一種工業機器人的抓取結構
本技術涉及工業機器人,尤其涉及一種工業機器人的抓取結構。
背景技術:
1、工業機器人是廣泛用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能。工業機器人被廣泛應用于電子、物流、化工等各個工業領域之中。
2、對比申請號202123376869.0?工業機器人的抓取結構,包括機械臂和抓取機構,抓取機構安裝在機械臂上,其特征在于:所述的抓取機構包括氣缸、固定板、移動板和抓取手指;氣缸的缸身固定安裝在機械臂上;固定板固定安裝在氣缸的缸身上;移動板安裝在氣缸的輸出軸上;抓取手指包括支撐板、抓取板、彈簧軸、彈簧和夾板;支撐板的內端鉸接安裝在固定板上;抓取板的內端鉸接安裝在移動板上,中部鉸接安裝在支撐板的外端;彈簧軸滑動安裝在抓取板的外端;夾板固定安裝在彈簧軸上;彈簧套裝在彈簧軸上,其一端與夾板連接,另一端與抓取板連接,柔性度好,特別適合硅膠制品、食品半成品等比較軟的工件,抓取時不會夾壞這些工件。
3、該業機器人的抓取結構,這樣設置柔性度好,特別適合硅膠制品、食品半成品等比較軟的工件,抓取時不會夾壞這些工件,但是抓取機構在經過長時間的使用時機械夾爪與產品貼合接觸的面,長時間的使用導致機械夾爪的使用壽命,不便于對長時間使用的機械夾爪進行更換。
技術實現思路
1、為解決上述的技術問題,本實用新型提供一種工業機器人的抓取結構。
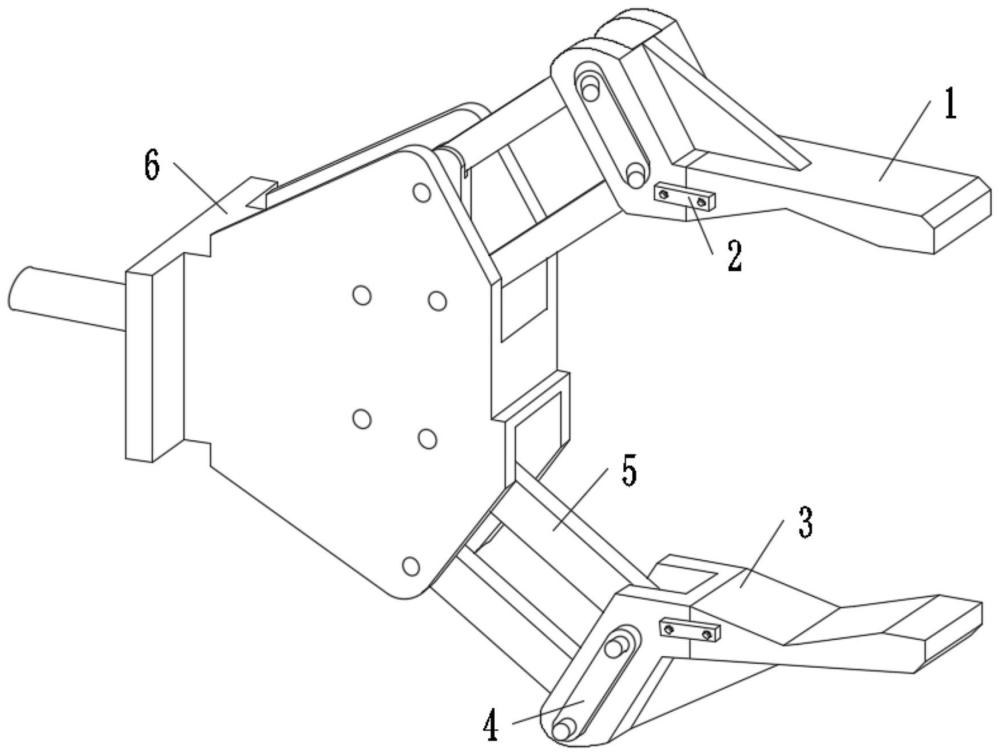
2、本實用新型采用以下技術方案實現:一種工業機器人的抓取結構,包括夾抓主體和連接桿,所述夾抓主體的左端插接有連接件,所述夾抓主體的正面螺紋連接有固定板,所述夾抓主體的正面螺紋連接有連接板,所述連接件的內部固定連接有第一傳動桿,所述第一傳動桿的表面固定連接有第一轉動板,所述第一轉動板的內部固定連接有第二傳動桿,所述第二傳動桿的表面固定連接有支撐桿,所述支撐桿的表面固定連接有主體外殼,所述主體外殼的內部開設有轉動槽,所述夾抓主體的內部開設有安裝槽,所述連接件的右側固定連接有定位板,所述連接件的右端開設有安裝孔。
3、通過上述技術方案,夾抓主體和連接件的數量設置為兩個,便于通過若干個部件進行固定和安裝。
4、作為上述方案的進一步改進,所述安裝孔以連接件為中心對稱分布,所述連接桿以夾抓主體為中心對稱分布,所述連接桿位于安裝孔的內部,所述定位板位于安裝槽的內部。
5、作為上述方案的進一步改進,所述第一轉動板位于轉動槽的內部,所述第二傳動桿位于轉動槽的內部,所述第一傳動桿位于轉動槽的內部。
