循環平行停車輔助系統中的駕駛員的制作方法
本公開總體上涉及車輛中的平行停車駕駛員輔助系統,并且更具體地涉及用于針對未配備有環境檢測系統的車輛向駕駛員提供用于平行停車輔助的指示符的方法和裝置。
背景技術:
1、對于許多駕駛員來說,平行停車仍然是駕駛的最具挑戰性的方面之一。無法判斷與路緣和其他車輛的距離,以及試圖將車輛的乘客側與路緣和其他停放的車輛(其可能在駕駛員的視野之外)對齊,可能使得駕駛員難以知道如何確定其車輛的角度和定位。除此之外,當附近有許多其他交通、行人和一般觀察者時駕駛員經常經歷的焦慮以及當試圖執行困難的操縱時經歷的一般焦慮導致許多駕駛員避免一起平行停車。
2、許多新車輛包括用于自動平行停車的傳感器和算法。這些附加的傳感器和所需的計算資源給車輛增加了附加成本,這可能使這些特征超出年輕或低收入駕駛員的能力范圍。另外,由于路緣結構的較大變化和劣化狀態,當使用自動平行停車系統時,眾所周知難以準確地檢測路緣,從而頻繁地使這些系統不起作用。期望克服上述問題,以便在未配備有大量傳感器和/或計算系統的車輛中向駕駛員提供平行停車輔助。此外,結合附圖和前述技術領域和背景技術,根據后續詳細描述和所附權利要求,本發明的其他期望特征和特性將變得顯而易見。
技術實現思路
1、一種車輛駕駛員平行停車輔助系統。該系統可操作為計算車輛運動路徑以及生成用戶提示以輔助駕駛員執行平行停車操作。
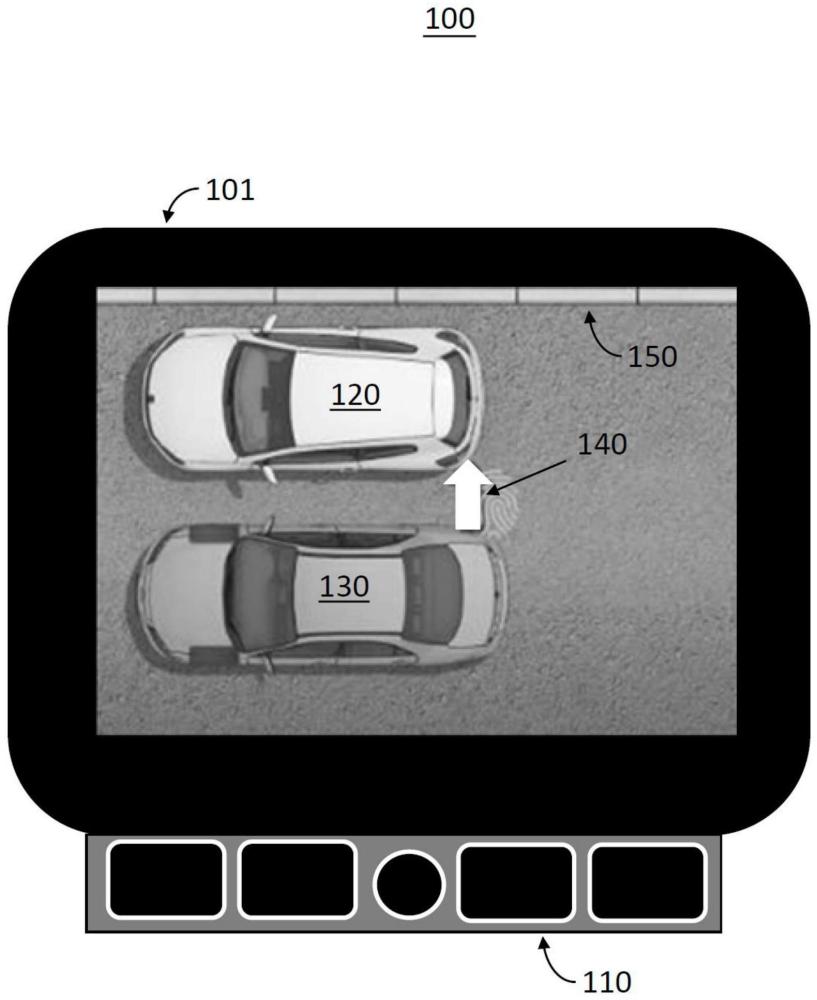
2、根據本公開的方面,一種裝置包括:多個相機,用于捕獲多個視頻流;圖像處理器,用于響應于多個視頻流來生成俯視圖視頻流;處理器,被配置用于執行停車輔助算法,包括:生成包括俯視圖視頻流、主車輛的圖形表示和用于指示主車輛的初始定位的第一箭頭的增強視頻流,用于響應于從用戶接口接收到指示對主車輛的初始定位的確認的第一確認信號而生成指示第一轉向角的第一控制信號,用于響應于偏航的改變達到第一期望偏航而生成指示第二轉向角的第二控制信號,生成要覆蓋在俯視圖視頻流上的指示主車輛與路緣之間的距離的第二箭頭,響應于從用戶接口接收到指示對主車輛與路緣之間的距離的確認的第二確認信號而生成指示第三轉向角的第三控制信號,以及響應于偏航的改變達到第二期望偏航而提供指示停車輔助算法完成的用戶反饋。
3、根據本公開的另一方面,其中偏航的改變是對照在主車輛的初始定位處建立的初始主車輛偏航來確定的。
4、根據本公開的另一方面,其中第二期望偏航是零度。
5、根據本公開的另一方面,其中第一期望偏航是45度。
6、根據本公開的另一方面,還包括轉向控制器,用于響應于第一控制信號、第二控制信號和第三控制信號來調整主車輛轉向機構的轉向角。
