一種焊接機器人加工高效操作臺的制作方法
本技術屬于焊接機器人加工,具體涉及一種焊接機器人加工高效操作臺。
背景技術:
1、焊接機器人是從事焊接(包括切割與噴涂)的工業機器人。根據國際標準化組織工業機器人屬于標準焊接機器人的定義,工業機器人是一種多用途的、可重復編程的自動控制操作機,具有三個或更多可編程的軸,用于工業自動化領域。為了適應不同的用途,機器人最后一個軸的機械接口,通常是一個連接法蘭,可接裝不同工具或稱末端執行器。焊接機器人就是在工業機器人的末軸法蘭裝接焊鉗或焊(割)槍的,使之能進行焊接,切割或熱噴涂。
2、中國專利申請號為202021032787.7公開了一種焊接機器人加工用高效操作臺,屬于焊接機器人加工技術領域,一種焊接機器人加工用高效操作臺,包括操作臺本體,操作臺本體上端安裝有封閉倉,操作臺本體上端安裝有位于封閉倉內的焊接機器人,封閉倉右端開鑿有料口,操作臺本體上端轉動連接有位于料口內的盤形座,操作臺本體下端固定安裝有步進電機,且步進電機的驅動端貫穿操作臺本體并與盤形座下端固定連接,盤形座上端固定連接有與料口相匹配的隔板,可以實現焊接工作和上、下料工作的同步進行,使工作人員能夠在焊接機器人運行的同時,對工件進行上料和下料,有效避免焊接機器人出現長時間閑置的情況,從而有效提高焊接機器人的焊接加工效率。
3、上述公開的專利雖然實現了焊接機器人的高效焊接,但是其在使用時焊接產生的有害氣體會污染環境,且操作臺比較笨重不便進行移動。
技術實現思路
1、為解決上述背景技術中提出的問題。本實用新型提供了一種焊接機器人加工高效操作臺,具有保護環境、便于移動的特點。
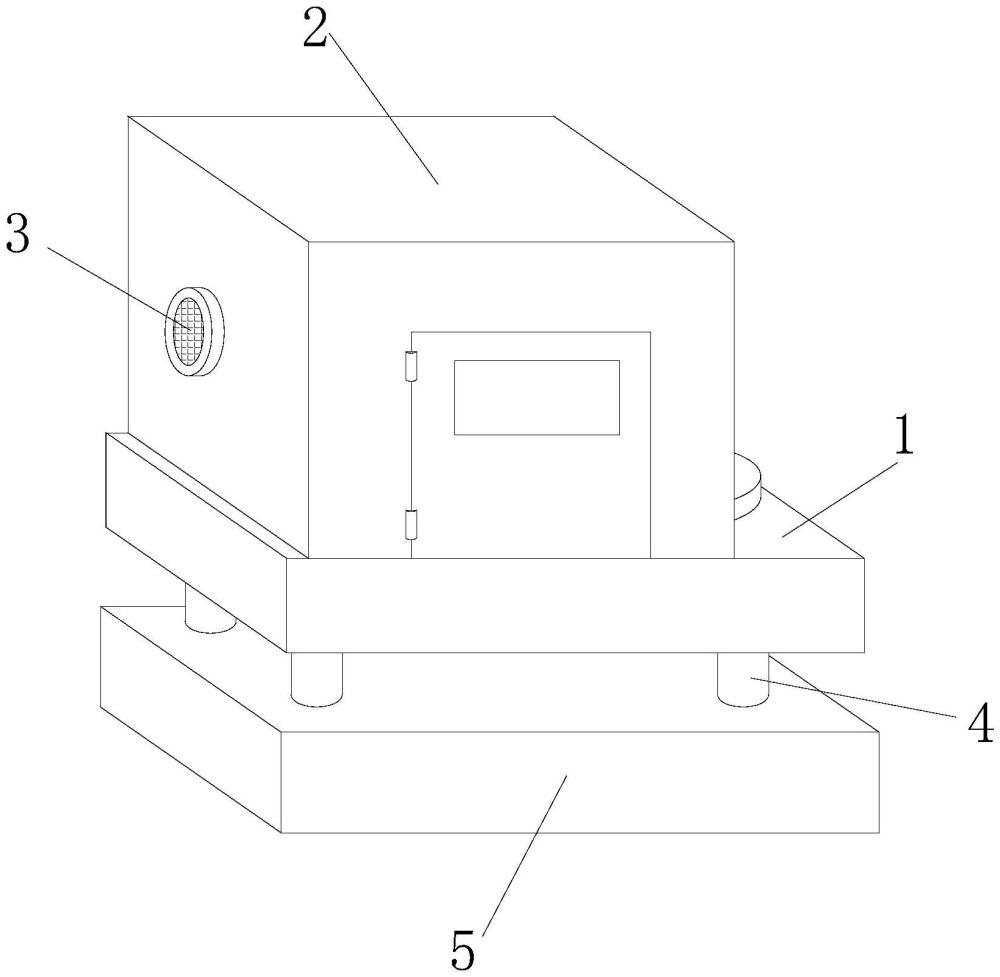
2、為實現上述目的,本實用新型提供如下技術方案:一種焊接機器人加工高效操作臺,包括操作臺本體,所述操作臺本體的上端設置有封閉倉,封閉倉的一側設置有吸附組件,操作臺本體的底部設置有支撐柱,支撐柱的下端設置有移動組件。
3、優選的,所述移動組件包括移動底座、升降電機、驅動螺桿、驅動板、連接架、轉軸和移動輪,其中,支撐柱的下端設置有移動底座,移動底座的內部設置有升降電機,升降電機的下端設置有驅動螺桿,驅動螺桿的表面螺紋連接有驅動板,驅動板的底部連接有連接架,連接架的內部轉動連接有轉軸,轉軸的表面設置有移動輪。
4、優選的,所述驅動板的兩側連接有滑塊,移動底座與滑塊之間設置有滑槽。
5、優選的,所述移動底座的上端設置有安裝塊,支撐柱與安裝塊之間設置有安裝螺栓。
