一種焊接機器人的制作方法
本申請涉及焊接設備,具體涉及一種焊接機器人。
背景技術:
1、焊接機器人是從事焊接的工業機器人,焊接機器人主要包括機器人和焊接設備兩部分。通常會在機器人的末軸法蘭上安裝焊鉗或焊槍,使之能進行焊接操作,為了適應不同的用途,使用過程中需要對焊槍進行更換,現有的焊接機器人在使用時,一般采用螺釘連接或者卡接的方式對焊槍進行安裝固定,采用螺釘連接的方式無法使焊槍被固定在中心位置處,采用卡接的方式無法確保焊槍的安裝深度,大大影響了焊槍的安裝精度,從而需要焊接機器人對焊接路徑進行重新調試,導致效率低下,且不易于拆裝焊槍。
技術實現思路
1、有鑒于此,本申請提供一種焊接機器人,能夠對焊槍進行快速地定位安裝,以解決效率低下以及不易拆裝焊槍的技術問題。
2、為實現上述目的,本發明提供如下技術方案:
3、一種焊接機器人,包括:機器人本體和可拆卸地安裝在所述機器人本體上的焊槍組件,所述機器人本體的末端法蘭盤上設有安裝套管,所述安裝套管上設有限位機構和一對夾持機構,所述焊槍組件包括依次設置的焊槍本體、焊槍座、肩部和第一凸軸,所述肩部能夠與所述限位機構相抵持實現對所述焊槍組件的軸向限位,所述第一凸軸插入所述安裝套管后通過所述夾持機構進行夾持固定。
4、進一步地,所述限位機構包括滑動穿設在所述安裝套管上的限位板以及用于驅動所述限位板靠近或遠離所述的安裝套管的軸心的驅動機構,所述限位板靠近所述安裝套管的軸心時實現對所述焊槍組件的軸向限位。
5、進一步地,所述驅動機構包括固定設置在所述安裝套管上的第一安裝箱、水平滑動穿設在所述第一安裝箱上的拉桿以及設置在所述第一安裝箱上并使所述拉桿向所述第一安裝箱內移動的第一壓縮彈簧,所述拉桿的內端與滑動設置在所述第一安裝箱內的移動塊連接,所述移動塊上設有凸桿,所述凸桿上具有第二凸軸,所述限位板上設有導向槽,所述第二凸軸滑動穿設在所述導向槽內。
6、更進一步地,所述夾持機構包括滑動設置在所述安裝套管內的夾持板以及設置在所述安裝套管上且用于驅動所述夾持板靠近或遠離所述的安裝套管的軸心的夾持驅動機構。
7、更進一步地,所述夾持驅動機構包括固定設置在所述安裝套管上的第二安裝箱、樞接在所述第二安裝箱上的絲桿、滑動設置在所述第二安裝箱上且與所述絲桿螺紋配合的移動板以及用于對所述絲桿進行鎖定的鎖定機構,所述安裝套管上滑動穿設有推桿,所述推桿的外端與所述移動板連接,所述推桿的內端與所述夾持板連接。
8、更進一步地,所述鎖定機構包括滑動設置在所述第二安裝箱上的壓板以及設置在所述壓板上的卡桿,所述絲桿上設有轉板,所述轉板上設有呈環形分布的多個通孔,所述第二安裝箱上設有驅動所述壓板移動以帶動所述卡桿插入對應的所述通孔內的第二壓縮彈簧。
9、更進一步地,所述夾持板的夾持面上設有可拆卸的絕緣板,所述絕緣板與所述第一凸軸相抵觸。
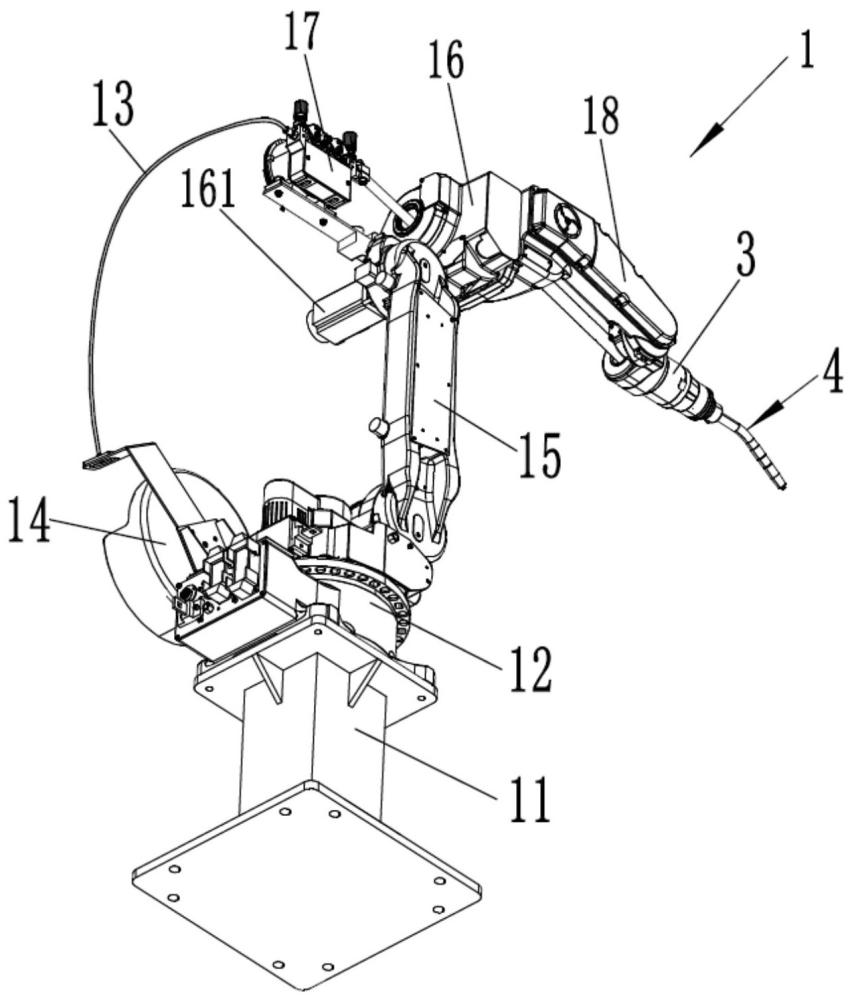
