復雜空間曲線焊縫的自動化焊接設備的制作方法
本發明屬于自動化焊接,具體為復雜空間曲線焊縫的自動化焊接設備。
背景技術:
1、焊接設備是指實現焊接工藝所需要的裝備。焊接設備包括焊機、焊接工藝裝備和焊接輔助器具。焊接設備的主要類型有電焊機、火焰焊設備和其他焊接設備。其中主要是電焊機,它包括如下幾種:電弧焊機,它又分為手工弧焊機(弧焊變壓器、弧焊整流器和弧焊發電機)、埋弧焊機和氣體保護弧焊機(不熔化極氣體保護焊機和熔化極氣體保護焊機);電阻焊機,它分為點焊機、凸焊機、縫焊機和對焊機;其他電焊機,如電渣焊機、等離子弧焊機、高頻焊機、電子束焊機、光束焊機、超聲波焊機、摩擦焊機、冷壓焊機、釬焊機等。
2、對于復雜的空間曲線焊縫,現有焊接設備的焊接行程難以達到,故其一直處于手工半自動焊的狀態,焊接質量差且焊接速度較慢,甚至嚴重影響到工人的身體健康。因此,針對以上現狀,迫切需要提供復雜空間曲線焊縫的自動化焊接設備,以克服當前實際應用中的不足。
技術實現思路
1、針對上述情況,為克服現有技術的缺陷,本發明提供復雜空間曲線焊縫的自動化焊接設備,有效的解決了對于復雜的空間曲線焊縫,現有焊接設備的焊接行程難以達到,故其一直處于手工半自動焊的狀態,焊接質量差且焊接速度較慢,甚至嚴重影響到工人身體健康的問題。
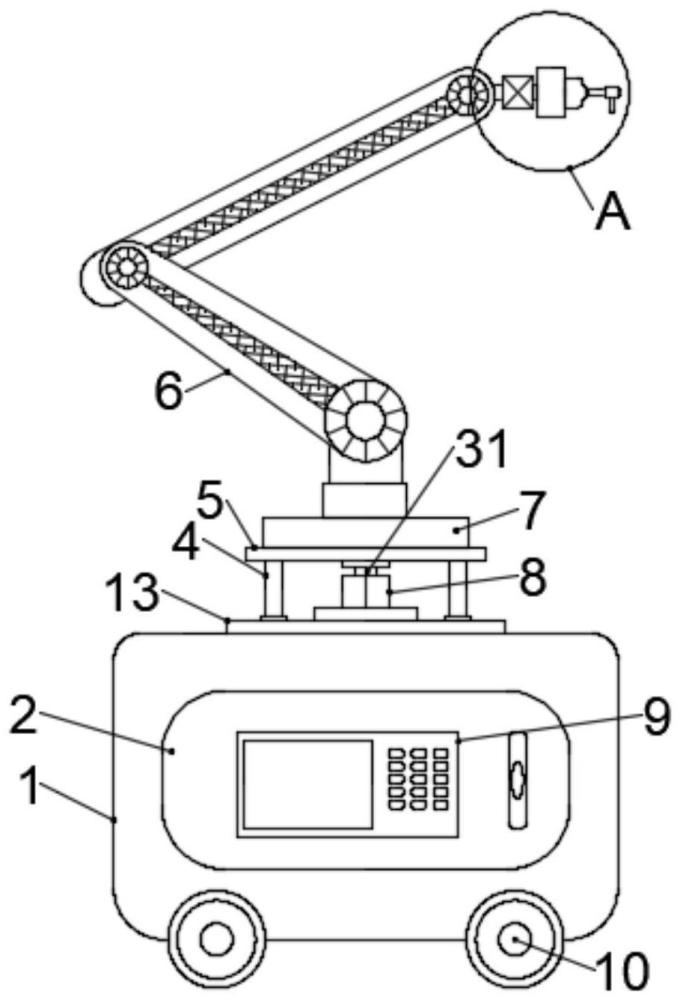
2、為實現上述目的,本發明提供如下技術方案:復雜空間曲線焊縫的自動化焊接設備,包括箱體、機械臂以及焊接模塊,所述機械臂與所述箱體之間通過調節組件連接,所述機械臂上活動安裝有連接桿,且連接桿上還安裝有轉動電機,所述轉動電機上轉動安裝有控制盒,所述焊接模塊安裝固定在所述控制盒上,且控制盒上還至少設置有一組用于對焊縫進行識別的視覺傳感器,所述調節組件包括支撐臺、立板、聯動桿以及支撐板,所述支撐板與所述機械臂之間通過安裝塊連接,所述支撐臺通過立板安裝固定在箱體內,且支撐臺上還轉動安裝有支撐環,所述聯動桿用于所述支撐環與所述支撐板之間的連接,所述箱體內還安裝有用于帶動所述支撐環轉動的驅動組件。
3、優選的,所述調節組件還包括支撐架、驅動塊、第一螺紋桿以及支撐軸,所述支撐架安裝固定在所述支撐臺上,所述驅動塊與所述支撐架之間滑動配合,且驅動塊與支撐架之間不發生相互轉動,所述支撐軸安裝固定在所述驅動塊頂部,且支撐軸與所述支撐板之間通過連接塊轉動連接,所述第一螺紋桿轉動安裝在所述支撐臺上,且第一螺紋桿與所述驅動塊之間螺紋連接,所述箱體內還設置有用于帶動所述第一螺紋桿轉動的第一驅動電機。
4、優選的,所述驅動組件包括第二驅動電機、從動齒、主動齒輪以及支撐環,所述從動齒在所述支撐環上周向均勻分布設置,所述第二驅動電機設置于所述箱體內,所述主動齒輪安裝固定在所述第二驅動電機的輸出軸上,且第二驅動電機與所述從動齒之間嚙合連接。
5、優選的,所述視覺傳感器在所述控制盒上對稱設置兩組,且控制盒內還設置有用于對視覺傳感器工作位置進行調節的控制組件。
6、優選的,所述控制組件包括第二螺紋桿與連接滑塊,所述第二螺紋桿轉動安裝在所述控制盒內,且第二螺紋桿上的螺紋采用對稱且旋向相反結構,所述控制盒上還設置有用于帶動所述第二螺紋桿轉動的第三驅動電機,所述連接滑塊在所述第二螺紋桿上對稱設置兩組,連接滑塊用于所述視覺傳感器與所述第二螺紋桿之間的連接。
