能獲得準確的軌跡預測。這種適應性使得算法在面對變速行駛的車輛時更為準確,從而提高了軌跡預測的可靠性和精確性。
20、5、本發明能夠增強了行駛的安全性:若總的偏航角與初始方向的差的絕對值大于等于最大彎曲偏航角,則使該時間步長對應的橫擺角速度變化量歸零,通過限制軌跡的最大橫擺角,能夠避免生成過度曲折的軌跡,減少變道或急轉彎帶來的碰撞風險,能夠排除不切實際的軌跡,導致錯誤的預測。這一控制機制能夠提高車輛行駛的穩定性和安全性,尤其是在緊急避障或快速變道場景中。
21、6、本發明系統包括初始橫擺角獲取模塊、曲率變化值獲取模塊、偏航角獲取模塊和軌跡坐標獲取模塊,初始橫擺角獲取模塊用于根據當前車速獲取初始橫擺角速度;曲率變化值獲取模塊用于根據for循環的步數、預測時間步長、轉向變化發生的總時間和轉向曲率的變化率獲取累積轉向曲率變化值;偏航角獲取模塊:用于根據初始橫擺角速度和累積轉向曲率變化值獲取預測橫擺角速度,根據預測橫擺角速度獲取總的偏航角;軌跡坐標獲取模塊:用于根據總的偏航角和當前位置坐標預測短期軌跡的坐標。本發明系統各個模塊相互配合,能夠實現車輛短期軌跡的預測,提高了軌跡預測的準確性。
技術特征:
1.一種車輛短期軌跡預測方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的一種車輛短期軌跡預測方法,其特征在于,所述根據當前車速獲取初始橫擺角速度的方法具體如下:
3.根據權利要求1所述的一種車輛短期軌跡預測方法,其特征在于,所述根據for循環的步數、預測時間步長、轉向變化發生的總時間和轉向曲率的變化率獲取累積轉向曲率變化值的方法具體如下:
4.根據權利要求1所述的一種車輛短期軌跡預測方法,其特征在于,所述根據初始橫擺角速度和累積轉向曲率變化值獲取預測橫擺角速度的公式如下:
5.根據權利要求1所述的一種車輛短期軌跡預測方法,其特征在于,所述根據預測橫擺角速度獲取總的偏航角的方法具體如下:
6.根據權利要求1所述的一種車輛短期軌跡預測方法,其特征在于,所述根據總的偏航角和當前位置坐標預測短期軌跡的坐標的方法具體如下:
7.根據權利要求6所述的一種車輛短期軌跡預測方法,其特征在于,所述根據總的偏航角、當前步的速度、預測時間步長和當前位置坐標預測短期軌跡的坐標的方法具體如下:
8.一種用于實現權利要求1至7任一所述方法的車輛短期軌跡預測系統,其特征在于,包括:
9.一種電子設備,包括:處理器;存儲器,電子設備用于存儲計算機程序指令;其特征在于,用于執行所述計算機程序時實現如權利要求1-7任一項所述的車輛短期軌跡預測方法的步驟。
10.一種存儲介質,所述存儲介質存儲有計算機程序指令,其特征在于,所述計算機程序指令被處理器加載并運行時,所述處理器執行權利要求1-7任一項所述的車輛短期軌跡預測方法。
技術總結
本發明屬于輔助駕駛技術領域,涉及一種車輛短期軌跡預測方法、系統、設備和介質。本發明根據當前車速獲取初始橫擺角速度,引入橫擺角速度初始值有利于提高本發明在中高速時的軌跡預測的準確性;根據for循環的步數和預測時間步長、轉向變化發生的總時間和轉向曲率的變化率獲取累積轉向曲率變化值,有利于提高低速時的軌跡預測的準確性;根據初始橫擺角速度和累積轉向曲率變化值獲取預測橫擺角速度,有利于提高中速時的軌跡預測的準確性;根據總的偏航角和當前位置坐標預測短期軌跡的坐標。本發明綜合橫擺角速度和轉向曲率預測軌跡,能夠實現車輛短期軌跡的預測,提高了軌跡預測的準確性。
技術研發人員:孫揚,張啟亮,劉慶,方明,余浩哲
受保護的技術使用者:上海世科嘉車輛技術研發有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!