6、優選的,所述吸附組件包括排氣風扇、固定套、活性炭吸附網、限位柱、拉桿和限位彈簧,其中,封閉倉的一側設置有排氣風扇,排氣風扇的一側設置有固定套,固定套的內部設置有活性炭吸附網,活性炭吸附網的下方設置有限位柱,限位柱的下端連接有拉桿,拉桿的表面設置有限位彈簧。
7、優選的,所述限位柱的一側設置有卡塊,限位柱遠離卡塊的一側設置有卡槽。
8、與現有技術相比,本實用新型的有益效果是:
9、1、本實用新型通過設置吸附組件,實現了對封閉倉內焊接產生的有害氣體的吸附,避免了焊接機器人焊接工件產生的有害氣體污染環境的情況發生,通過對焊接產生的氣體進行吸附,從而保護了環境。
10、2、本實用新型通過設置移動組件,實現了對操作臺的便捷移動,避免了操作臺比較笨重不便進行移動的情況發生,使得操作臺既便于移動,又保證了操作臺移動后放置穩定。
技術特征:
1.一種焊接機器人加工高效操作臺,包括操作臺本體,其特征在于:所述操作臺本體的上端設置有封閉倉,封閉倉的一側設置有吸附組件,操作臺本體的底部設置有支撐柱,支撐柱的下端設置有移動組件;
2.根據權利要求1所述的一種焊接機器人加工高效操作臺,其特征在于:所述驅動板的兩側連接有滑塊,移動底座與滑塊之間設置有滑槽。
3.根據權利要求1所述的一種焊接機器人加工高效操作臺,其特征在于:所述移動底座的上端設置有安裝塊,支撐柱與安裝塊之間設置有安裝螺栓。
4.根據權利要求1所述的一種焊接機器人加工高效操作臺,其特征在于:所述限位柱的一側設置有卡塊,限位柱遠離卡塊的一側設置有卡槽。
技術總結
本技術公開了一種焊接機器人加工高效操作臺,屬于焊接機器人加工技術領域,包括操作臺本體,所述操作臺本體的上端設置有封閉倉,封閉倉的一側設置有吸附組件,操作臺本體的底部設置有支撐柱,支撐柱的下端設置有移動組件;本技術通過設置吸附組件,實現了對封閉倉內焊接產生的有害氣體的吸附,避免了焊接機器人焊接工件產生的有害氣體污染環境的情況發生,通過對焊接產生的氣體進行吸附,防止有害氣體直接排放到空氣中,從而保護了環境,通過設置移動組件,實現了對操作臺的便捷移動,避免了操作臺比較笨重不便進行移動的情況發生,使得操作臺既便于移動,又保證了操作臺移動后放置穩定。
技術研發人員:聶國強,潘勝,黃卓富
受保護的技術使用者:沈陽日精機器人技術有限公司
技術研發日:20231229
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!