一種車輛電子穩定系統冗余控制方法及系統、汽車與流程
本發明涉及汽車輔助控制領域,特別涉及一種車輛電子穩定系統冗余控制方法及系統、汽車。
背景技術:
1、汽車電子穩定控制系統(electronic?stability?controller,esc)能夠降低事故發生率、保證駕駛員安全,目前上市的車輛都強制裝配esc。esc穩定工作可以保證車輛的失控下的安全。電子穩定控制系統的基礎輸入數據是基于車載慣量傳感器采集的信號,基于該信號可以實現對于車輛的穩定性控制的接入;如專利申請號為201710998912.6的基于主動干預轉向系統的車輛穩定性控制系統,其公開了通過車身慣量傳感器輸入的車輛實際加速度和橫擺角速度信號判斷車輛的行駛狀態,進而控制車輛的狀態,使得車輛保持穩定,避免發生側滑等行車不穩定的情況。
2、由此可見esc的功能運行的前提是慣量傳感器的信號,若慣性測量單元(inertialmeasurement?unit,imu)失效則無法通過慣量傳感器獲取對應的信號,造成esc功能就會失效,無法繼續保護整車安全。這種情況下,車輛失控時esc無法介入,將會造成人員傷亡、車輛損壞,甚至對正常行駛的車輛、行人造成潛在的安全隱患。
3、現有技術常用的做法是采用兩套榮譽的esc來實現,但是兩套ecs就會造成成本的增加,因此如何在保證安全和成本的前提下實現esc的冗余控制十分重要,目前現有技術無相關技術公開。
技術實現思路
1、本發明的目的在于克服現有技術的不足,提供一種車輛電子穩定系統冗余控制方法及系統、汽車,通過車載器件獲取esc工作所需信號,在慣量傳感器故障時可以采用車載器件獲取的信號進行接入控制。
2、為了實現上述目的,本發明采用的技術方案為:一種車輛電子穩定系統冗余控制方法,包括正常控制模式和冗余控制模式;正常控制模式下,esc通過慣量傳感器獲取車輛狀態信號并執行介入策略;在冗余控制模式下,esc通過車載gps采集的信號經計算后得到車輛狀態信號并執行介入策略。
3、esc默認采用正常控制模塊并在慣量傳感器失效時采用冗余控制模式進行電子穩定控制。
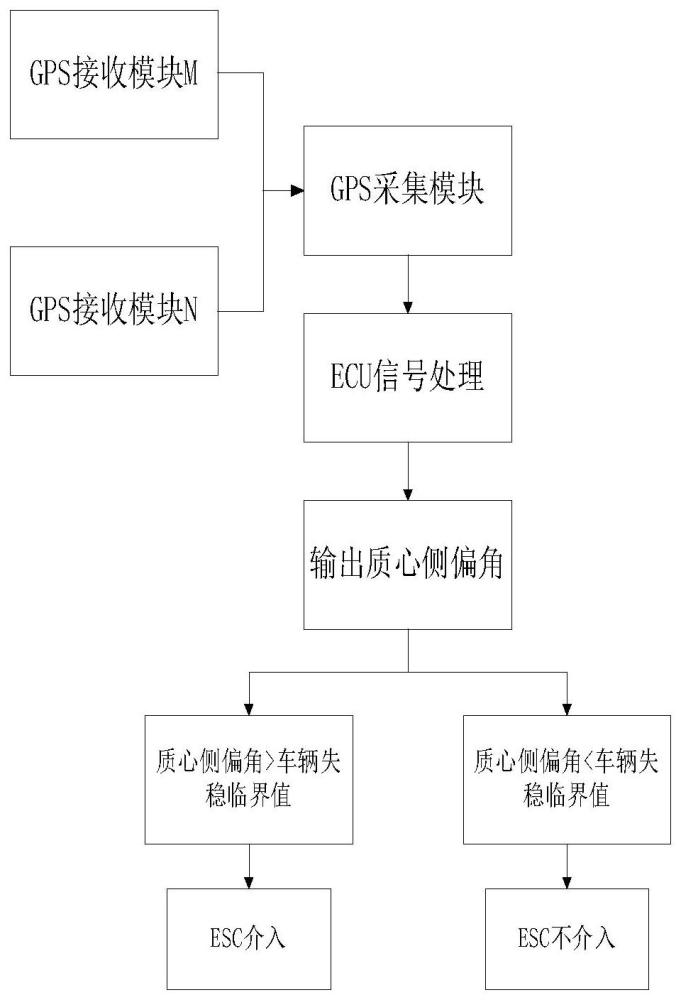
4、在冗余控制模式下,實時通過gps信號建模計算汽車的質心側偏角和橫擺角速度;基于計算的質心側偏角和橫擺角速度計算出前后輪側偏角;然后基于前后輪側偏角計算出汽車的穩定性系數;通過對比穩定性系數來控制確定esc介入策略并由esc執行。
5、實時通過gps信號建模計算汽車的質心側偏角和橫擺角速度包括:
6、建立汽車的xoy平面直角坐標系;在汽車上預先設置兩個gps接收模塊a、b;且gps接收模塊a、b所在位置的連線與車輛中軸線平行;
7、獲取a點速度方向va、b點速度方向vb;由gps接收模塊a獲取va沿y軸方向的夾角αa、由gps接收模塊b獲取vb沿著y軸方向的夾角αb;
8、計算向量ab與y軸方向在i時刻的橫擺角:
9、θi=90°-arctan(△y/△x);
