一種用于智能數字化裝配的機械手的制作方法
本發明涉及智能制造,具體是一種用于智能數字化裝配的機械手。
背景技術:
1、產品裝配是產品生命周期中的一個重要環節,隨著科技發展,產品線上的自動裝配技術發展也越來越快,智能數字化裝配能夠通過便捷的人機交互界面操作和模擬環境操作、預測、顯示、檢驗以及評價產品的可裝配性,進而減少不必要的經濟成本。
2、在公開專利中(公開號:cn118305559a)公開了一種機械手,通過夾持單元和二次定位單元設計,方便對異形結構件的工件主體進行夾持,夾持過程中,偏轉單元使得夾持單元對工件主體夾持位置接觸面積大,二次夾持座適用于具有更加復雜零件面的定位夾持輔助。但是該現有技術公開的方案中,當偏轉機構帶動夾持單元對異形結構件進行夾持時,夾持單元在與異形面接觸時,可能會產生一個推力,將結構件向外推出,導致夾持單元夾空的問題出現。
3、因此,針對上述提出的問題,現在急需一種機械手,在對異形結構進行夾持,不僅可以快速定位,而且還可以穩定將結構件夾起。
技術實現思路
1、本發明的目的在于提供一種用于智能數字化裝配的機械手,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:
3、一種用于智能數字化裝配的機械手,包括:支撐板;橫向移動機構,安裝于所述支撐板上,用于控制x軸方向上的移動;豎向移動機構,與所述橫向移動機構呈垂直設置,用于控制y軸方向上的移動;抓取機構,設置在所述豎向移動機構的下方,且可以在所述豎向移動機構內上下移動。
4、作為本發明再進一步的方案:其中,所述橫向移動機構包括一端與所述支撐板呈十字連接的固定板,所述固定板的上下兩側固定安裝有凸起的導軌一,兩個所述導軌一與所述固定板之間形成的凹槽內轉動連接有傳動組件,所述豎向移動機構包括背板,所述背板與所述導軌一之間通過導向座一連接,所述導向座一與傳動組件上設置的傳動帶連接。
5、作為本發明再進一步的方案:其中,所述豎向移動機構還包括固定安裝在所述背板上的步進電機,所述步進電機的輸出端固定安裝有絲杠,所述絲杠上螺紋設置有可上下移動的螺紋筒;所述背板的左右兩側固定安裝有導軌二,所述抓取機構包括背面與螺紋筒固定連接的連接板,所述連接板的左右兩側固定安裝有與導軌二滑動連接的導向座二。
6、作為本發明再進一步的方案:其中,所述連接板在遠離導軌二的端面上設置有導向機構,所述導向機構包括與所述連接板固定連接的導向板,所述導向板的上下兩側開設有導向槽,且在所述導向槽的左右兩側滑動連接有l形板,所述導向板上還設置有驅動件,所述l形板的底部通過連接桿固定安裝有夾持板。
7、作為本發明再進一步的方案:其中,所述夾持板上設置有吸盤機構,所述吸盤機構包括設置在兩個所述夾持板內側的吸嘴。
8、作為本發明再進一步的方案:其中,所述夾持板的外側滑動連接有連接筒,所述連接筒通過連接彈簧與定位板連接,所述吸嘴通過連接筒與連接管,所述吸嘴與所述連接筒固定連接,所述連接管貫穿所述連接彈簧與所述定位板固定連接。
9、作為本發明再進一步的方案:其中,所述連接桿上固定安裝有固定座,所述固定座通過兩端轉動連接的導桿分別與定位板的兩側鉸接,所述定位板的兩側開設有滑動槽,所述滑動槽的內部滑動連接有與導桿鉸接的滑動齒板。
