車輛能量回收控制方法、裝置、車輛及介質與流程
本發明涉及汽車,尤其涉及一種車輛能量回收控制方法、裝置、車輛及介質。
背景技術:
1、隨著科技的不斷發展,當今新能源汽車發展迅速。其中,大多數新能源汽車都裝配有自適應巡航系統。自適應巡航系統是一種車輛智能駕駛輔助系統。它利用雷達、攝像頭等傳感器檢測前方道路情況和車輛周圍環境信息,通過車輛的車速和前方車輛的距離來自動調節車速和剎車,保持車輛在安全距離內跟隨前車行駛。如果前車的速度減緩或停車,自適應巡航系統會自動減速或停車,避免碰撞事故的發生。而在前方道路暢通時,自適應巡航系統則可以自動加速,提高車輛的行駛效率。
2、現有技術中,車輛在自適應巡航系統下進行減速時,通常采用通過液壓制動系統主動增加制動液壓扭矩的方式進行減速,而對于純電動車型和混動車型來說,該方案中,車輛因為減速而產生的機械能未被考慮而造成了浪費。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種車輛能量回收控制方法、裝置、車輛及介質,以通過能量回收操作實現對處于自適應巡航模式下的車輛的機械能的充分利用。
2、一種車輛能量回收控制方法,包括:
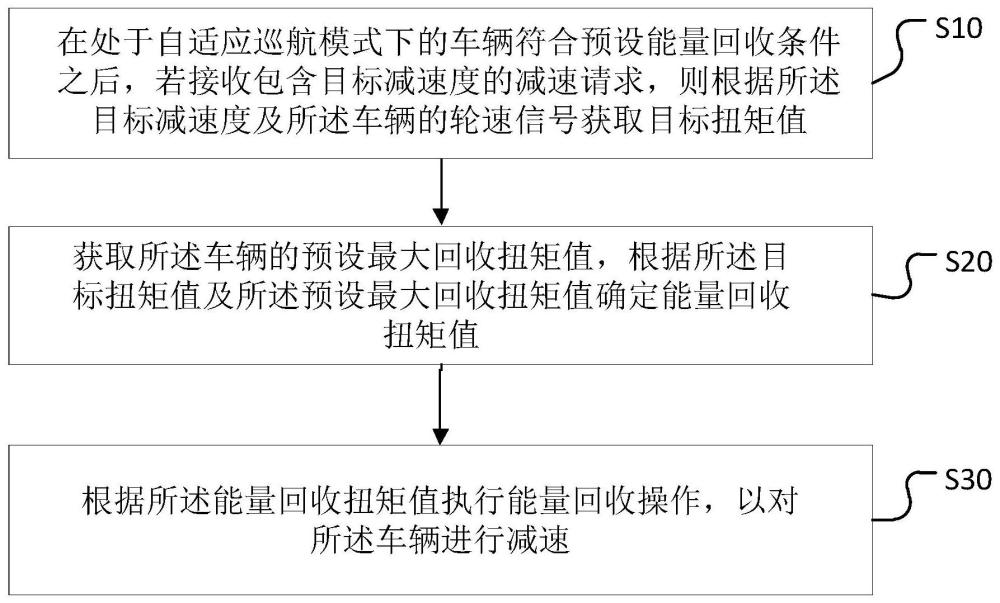
3、在處于自適應巡航模式下的車輛符合預設能量回收條件之后,若接收包含目標減速度的減速請求,則根據所述目標減速度及所述車輛的輪速信號獲取目標扭矩值;
4、獲取所述車輛的預設最大回收扭矩值,根據所述目標扭矩值及所述預設最大回收扭矩值確定能量回收扭矩值;
5、根據所述能量回收扭矩值執行能量回收操作,以對所述車輛進行減速。
6、一種車輛能量回收控制裝置,包括:
7、獲取所述車輛的當前電源檔位、動力系統狀態、自適應巡航模式及當前車輛檔位;
8、在所述當前電源檔位處于開啟檔位、所述動力系統狀態處于行駛狀態、所述自適應巡航模式處于激活狀態,且所述當前車輛檔位處于d檔時,確認所述車輛滿足預設能量回收條件。
9、一種車輛,包括能量回收系統、液壓制動系統,以及連接所述能量回收系統和所述液壓制動系統的控制模塊。
10、一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有計算機程序,所述計算機程序被處理器執行時實現上述車輛能量回收控制方法。
11、上述車輛能量回收控制方法、裝置、計算機設備及存儲介質,在處于自適應巡航模式下的車輛符合預設能量回收條件之后,若接收包含目標減速度的減速請求,則根據目標減速度及車輛的輪速信號獲取目標扭矩值,之后獲取車輛的預設最大回收扭矩值,根據目標扭矩值及預設最大回收扭矩值確定能量回收扭矩值,最后根據所述能量回收扭矩值執行能量回收操作,以對所述車輛進行減速。