7、優選的,所述箱體上還設置有行走機構,所述行走機構包括行走輪以及用于帶動行走輪工作的驅動模塊。
8、優選的,所述箱體上還安裝有檢修門,且所述上還設置有設置面板,所述箱體內還設置有用于配合所述設置面板使用的信息模塊,所述信息模塊用于對所述機械臂、行走機構、轉動電機、第三驅動電機、焊接模塊、第一驅動電機以及第二驅動電機進行控制。
9、優選的,所述箱體上還轉動安裝有旋轉塊,所述旋轉塊與所述聯動桿之間固定連接,所述旋轉塊上還開設有用于驅動塊貫穿的圓形孔。
10、優選的,所述驅動塊采用矩形柱狀結構,且所述支撐架上還開設有用于配合所述驅動塊使用的矩形孔。
11、優選的,所述聯動桿與所述支撐板和所述支撐環之間均采用固定連接,所述聯動桿在所述支撐環上對稱設置兩組,且所述聯動桿為可伸縮型結構。
12、與現有技術相比,本發明的有益效果是:視覺傳感器的設置實現了對復雜空間曲線焊縫的精準識別,配合調節組件以及機械臂對于焊接模塊工作位置的調節處理,實現了對復雜空間曲線焊縫的自動化焊接,避免了手工半自動焊易導致焊接質量差且焊接速度較慢,甚至嚴重影響到工人的身體健康的問題。
技術特征:
1.復雜空間曲線焊縫的自動化焊接設備,包括箱體(1)、機械臂(6)以及焊接模塊(26),其特征在于:所述機械臂(6)與所述箱體(1)之間通過調節組件(11)連接,所述機械臂(6)上活動安裝有連接桿(23),且連接桿(23)上還安裝有轉動電機(24),所述轉動電機(24)上轉動安裝有控制盒(25),所述焊接模塊(26)安裝固定在所述控制盒(25)上,且控制盒(25)上還至少設置有一組用于對焊縫進行識別的視覺傳感器(27),所述調節組件(11)包括支撐臺(16)、立板(17)、聯動桿(4)以及支撐板(5),所述支撐板(5)與所述機械臂(6)之間通過安裝塊(7)連接,所述支撐臺(16)通過立板(17)安裝固定在箱體(1)內,且支撐臺(16)上還轉動安裝有支撐環(22),所述聯動桿(4)用于所述支撐環(22)與所述支撐板(5)之間的連接,所述箱體(1)內還安裝有用于帶動所述支撐環(22)轉動的驅動組件。
2.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述調節組件(11)還包括支撐架(14)、驅動塊(8)、第一螺紋桿(19)以及支撐軸(31),所述支撐架(14)安裝固定在所述支撐臺(16)上,所述驅動塊(8)與所述支撐架(14)之間滑動配合,且驅動塊(8)與支撐架(14)之間不發生相互轉動,所述支撐軸(31)安裝固定在所述驅動塊(8)頂部,且支撐軸(31)與所述支撐板(5)之間通過連接塊(12)轉動連接,所述第一螺紋桿(19)轉動安裝在所述支撐臺(16)上,且第一螺紋桿(19)與所述驅動塊(8)之間螺紋連接,所述箱體(1)內還設置有用于帶動所述第一螺紋桿(19)轉動的第一驅動電機(18)。
3.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述驅動組件包括第二驅動電機(21)、從動齒(15)、主動齒輪(20)以及支撐環(22),所述從動齒(15)在所述支撐環(22)上周向均勻分布設置,所述第二驅動電機(21)設置于所述箱體(1)內,所述主動齒輪(20)安裝固定在所述第二驅動電機(21)的輸出軸上,且第二驅動電機(21)與所述從動齒(15)之間嚙合連接。
