一種具有調節功能的機器人用萬用夾具的制作方法
本技術涉及機器人輔助設備,具體為一種具有調節功能的機器人用萬用夾具。
背景技術:
1、機器人是一種能夠半自主或全自主工作的智能機器,機器人具有感知、決策、執行等基本特征,可以輔助甚至替代人類完成危險、繁重、復雜的工作,提高工作效率與質量,在機器人使用過程中需要安裝專用夾具使其能對物體進行夾持。
2、根據申請號為202221789229.4的一種工業機器人用復合夾具,該方案中通過設置有第二電機、第二螺紋桿、連接箱等,通過第二電機動能帶動第二螺紋桿轉動,利用第一滑塊與第二螺紋桿螺紋連接,使其第一滑塊帶動下方連接箱水平移動,再通過第二電動推桿作用,推動連接箱做上下移動,方便了復合夾具對所需物體的夾取效果,能夠快速的使夾具移動到所需工作地點。
3、但在實際使用過程中依然存在以下問題:
4、(1)該種工業機器人用復合夾具,不能夠合理的對不同外形的物體進行夾持,會造成該裝置只能對表面規則的物體進行夾持,不能夠合理的滿足不同的使用需求,使得該裝置具有局限性也增加了相應的調試時間。
5、(2)該種工業機器人用復合夾具,無法便于對該裝置進行安裝,由于該裝置在使用時需要外部電源進行能源供應,需要對其進行安裝,加大了該裝置的安裝難度也會增加相應的安裝時間。
技術實現思路
1、針對現有技術的不足,本實用新型提供了一種具有調節功能的機器人用萬用夾具,具備能夠對不同外形的物體進行夾持和便于與外部設備組裝的優點,解決了背景技術中提出的問題。
2、本實用新型提供如下技術方案:一種具有調節功能的機器人用萬用夾具,包括固定板,所述固定板的內部滑動連接有兩組滑塊,兩組所述滑塊的下方均設置有調節機構,所述調節機構中包括第二鉸接座、轉動塊、第二伺服電機、轉動桿、電動伸縮桿和固定塊,所述第二鉸接座與滑塊固定連接,所述第二伺服電機與第二鉸接座固定連接,所述第二伺服電機的輸出軸與轉動桿固定連接,所述轉動桿與第二鉸接座轉動連接,所述轉動塊與轉動桿固定連接,所述轉動塊與第二鉸接座貼合,所述電動伸縮桿與轉動塊固定連接,所述電動伸縮桿的輸出端與固定塊固定連接。
3、優選的,所述固定板的上表面設置有固定機構,所述固定機構中包括第一鉸接座、l型塊和預留孔,所述第一鉸接座與固定板固定連接,所述l型塊與第一鉸接座轉動連接,所述l型塊與固定板貼合。
4、優選的,所述固定板的一側固定安裝有第一伺服電機,所述第一伺服電機的輸出軸上固定連接有雙向螺紋桿,所述雙向螺紋桿與固定板轉動連接,所述雙向螺紋桿與滑塊螺紋連接,可以達到對夾具間距進行調節的效果,提高了該裝置的實用性。
5、優選的,所述固定塊的內部固定安裝有第三伺服電機,所述第三伺服電機的輸出軸上固定連接有連接桿,所述連接桿與固定塊轉動連接,所述連接桿的下端固定連接有承接圓盤。
6、優選的,所述承接圓盤的內部卡接有四組卡塊,四組所述卡塊的上表面均固定連接有夾具,所述夾具與承接圓盤貼合,可以達到對夾具進行更換的效果,提高了該裝置的使用壽命。
7、優選的,所述固定板的上表面固定連接有限位塊,所述限位塊的上表面與l型塊的上表面位于同一水平面。
8、與現有技術對比,本實用新型具備以下有益效果:
9、1、該種具有調節功能的機器人用萬用夾具,對該裝置進行夾持時,首先,啟動第三伺服電機,通過第三伺服電機帶動連接桿進行轉動,根據物體外形將對應的夾具轉動到待夾持物體一側,啟動第二伺服電機,通過第二伺服電機帶動轉動桿進行轉動,使得轉動塊以轉動桿為圓心進行偏轉,從而將兩組承接圓盤調整到待夾持物體的兩側,啟動電動伸縮桿,通過電動伸縮桿帶動固定塊和承接圓盤進行垂直移動,使得對應的兩組夾具與待夾持物體位于同一水平面,啟動第一伺服電機,通過第一伺服電機帶動雙向螺紋桿進行轉動,使得雙向螺紋桿表面螺紋連接的兩組滑塊沿著固定板的內壁進行反向水平移動,從而帶動兩組承接圓盤和夾具進行方向水平移動,使得夾具與待夾持物體表面貼合,從而對其進行夾持,該結構的設置,有效避免了單一夾具無法適用于不同物體的問題,可以達到滿足不同夾持需求的效果,同時,減少了調試所需的時間,提高了相應的工作效率,也可以在實際使用的過程中提高該裝置的實用性,也利于該裝置的廣泛推廣。