10、更進一步地,所述機器人本體包括:基座;轉座,位于所述基座的上表面,所述轉座與所述基座傳動連接,用于所述焊接機器人的整體回轉;大臂,與所述轉座遠離所述基座的一端傳動連接;中臂,與所述大臂遠離所述轉座的一端傳動連接;小臂,與所述中臂遠離所述大臂的一端傳動連接;腕部:所述腕部的一端與設置在所述小臂上的腕部減速器的輸出軸連接,所述末端法蘭盤設置在所述腕部遠離所述小臂的一端上;焊絲儲存器,安裝在所述轉座上,用于儲存焊絲;送絲機,安裝在所述中臂與所述大臂的連接處,用于自動輸送焊絲,所述焊絲儲存器與所述送絲機之間設有用于對焊絲進行導向的送絲套管。
11、更進一步地,所述轉座上設置有第一電機,所述第一電機的輸出軸與所述基座傳動連接;所述轉座與所述大臂連接處設置有第二電機,所述第二電機的輸出軸與所述大臂的一端傳動連接;所述中臂的一端與所述大臂連接處設置有第三電機,所述第三電機的輸出軸與所述大臂的另一端傳動連接;所述中臂的另一端與所述小臂的一端活動連接,所述中臂的遠離所述大臂的一端設置有第四電機,所述第四電機的輸出軸與所述小臂的一端傳動連接;所述小臂上設置有第五電機,所述第五電機用于控制所述腕部減速器;所述腕部內設置有第六電機,所述第六電機用于控制所述焊槍組件的旋轉。
12、更進一步地,所述限位機構的數量為兩個或者三個。
13、從上述的技術方案可以看出,本發明的優點是:
14、1.本申請中設有限位機構和一對夾持機構,通過限位機構對焊槍組件進行軸向定位,通過一對夾持機構對焊槍組件進行夾持固定,確保焊槍能夠被固定在中心位置處,且使焊槍具有穩定的安裝深度,從而整體提高了焊槍組件的安裝精度,提高了整體的效率。
15、2.本申請通過限位機構對焊槍組件進行軸向限位后,即可通過夾持機構對焊槍組件進行夾持固定,相對于通過螺釘進行連接的方式,操作更方便,易于更換焊槍組件,且穩定可靠。
技術特征:
1.一種焊接機器人,包括:機器人本體(1)和可拆卸地安裝在所述機器人本體(1)上的焊槍組件(4),其特征在于,所述機器人本體(1)的末端法蘭盤(19)上設有安裝套管(3),所述安裝套管(3)上設有限位機構(6)和一對夾持機構(7),所述焊槍組件(4)包括依次設置的焊槍本體(41)、焊槍座(42)、肩部(43)和第一凸軸(44),所述肩部(43)能夠與所述限位機構(6)相抵持實現對所述焊槍組件(4)的軸向限位,所述第一凸軸(44)插入所述安裝套管(3)后通過所述夾持機構(7)進行夾持固定;
2.根據權利要求1所述的焊接機器人,其特征在于,所述夾持機構(7)包括滑動設置在所述安裝套管(3)內的夾持板(78)以及設置在所述安裝套管(3)上且用于驅動所述夾持板(78)靠近或遠離所述的安裝套管(3)的軸心的夾持驅動機構。