10、其中:向量ab是指由gps接收模塊a的安裝點到gps接收模塊b的安裝點形成的向量;△y為a點到b點距離沿y軸的分量;△x為a點到b點距離沿x軸的分量;
11、計算在θi時刻的橫擺角速度
12、前質心側偏角采用如下公式計算:
13、βa=θ-αa
14、后質心側偏角采用如下公式計算:
15、βb=0-αb。
16、計算出前后輪側偏角包括:
17、由質心側偏角計算汽車前輪側偏角αf;
18、
19、其中δ為前輪轉角,βa為計算的質心側偏角,lf為質心到前軸距離,ωi為計算的橫擺角速度,xv為車輛行駛速度;
20、由質心側偏角計算汽車后輪側偏角αr;
21、
22、βb為計算的質心側偏角,lr為質心到后軸距離,ωi為計算的橫擺角速度,xv為車輛行駛速度。
23、基于前后輪側偏角計算出汽車的穩定性系數k,其計算公式為:其中αf為汽車前輪側偏角、αr為汽車后輪側偏角;l為車輛軸距(不同車型為定值),ay為整車側向加速度絕對值。
24、通過對比穩定性系數來控制確定esc介入策略包括:
25、當k>a時,esc介入不足轉向控制;其中a為esc判斷整車為不足轉向的門檻值;
26、當k<b時,esc介入過度轉向控制;b為esc判斷整車為過度轉向的門檻值;
27、當a≤k≤b,esc不介入控制。
28、一種車輛電子穩定系統的冗余控制系統,包括慣量傳感器、esc,慣性測量單元通過慣量傳感器將采集的信號發送至esc,所述esc根據慣量傳感器信號進行介入控制;所述冗余控制系統還包括ecu,所述ecu基于gps采集的信號經計算后得到車輛狀態信號并送入到esc中;所述esc在慣量傳感器信號失效后采用基于gps采集的信號經計算后得到車輛狀態信號介入車輛穩定控制。
29、所述gps接收模塊a、b所在位置的連線與車輛中軸線平行;gps接收模塊a、b均連接至ecu;所述ecu通過can網絡獲取車輛的速度和方向盤轉角信號;所述ecu實時通過gps信號建模計算汽車的質心側偏角和橫擺角速度;基于計算的質心側偏角和橫擺角速度計算出前后輪側偏角;然后基于前后輪側偏角計算出汽車的穩定性系數;通過對比穩定性系數來控制確定esc介入策略并由esc執行。
30、一種汽車,所述汽車采用所述的車輛電子穩定系統冗余控制方法進行車輛穩定控制;或者所述汽車包括所述的車輛電子穩定系統的冗余控制系統。
31、本發明的優點在于:提供電子穩定系統的冗余控制,在sec的慣量傳感器損壞或失效后,可以通過車載部件通過計算的方式獲取esc工作所需的信號,從而保證了電子穩定系統的冗余可靠運行,避免因為慣量傳感器失效后esc無法工作帶來的車輛安全隱患;冗余控制方案新增硬件成本低,主要是軟件成本,將控制方法以程序方式植入ecu中即可運行,成本低,可以做到esc正常運行方式的備用冗余方案,滿足可靠性和成本性兼顧的要求。
技術特征:
1.一種車輛電子穩定系統冗余控制方法,其特征在于:包括正常控制模式和冗余控制模式;正常控制模式下,esc通過慣量傳感器獲取車輛狀態信號并執行介入策略;在冗余控制模式下,esc通過車載gps采集的信號經計算后得到車輛狀態信號并執行介入策略。