10、2、該種具有調節功能的機器人用萬用夾具,對該裝置進行安裝時,首先,將限位塊滑動到外接設備內,使得固定板與外接設備貼合,若外接設備不支持時,拉動l型塊,使得l型塊以第一鉸接座為圓心進行偏轉,使得l型塊內部開設的預留孔與外界設備的預留孔貼合,通過螺絲對其固定,使得固定板與外接設備緊密貼合,該結構的設置,有效避免了該裝置安裝復雜的問題,可以達到便于工作人員組裝的效果,同時,降低了工作人員的安裝難度,減少了安裝所需的時間,提高了相應的安裝效率,也可以在實際使用的過程中提高該裝置的適應性。
技術特征:
1.一種具有調節功能的機器人用萬用夾具,包括固定板(1),其特征在于:所述固定板(1)的內部滑動連接有兩組滑塊(8),兩組所述滑塊(8)的下方均設置有調節機構(21),所述調節機構(21)中包括第二鉸接座(16)、轉動塊(15)、第二伺服電機(11)、轉動桿(10)、電動伸縮桿(12)和固定塊(13),所述第二鉸接座(16)與滑塊(8)固定連接,所述第二伺服電機(11)與第二鉸接座(16)固定連接,所述第二伺服電機(11)的輸出軸與轉動桿(10)固定連接,所述轉動桿(10)與第二鉸接座(16)轉動連接,所述轉動塊(15)與轉動桿(10)固定連接,所述轉動塊(15)與第二鉸接座(16)貼合,所述電動伸縮桿(12)與轉動塊(15)固定連接,所述電動伸縮桿(12)的輸出端與固定塊(13)固定連接。
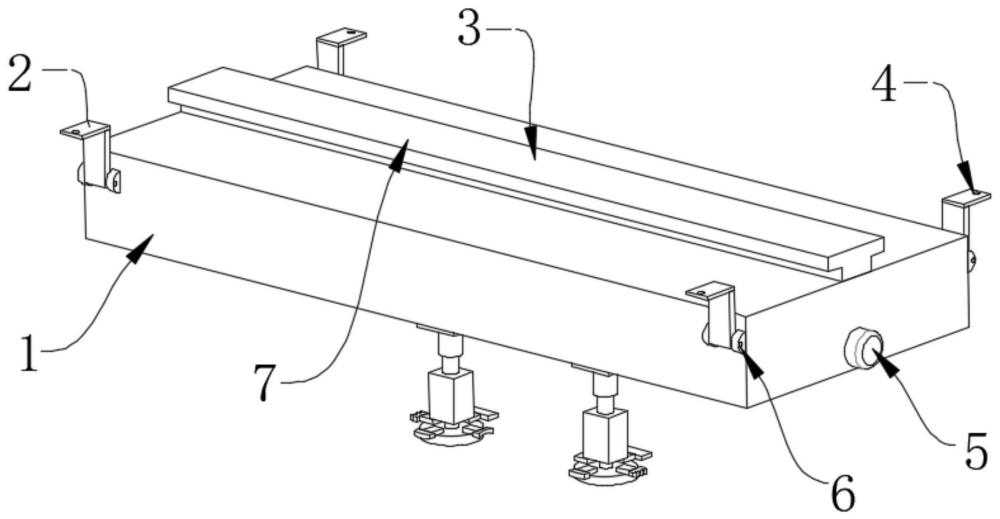
2.根據權利要求1所述的一種具有調節功能的機器人用萬用夾具,其特征在于:所述固定板(1)的上表面設置有固定機構(7),所述固定機構(7)中包括第一鉸接座(6)、l型塊(2)和預留孔(4),所述第一鉸接座(6)與固定板(1)固定連接,所述l型塊(2)與第一鉸接座(6)轉動連接,所述l型塊(2)與固定板(1)貼合。
3.根據權利要求1所述的一種具有調節功能的機器人用萬用夾具,其特征在于:所述固定板(1)的一側固定安裝有第一伺服電機(5),所述第一伺服電機(5)的輸出軸上固定連接有雙向螺紋桿(9),所述雙向螺紋桿(9)與固定板(1)轉動連接,所述雙向螺紋桿(9)與滑塊(8)螺紋連接。
4.根據權利要求1所述的一種具有調節功能的機器人用萬用夾具,其特征在于:所述固定塊(13)的內部固定安裝有第三伺服電機(20),所述第三伺服電機(20)的輸出軸上固定連接有連接桿(17),所述連接桿(17)與固定塊(13)轉動連接,所述連接桿(17)的下端固定連接有承接圓盤(14)。
5.根據權利要求4所述的一種具有調節功能的機器人用萬用夾具,其特征在于:所述承接圓盤(14)的內部卡接有四組卡塊(18),四組所述卡塊(18)的上表面均固定連接有夾具(19),所述夾具(19)與承接圓盤(14)貼合。
6.根據權利要求1所述的一種具有調節功能的機器人用萬用夾具,其特征在于:所述固定板(1)的上表面固定連接有限位塊(3),所述限位塊(3)的上表面與l型塊(2)的上表面位于同一水平面。
技術總結
本技術涉及機器人輔助設備技術領域,且公開了一種具有調節功能的機器人用萬用夾具,包括固定板,所述固定板的內部滑動連接有兩組滑塊,兩組所述滑塊的下方均設置有調節機構,所述調節機構中包括第二鉸接座、轉動塊、第二伺服電機、轉動桿、電動伸縮桿和固定塊。該種具有調節功能的機器人用萬用夾具,對該裝置進行夾持時,首先,啟動第三伺服電機,通過第三伺服電機帶動連接桿進行轉動,該結構的設置,有效避免了單一夾具無法適用于不同物體的問題,可以達到滿足不同夾持需求的效果,同時,減少了調試所需的時間,提高了相應的工作效率,也可以在實際使用的過程中提高該裝置的實用性,也利于該裝置的廣泛推廣。
技術研發人員:史延俊,寧衍妮,劉鄧,劉繼軍
受保護的技術使用者:山東九眾九機器人有限公司
技術研發日:20240301
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!