10、作為本發明再進一步的方案:其中,所述定位板上轉動連接有與所述滑動齒板嚙合連接的主動齒輪,所述主動齒輪的上方設置有同軸轉動的從動齒輪,所述從動齒輪上嚙合連接有貫穿所述定位板的推動桿,所述夾持板的兩側分別設置有與所述推動桿相對應的限位桿。
11、作為本發明再進一步的方案:其中,所述定位板的側面上開設有開口槽,所述滑動齒板上設置有延伸出開口槽并固定安裝有摩擦板的連接柱,通過滑動齒板在移動過程中會通過連接柱的配合帶動摩擦板在定位板的側壁上滑動,進而來增加滑動齒板移動時所需要的力。
12、作為本發明再進一步的方案:其中,所述限位桿為伸縮結構設計,包括桿一和桿二以及在所述桿一和桿二之間設置的移動彈簧。
13、與現有技術相比,本發明的有益效果是:
14、1、本實施例中的機械手,通過夾持板的相互靠近,帶動吸嘴與異形結構件的表面接觸之后,會因為異形面的作用,從而對每個吸嘴產生不同的力,較寬的面在與吸嘴接觸之后會推動連接筒向外運動,因此由于異形面的存在,所以連通筒伸出的長度就會出現不同,從而定位板的角度被改變,當寬面出現在靠近支撐板的端面上時,此時連接筒伸出的長度就最長,導致定位板逆時針偏轉。從而滿足了多個吸嘴在面對不同的異形面時,可以更好的完成貼合吸附的效果。
15、2、本實施例中的機械手,通過夾持板靠近結構件,結構件的異形面改變了吸嘴的分布方式,從而改變了定位板的角度,此時,因為定位板產生逆時針偏轉,所以在導桿的作用下會拖動滑動齒板在滑動槽的內部向內滑動而帶動主動齒輪逆時針轉動,主動齒輪因為與從動齒輪同軸設計,所述從動齒輪也跟隨同步轉動;進而在嚙合作用下從動齒輪帶動推動桿向夾持板靠近,靠近夾持板的推動桿會與限位桿接觸,限位桿被推動靠近結構件,在逐漸增加夾持力的作用下,由于限位桿作用于結構件表面的緣故,會避免結構件出現滑移的問題。從而增加了該機械手在夾取異形結構件的穩定效果。
技術特征:
1.一種用于智能數字化裝配的機械手,其特征在于,包括:
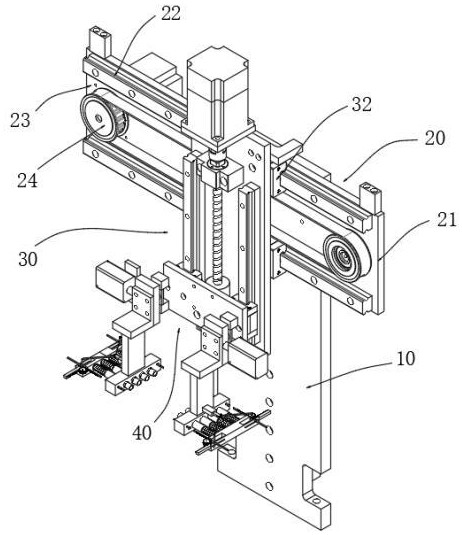
2.根據權利要求1所述的用于智能數字化裝配的機械手,其特征在于,所述橫向移動機構(20)包括一端與所述支撐板(10)呈十字連接的固定板(21),所述固定板(21)的上下兩側固定安裝有凸起的導軌一(22),兩個所述導軌一(22)與所述固定板(21)之間形成的凹槽(23)內轉動連接有傳動組件(24),所述豎向移動機構(30)包括背板(31),所述背板(31)與所述導軌一(22)之間通過導向座一(32)連接,所述導向座一(32)與傳動組件(24)上設置的傳動帶連接。
3.根據權利要求2所述的用于智能數字化裝配的機械手,其特征在于,所述豎向移動機構(30)還包括固定安裝在所述背板(31)上的步進電機(33),所述步進電機(33)的輸出端固定安裝有絲杠(34),所述絲杠(34)上螺紋設置有可上下移動的螺紋筒(35);所述背板(31)的左右兩側固定安裝有導軌二(36),所述抓取機構(40)包括背面與螺紋筒(35)固定連接的連接板(41),所述連接板(41)的左右兩側固定安裝有與導軌二(36)滑動連接的導向座二(42)。