3.根據權利要求2所述的焊接機器人,其特征在于,所述夾持驅動機構包括固定設置在所述安裝套管(3)上的第二安裝箱(71)、樞接在所述第二安裝箱(71)上的絲桿(74)、滑動設置在所述第二安裝箱(71)上且與所述絲桿(74)螺紋配合的移動板(76)以及用于對所述絲桿(74)進行鎖定的鎖定機構(73),所述安裝套管(3)上滑動穿設有推桿(77),所述推桿(77)的外端與所述移動板(76)連接,所述推桿(77)的內端與所述夾持板(78)連接。
4.根據權利要求3所述的焊接機器人,其特征在于,所述鎖定機構(73)包括滑動設置在所述第二安裝箱(71)上的壓板(732)以及設置在所述壓板(732)上的卡桿(735),所述絲桿(74)上設有轉板(72),所述轉板(72)上設有呈環形分布的多個通孔(721),所述第二安裝箱(71)上設有驅動所述壓板(732)移動以帶動所述卡桿(735)插入對應的所述通孔(721)內的第二壓縮彈簧(733)。
5.根據權利要求2所述的焊接機器人,其特征在于,所述夾持板(78)的夾持面上設有可拆卸的絕緣板(79),所述絕緣板(79)與所述第一凸軸(44)相抵觸。
6.根據權利要求1所述的焊接機器人,其特征在于,所述機器人本體(1)包括:
7.根據權利要求6所述的焊接機器人,其特征在于,所述轉座(12)上設置有第一電機(121),所述第一電機(121)的輸出軸與所述基座(11)傳動連接;所述轉座(12)與所述大臂(15)連接處設置有第二電機(151),所述第二電機(151)的輸出軸與所述大臂(15)的一端傳動連接;所述中臂(16)的一端與所述大臂(15)連接處設置有第三電機(161),所述第三電機(161)的輸出軸與所述大臂(15)的另一端傳動連接;所述中臂(16)的另一端與所述小臂(18)的一端活動連接,所述中臂(16)的遠離所述大臂(15)的一端設置有第四電機,所述第四電機的輸出軸與所述小臂(18)的一端傳動連接;所述小臂(18)上設置有第五電機,所述第五電機用于控制所述腕部減速器;所述腕部(2)內設置有第六電機,所述第六電機用于控制所述焊槍組件(4)的旋轉。
8.根據權利要求1所述的焊接機器人,其特征在于,所述限位機構(6)的數量為兩個或者三個。
技術總結
本申請公開了一種焊接機器人,涉及焊接設備技術領域,包括:機器人本體和可拆卸地安裝在所述機器人本體上的焊槍組件,所述機器人本體的末端法蘭盤上設有安裝套管,所述安裝套管上設有限位機構和一對夾持機構,所述焊槍組件包括依次設置的焊槍本體、焊槍座、肩部和第一凸軸,所述肩部能夠與所述限位機構相抵持實現對所述焊槍組件的軸向限位,所述第一凸軸插入所述安裝套管后通過所述夾持機構進行夾持固定。本申請通過限位機構對焊槍組件進行軸向定位,通過一對夾持機構對焊槍組件進行夾持固定,確保焊槍能夠被固定在中心位置處,且使焊槍具有穩定的安裝深度,從而整體提高了焊槍組件的安裝精度,提高了整體的效率。
技術研發人員:吳浠鎣,吳琳煒,吳團結,吳燕燕,吳偉鴻,吳晶怡,吳振霖
受保護的技術使用者:晉江新建興機械設備有限公司
技術研發日:
技術公布日:2024/10/14
- 還沒有人留言評論。精彩留言會獲得點贊!