7、根據本公開的另一方面,其中第一確認信號是響應于主車輛駕駛員在顯示第一箭頭的點處按下觸敏顯示器而生成的。
8、根據本公開的另一方面,其中第一箭頭的尖端與在增強視頻流上示出的前方已停放車輛的左后角對齊。
9、根據本公開的另一方面,其中處理器還可操作用于生成油門控制信號,用于在停車輔助算法期間控制主車輛的倒車。
10、根據本公開的另一方面,還被配置用于響應于接收到指示主車輛制動踏板被壓下的制動指示符而暫停停車輔助算法。
11、根據本公開的另一方面,一種用于執行停車輔助算法的方法包括:由圖像處理器生成包括俯視圖視頻流、主車輛的圖形表示和用于指示主車輛的初始定位的第一箭頭的增強視頻流,由處理器響應于從用戶接口接收到指示對主車輛的初始定位的確認的第一確認信號而生成指示第一轉向角的第一控制信號,由處理器響應于偏航的改變達到第一期望偏航而生成指示第二轉向角的第二控制信號,由處理器生成要覆蓋在俯視圖視頻流上的指示主車輛與路緣之間的距離的第二箭頭,由處理器響應于從用戶接口接收到指示對主車輛與路緣之間的距離的確認的第二確認信號而生成指示第三轉向角的第三控制信號,以及由處理器響應于偏航的改變達到第二期望偏航而提供指示停車輔助算法完成的用戶反饋。
12、根據本公開的另一方面,其中俯視圖視頻流是響應于從具有重疊視場的多個車輛相機接收的多個視頻流的編譯來生成的。
13、根據本公開的另一方面,還包括響應于第一控制信號、第二控制信號和第三控制信號來控制用于調整主車輛轉向角的轉向控制器。
14、根據本公開的另一方面,其中第二期望偏航等于在主車輛的初始定位處確定的初始偏航。
15、根據本公開的另一方面,其中處理器還被配置用于生成油門控制信號,用于在停車輔助算法的執行期間控制主車輛的倒車操縱。
16、根據本公開的另一方面,其中處理器還被配置用于響應于接收到指示主車輛制動踏板被壓下的制動指示符而暫停停車輔助算法。
17、根據本公開的另一方面,其中第一確認信號是響應于主車輛駕駛員在顯示第一箭頭的點處按下觸敏顯示器而生成的。
18、根據本公開的另一方面,其中第二確認信號是響應于主車輛駕駛員在顯示第二箭頭的位置處按下觸敏顯示器而生成的。
19、根據本公開的另一方面,其中處理器還被配置用于響應于第一控制信號、第二控制信號和第三控制信號而生成指示轉向角的用戶轉向提示。