4.根據權利要求3所述的用于智能數字化裝配的機械手,其特征在于,所述連接板(41)在遠離導軌二(36)的端面上設置有導向機構(50),所述導向機構(50)包括與所述連接板(41)固定連接的導向板(51),所述導向板(51)的上下兩側開設有導向槽(52),且在所述導向槽(52)的左右兩側滑動連接有l形板(53),所述導向板(51)上還設置有驅動件(54),所述l形板(53)的底部通過連接桿(55)固定安裝有夾持板(56)。
5.根據權利要求4所述的用于智能數字化裝配的機械手,其特征在于,所述夾持板(56)上設置有吸盤機構(60),所述吸盤機構(60)包括設置在兩個所述夾持板(56)內側的吸嘴(61)。
6.根據權利要求5所述的用于智能數字化裝配的機械手,其特征在于,所述夾持板(56)的外側滑動連接有連接筒(57),所述連接筒(57)通過連接彈簧(58)與定位板(70)連接,所述吸嘴(61)通過連接筒(57)與連接管,所述吸嘴(61)與所述連接筒(57)固定連接,所述連接管貫穿所述連接彈簧(58)與所述定位板(70)固定連接。
7.根據權利要求6所述的用于智能數字化裝配的機械手,其特征在于,所述連接桿(55)上固定安裝有固定座(71),所述固定座(71)通過兩端轉動連接的導桿(72)分別與定位板(70)的兩側鉸接,所述定位板(70)的兩側開設有滑動槽(73),所述滑動槽(73)的內部滑動連接有與導桿(72)鉸接的滑動齒板(74)。
8.根據權利要求6所述的用于智能數字化裝配的機械手,其特征在于,所述定位板(70)上轉動連接有與所述滑動齒板(74)嚙合連接的主動齒輪(75),所述主動齒輪(75)的上方設置有同軸轉動的從動齒輪(76),所述從動齒輪上嚙合連接有貫穿所述定位板(70)的推動桿(77),所述夾持板(56)的兩側分別設置有與所述推動桿(77)相對應的限位桿(78)。
9.根據權利要求8所述的用于智能數字化裝配的機械手,其特征在于,所述定位板(70)的側面上開設有開口槽,所述滑動齒板(74)上設置有延伸出開口槽并固定安裝有摩擦板的連接柱,通過滑動齒板(74)在移動過程中會通過連接柱的配合帶動摩擦板在定位板(70)的側壁上滑動,進而來增加滑動齒板(74)移動時所需要的力。
10.根據權利要求8所述的用于智能數字化裝配的機械手,其特征在于,所述限位桿(78)為伸縮結構設計,包括桿一和桿二以及在所述桿一和桿二之間設置的移動彈簧。
技術總結
本發明公開了一種用于智能數字化裝配的機械手,屬于智能制造技術領域,包括支撐板;橫向移動機構,安裝于所述支撐板上,用于控制X軸方向上的移動;豎向移動機構,與所述橫向移動機構呈垂直設置,用于控制Y軸方向上的移動;抓取機構。通過夾持板的相互靠近,帶動吸嘴與異形結構件的表面接觸之后,會因為異形面的作用,從而對每個吸嘴產生不同的力,較寬的面在與吸嘴接觸之后會推動連接筒向外運動,因此由于異形面的存在,所以連通筒伸出的長度就會出現不同,從而定位板的角度被改變,當寬面出現在靠近支撐板的端面上時,此時連接筒伸出的長度就最長,導致定位板逆時針偏轉。滿足了多個吸嘴在面對不同的異形面時,可以更好的完成貼合吸附的效果。
技術研發人員:付程晨
受保護的技術使用者:南通天欣機械制造有限公司
技術研發日:
技術公布日:2024/10/14
- 還沒有人留言評論。精彩留言會獲得點贊!