2.如權利要求1所述的一種車輛電子穩定系統冗余控制方法,其特征在于:esc默認采用正常控制模塊并在慣量傳感器失效時采用冗余控制模式進行電子穩定控制。
3.如權利要求1所述的一種車輛電子穩定系統冗余控制方法,其特征在于:在冗余控制模式下,實時通過gps信號建模計算汽車的質心側偏角和橫擺角速度;基于計算的質心側偏角和橫擺角速度計算出前后輪側偏角;然后基于前后輪側偏角計算出汽車的穩定性系數;通過對比穩定性系數來控制確定esc介入策略并由esc執行。
4.如權利要求3所述的一種車輛電子穩定系統冗余控制方法,其特征在于:
5.如權利要求1-4任一所述的一種車輛電子穩定系統冗余控制方法,其特征在于:
6.如權利要求1-4任一所述的一種車輛電子穩定系統冗余控制方法,其特征在于:
7.如權利要求1-4任一所述的一種車輛電子穩定系統冗余控制方法,其特征在于:
8.一種車輛電子穩定系統的冗余控制系統,包括慣量傳感器、esc,慣性測量單元通過慣量傳感器將采集的信號發送至esc,所述esc根據慣量傳感器信號進行介入控制;其特征在于:所述冗余控制系統還包括ecu,所述ecu基于gps采集的信號經計算后得到車輛狀態信號并送入到esc中;所述esc在慣量傳感器信號失效后采用基于gps采集的信號經計算后得到車輛狀態信號介入車輛穩定控制。
9.如權利要求8所述的車輛電子穩定系統的冗余控制系統,其特征在于:所述gps接收模塊a、b所在位置的連線與車輛中軸線平行;gps接收模塊a、b均連接至ecu;所述ecu通過can網絡獲取車輛的速度和方向盤轉角信號;所述ecu實時通過gps信號建模計算汽車的質心側偏角和橫擺角速度;基于計算的質心側偏角和橫擺角速度計算出前后輪側偏角;然后基于前后輪側偏角計算出汽車的穩定性系數;通過對比穩定性系數來控制確定esc介入策略并由esc執行。
10.一種汽車,其特征在于:所述汽車采用如權利要求1-7任一所述的車輛電子穩定系統冗余控制方法進行車輛穩定控制;或者所述汽車包括如權利要求8或9所述的車輛電子穩定系統的冗余控制系統。
技術總結
本發明公開了一種車輛電子穩定系統冗余控制方法及系統、汽車,包括正常控制模式和冗余控制模式;正常控制模式下,ESC通過慣量傳感器獲取車輛狀態信號并執行介入策略;在冗余控制模式下,ESC通過車載GPS采集的信號經計算后得到車輛狀態信號并執行介入策略。本發明的優點在于:提供電子穩定系統的冗余控制,在ESC的慣量傳感器損壞或失效后,可以通過車載部件通過計算的方式獲取ESC工作所需的信號,從而保證了電子穩定系統的冗余可靠運行,避免因為慣量傳感器失效后ESC無法工作帶來的車輛安全隱患;冗余控制方案新增硬件成本低,主要是軟件成本,將控制方法以程序方式植入ECU中即可運行。
技術研發人員:張平平,潘金鵬,王創
受保護的技術使用者:蕪湖伯特利電子控制系統有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!