20、根據本公開的另一方面,一種車輛控制系統包括:車輛相機系統,用于生成主車輛環境的俯視圖視頻;圖像處理器,用于生成包括俯視圖視頻、主車輛的圖形表示、第一箭頭和第二箭頭的增強圖像;顯示器,用于顯示增強圖像;用戶輸入端,用于響應于第一用戶輸入生成第一用戶確認信號以及響應于第二用戶輸入生成第二用戶確認信號;處理器,用于將顯示指示主車輛的初始定位的第一箭頭的請求耦合到圖像處理器,響應于從用戶接口接收到指示對主車輛的初始定位的確認的第一確認信號而生成指示第一轉向角的第一控制信號,由處理器響應于偏航的改變達到第一期望偏航而生成指示第二轉向角的第二控制信號,將顯示指示主車輛與路緣之間的距離的第二箭頭的請求耦合到圖像處理器,由處理器響應于從用戶接口接收到指示對主車輛與路緣之間的距離的確認的第二確認信號而生成指示第三轉向角的第三控制信號,以及由處理器響應于偏航的改變達到第二期望偏航而提供指示停車輔助算法完成的用戶反饋。
21、根據本公開的另一方面,其中,用戶反饋被覆蓋在顯示器上顯示的俯視圖視頻上。
技術特征:
1.一種裝置,包括:
2.根據權利要求1所述的裝置,其中所述偏航的改變是對照在所述主車輛的所述初始定位處建立的初始主車輛偏航來確定的。
3.根據權利要求1所述的裝置,其中所述第二期望偏航是零度。
4.根據權利要求1所述的裝置,其中所述第一期望偏航是45度。
5.根據權利要求1所述的裝置,還包括轉向控制器,用于響應于所述第一控制信號、所述第二控制信號和所述第三控制信號來調整主車輛轉向機構的轉向角。
6.根據權利要求1所述的裝置,其中所述第一確認信號是響應于主車輛駕駛員在顯示所述第一箭頭的點處按下觸敏顯示器而生成的。
7.根據權利要求1所述的裝置,其中所述第一箭頭的尖端與在所述增強視頻流上示出的前方已停放車輛的左后角對齊。
8.根據權利要求1所述的裝置,其中所述處理器還可操作用于生成油門控制信號,用于在所述停車輔助算法期間控制所述主車輛的倒車。
9.根據權利要求1所述的裝置,還被配置用于響應于接收到指示主車輛制動踏板被壓下的制動指示符而暫停所述停車輔助算法。
10.一種用于執行停車輔助算法的方法包括:
技術總結
用于提供平行停車輔助的方法包括:生成包括俯視圖視頻流、主車輛的圖形表示和用于指示主車輛的初始定位的第一箭頭的增強視頻流,由處理器響應于從用戶接口接收到指示對主車輛的初始定位的確認的第一確認信號而生成指示第一轉向角的第一控制信號,由處理器響應于偏航的改變達到第一期望偏航而生成指示第二轉向角的第二控制信號,由處理器生成要覆蓋在俯視圖視頻流上的指示主車輛與路緣之間的距離的第二箭頭,由處理器響應于從用戶接口接收到指示對主車輛與路緣之間的距離的確認的第二確認信號而生成指示第三轉向角的第三控制信號。
技術研發人員:M·M·帕基拉,A·古達齊,N·J·維格特,M·J·比利斯
受保護的技術使用者:通用汽車環球科技運作有限責任公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!