4.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述視覺傳感器(27)在所述控制盒(25)上對稱設置兩組,且控制盒(25)內還設置有用于對視覺傳感器(27)工作位置進行調節的控制組件。
5.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述控制組件包括第二螺紋桿(29)與連接滑塊(30),所述第二螺紋桿(29)轉動安裝在所述控制盒(25)內,且第二螺紋桿(29)上的螺紋采用對稱且旋向相反結構,所述控制盒(25)上還設置有用于帶動所述第二螺紋桿(29)轉動的第三驅動電機(28),所述連接滑塊(30)在所述第二螺紋桿(29)上對稱設置兩組,連接滑塊(30)用于所述視覺傳感器(27)與所述第二螺紋桿(29)之間的連接。
6.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述箱體(1)上還設置有行走機構(10),所述行走機構(10)包括行走輪以及用于帶動行走輪工作的驅動模塊。
7.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述箱體(1)上還安裝有檢修門(2),且所述(2)上還設置有設置面板(9),所述箱體(1)內還設置有用于配合所述設置面板(9)使用的信息模塊(3),所述信息模塊(3)用于對所述機械臂(6)、行走機構(10)、轉動電機(24)、第三驅動電機(28)、焊接模塊(26)、第一驅動電機(18)以及第二驅動電機(21)進行控制。
8.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述箱體(1)上還轉動安裝有旋轉塊(13),所述旋轉塊(13)與所述聯動桿(4)之間固定連接,所述旋轉塊(13)上還開設有用于驅動塊(8)貫穿的圓形孔。
9.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述驅動塊(8)采用矩形柱狀結構,且所述支撐架(14)上還開設有用于配合所述驅動塊(8)使用的矩形孔。
10.根據權利要求1所述的復雜空間曲線焊縫的自動化焊接設備,其特征在于,所述聯動桿(4)與所述支撐板(5)和所述支撐環(22)之間均采用固定連接,所述聯動桿(4)在所述支撐環(22)上對稱設置兩組,且所述聯動桿(4)為可伸縮型結構。
技術總結
本發明涉及自動化焊接技術領域,且公開了復雜空間曲線焊縫的自動化焊接設備,包括箱體、機械臂以及焊接模塊,所述機械臂與所述箱體之間通過調節組件連接,所述機械臂上活動安裝有連接桿,且連接桿上還安裝有轉動電機,所述轉動電機上轉動安裝有控制盒,所述焊接模塊安裝固定在所述控制盒上,且控制盒上還至少設置有一組用于對焊縫進行識別的視覺傳感器,所述調節組件包括支撐臺、立板、聯動桿以及支撐板,所述箱體內還安裝有用于帶動所述支撐環轉動的驅動組件;本發明,通過設置的調節組件、機械臂以及視覺傳感器的配合使用,實現設備對復雜空間曲線焊縫的自動化精準焊接。
技術研發人員:李博,邵蕾,蔣晉,黃敏,仇海龍,陳遠洪
受保護的技術使用者:宏華海洋油氣裝備(江蘇)有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!