一種高精度分度裝置及分度方法
本申請涉及分度,具體涉及一種高精度分度裝置及分度方法。
背景技術:
1、回轉工作臺是銑床的主要附件之一,以蝸輪蝸桿機構為主體的常規萬能分度盤得到了廣泛使用,其特點是體積小,重心低,一般為扁平結構,分度精度高,可以實現自鎖。蝸桿每轉動一周對應著蝸輪轉動一齒所對應的圓周角,如型號為tsl的臥式萬能分度盤,蝸輪蝸桿減速比1:90,把手回轉一圈對應著工作臺轉動4度,有刻度值為1分的刻度環和最小分化值為10秒的游標環。
2、要想得到很高精度的分度,一般采用較多齒數的蝸輪,也就意味著蝸輪盤的直徑很大,然而過分擴大直徑來提高分度精度在現實中是不合適的;也有采用多級齒輪嚙合作為分度裝置,然而一般齒輪嚙合沒有自鎖功能,需增設鎖緊裝置。因而設計一款直徑有限但分度精度又很高的超高精度的分度裝置就很有現實意義。
技術實現思路
1、本申請的目的在于提供一種高精度分度裝置及分度方法,以解決現有技術中分度裝置難以在小尺寸體積下具有較高的分度精度及自鎖功能的問題。
2、為達到上述目的,本申請是采用下述技術方案實現的:
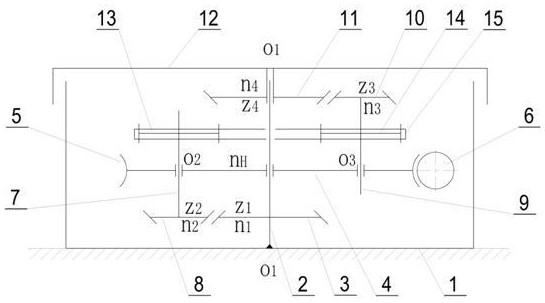
3、一種高精度分度裝置,包括分度盤殼體、中心軸、蝸桿和分度盤;
4、所述中心軸固定設置在所述分度盤殼體的中心處,所述中心軸的下部固定有固定太陽輪,中間部轉動設有蝸輪盤、上部轉動設有轉動太陽輪,所述分度盤工作臺固定在所述固定太陽輪的頂端;
5、所述蝸桿轉動設置在分度盤殼體內,且所述蝸桿和蝸輪盤周邊的蝸輪相嚙合;
6、所述蝸輪盤上垂直轉動設有行星軸一和行星軸二,所述行星軸一的底端固定有和所述固定太陽輪外嚙合的行星輪一,所述行星軸二的頂端固定有和所述轉動太陽輪外嚙合的行星輪二;所述行星軸一上設有齒輪一,所述行星軸二上設有齒輪二,所述齒輪一和齒輪二轉動連接。
7、進一步的,所述齒輪一和齒輪二通過同步鏈連接。
8、進一步的,所述固定太陽輪的齒數z1與所述轉動太陽輪的齒數z4的關系為z1=z-4。
9、進一步的,所述行星輪一與所述行星輪二具有相同的齒數。
10、進一步的,所述蝸桿可通過手動或伺服電機驅動。
11、進一步的,所述轉動太陽輪的模數與所述固定太陽輪的模數相同或不同,且轉動太陽輪和固定太陽輪均采用標準的齒輪模數。
12、進一步的,所述分度盤殼體的形狀為圓形,所述中心軸設置在所述分度盤殼體的圓心軸線處。
13、進一步的,所述蝸輪盤的直徑大于固定太陽輪、行星輪一、行星輪二、轉動太陽輪齒輪一和齒輪二的直徑。
14、進一步的,所述轉動太陽輪的齒數為30-40,所述蝸輪的齒數為60-70。
15、第二方面,本申請公開了一種分度方法,采用第一方面任一項所述的分度裝置,方法包括:
16、根據分度裝置的設計參數確定轉動太陽輪的齒數及蝸輪的齒數;
17、計算分度精度p;其中,所述分度精度p的表達式為:p=360°/(z4·z5),z4為轉動太陽輪的齒數,z5為蝸輪的齒數;
18、根據待分度角度及分度精度p計算蝸桿的轉動圈數o;o=;
19、根據計算的轉動圈數o控制蝸桿完成相應圈數的轉動。