12、本發明首先確定處于自適應巡航模式下的車輛進行能量回收操作對應的能量回收扭矩值,從而根據該能量回收扭矩值進行能量回收以使車輛進行減速,實現了車輛在自適應巡航模式下通過能量回收進行減速的功能,對處于自適應巡航模式下的車輛的機械能進行了充分利用有效,避免了機械能的浪費,提高了車輛的能量利用效率,減少能源浪費。同時,本發明中根據目標減速度及車輛的輪速信號獲取目標扭矩值,根據目標扭矩值及預設最大回收扭矩值確定能量回收扭矩值,提高了車輛進行能量回收的精準性。
技術特征:
1.一種車輛能量回收控制方法,其特征在于,包括:
2.如權利要求1所述的車輛能量回收控制方法,其特征在于,所述接收包含目標減速度的減速請求之前,包括:
3.如權利要求1所述的車輛能量回收控制方法,其特征在于,所述若接收包含目標減速度的減速請求,則根據所述目標減速度及所述車輛的輪速信號獲取目標扭矩值,包括:
4.如權利要求1所述的車輛能量回收控制方法,其特征在于,所述根據所述目標扭矩值及所述預設最大回收扭矩值確定能量回收扭矩值,包括:
5.如權利要求1所述的車輛能量回收控制方法,其特征在于,所述根據所述目標扭矩值及所述預設最大回收扭矩值確定能量回收扭矩值,包括:
6.如權利要求5所述的車輛能量回收控制方法,其特征在于,所述在所述目標扭矩值大于所述預設最大回收扭矩值時,將所述預設最大回收扭矩值確定為所述能量回收扭矩值之后,還包括:
7.如權利要求1所述的車輛能量回收控制方法,其特征在于,所述根據所述能量回收扭矩值執行能量回收操作,包括:
8.一種車輛能量回收控制裝置,其特征在于,包括:
9.一種車輛,其特征在于,包括能量回收系統、液壓制動系統,以及連接所述能量回收系統和所述液壓制動系統的控制模塊;所述控制模塊用于執行如權利要求1至7中任一項所述車輛能量回收控制方法。
10.一個或多個存儲有計算機可讀指令的可讀存儲介質,所述計算機可讀指令被一個或多個處理器執行時,使得所述一個或多個處理器執行如權利要求1至7中任一項所述車輛能量回收控制方法。
技術總結
本發明涉及汽車技術領域,本發明公開了一種車輛能量回收控制方法、裝置、車輛及存儲介質,所述方法包括:在處于自適應巡航模式下的車輛符合預設能量回收條件之后,若接收包含目標減速度的減速請求,則根據目標減速度及車輛的輪速信號獲取目標扭矩值;獲取車輛的預設最大回收扭矩值,根據目標扭矩值及預設最大回收扭矩值確定能量回收扭矩值;根據能量回收扭矩值執行能量回收操作,以對車輛進行減速。本發明實現了對處于自適應巡航模式下的車輛的機械能的充分利用,提高了車輛的能源利用效率。
技術研發人員:顧敦位,劉燕,周靜萍,段曉航,龍敏
受保護的技術使用者:廣州汽車集團股份有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!