20、本申請的有益效果為:
21、本設計的分度裝置運用蝸輪蝸桿與周轉輪系的結合,使蝸輪蝸桿具有的高減速比與周轉輪系的高減速比相結合,達到了很高的分度精度;
22、由于采用了蝸輪蝸桿與周轉輪系相結合,不再需要采用過大齒數的蝸輪來獲得很高的分度精度,且蝸輪與太陽輪為同軸設置,因此總體直徑比常規高精度的蝸輪蝸桿分度盤直徑小,裝置尺寸僅比蝸輪盤的齒輪略大;
23、由于采用了蝸輪蝸桿機構,該裝置具有自然自鎖的功能,即蝸輪很難反向驅動蝸桿,這有助于保持分度位置的穩定性。在靜止狀態下,即使外力作用于分度盤工作臺,也難以使蝸輪反向轉動,從而避免了不必要的位移。
技術特征:
1.一種高精度分度裝置,其特征在于,包括分度盤殼體(1)、中心軸(2)、蝸桿(6)和分度盤(12);
2.根據權利要求1所述的高精度分度裝置,其特征在于,所述齒輪一(13)和齒輪二(14)通過同步鏈(15)連接。
3.根據權利要求2所述的高精度分度裝置,其特征在于,所述固定太陽輪(3)的齒數z1與所述轉動太陽輪(11)的齒數z4的關系為z1=z4-1。
4.根據權利要求3所述的高精度分度裝置,其特征在于,所述行星輪一(8)與所述行星輪二(10)具有相同的齒數。
5.根據權利要求1所述的高精度分度裝置,其特征在于,所述蝸桿(6)可通過手動或伺服電機驅動。
6.根據權利要求1所述的高精度分度裝置,其特征在于,所述轉動太陽輪(11)的模數與所述固定太陽輪(3)的模數相同或不同,且轉動太陽輪(11)和固定太陽輪(3)均采用標準的齒輪模數。
7.根據權利要求1所述的高精度分度裝置,其特征在于,所述分度盤殼體(1)的形狀為圓形,所述中心軸(2)設置在所述分度盤殼體(1)的圓心軸線處。
8.根據權利要求1所述的高精度分度裝置,其特征在于,所述蝸輪盤(4)的直徑大于固定太陽輪(3)、行星輪一(8)、行星輪二(10)、轉動太陽輪(11)齒輪一(13)和齒輪二(14)的直徑。
9.根據權利要求1所述的高精度分度裝置,其特征在于,所述轉動太陽輪(11)的齒數為30-40,所述蝸輪(5)的齒數為60-70。
10.一種分度方法,其特征在于,采用權利要求1-9任一項所述的分度裝置,方法包括:
技術總結
本申請公開了一種高精度分度裝置,包括分度盤殼體、中心軸、蝸桿和分度盤;中心軸固定設置在分度盤殼體的中心處,中心軸的下部固定有固定太陽輪,中間部轉動設有蝸輪盤、上部轉動設有轉動太陽輪,分度盤工作臺固定在固定太陽輪的頂端;蝸桿轉動設置在分度盤殼體內,且蝸桿和蝸輪盤周邊的蝸輪相嚙合;蝸輪盤上垂直轉動設有行星軸一和行星軸二,行星軸一的底端固定有和固定太陽輪外嚙合的行星輪一,行星軸二的頂端固定有和轉動太陽輪外嚙合的行星輪二;行星軸一上設有齒輪一,行星軸二上設有齒輪二,齒輪一和齒輪二轉動連接。本申請在小尺寸體積下具有較高的分度精度,并具有良好的自鎖性能。
技術研發人員:劉曉強,朱啟文,周召信
受保護的技術使用者:南京信息職業技術學院
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!