6、通過上述技術方案,第二傳動桿和第一傳動桿的數量設置為兩個,便于對設備的整體通過若干個配件進行聯動。
7、作為上述方案的進一步改進,所述第二傳動桿以支撐桿為中心對稱分布,所述第一轉動板以支撐桿為中心對稱分布。
8、作為上述方案的進一步改進,所述支撐桿貫穿主體外殼延伸至左端,所述固定板位于連接件的正面,所述固定板以夾抓主體為中心對稱分布。
9、作為上述方案的進一步改進,所述固定板以支撐桿為中心對稱分布。
10、通過上述技術方案,固定板的數量設置為兩個,便于對連接件和夾抓主體進行固定和限位。
11、作為上述方案的進一步改進,所述夾抓主體以支撐桿為中心對稱分布。
12、相比現有技術,本實用新型的有益效果在于:
13、本實用新型通過夾抓主體設置安裝槽便于對連接件右端的定位板進行安裝和固定,通過設置安裝孔和連接桿便于對夾抓主體和連接件進行連接時穩定性,便于長時間使用的夾抓主體進行安裝和拆卸,避免夾抓主體長時間的使用減少對產品夾持的穩定性,為工作人員對長時間使用的夾抓主體進行安裝和拆卸帶來了便捷性。
14、本實用新型通過支撐桿設置內部的第二傳動桿來帶動第一轉動板和第一傳動桿來傳動夾抓主體和連接件進行轉動來對產品進行夾持,通過主體外殼設置內部的轉動槽便于對內部聯動的組件帶來了驅動的空間。
技術特征:
1.一種工業機器人的抓取結構,其特征在于,包括夾抓主體(1)和連接桿(12),所述夾抓主體(1)的左端插接有連接件(3),所述夾抓主體(1)的正面螺紋連接有固定板(2),所述夾抓主體(1)的正面螺紋連接有連接板(4),所述連接件(3)的內部固定連接有第一傳動桿(5),所述第一傳動桿(5)的表面固定連接有第一轉動板(7),所述第一轉動板(7)的內部固定連接有第二傳動桿(8),所述第二傳動桿(8)的表面固定連接有支撐桿(9),所述支撐桿(9)的表面固定連接有主體外殼(6),所述主體外殼(6)的內部開設有轉動槽(10),所述夾抓主體(1)的內部開設有安裝槽(11),所述連接件(3)的右側固定連接有定位板(13),所述連接件(3)的右端開設有安裝孔(14)。
2.如權利要求1所述的一種工業機器人的抓取結構,其特征在于:所述安裝孔(14)以連接件(3)為中心對稱分布,所述連接桿(12)以夾抓主體(1)為中心對稱分布,所述連接桿(12)位于安裝孔(14)的內部,所述定位板(13)位于安裝槽(11)的內部。
3.如權利要求1所述的一種工業機器人的抓取結構,其特征在于:所述第一轉動板(7)位于轉動槽(10)的內部,所述第二傳動桿(8)位于轉動槽(10)的內部,所述第一傳動桿(5)位于轉動槽(10)的內部。
4.如權利要求1所述的一種工業機器人的抓取結構,其特征在于:所述第二傳動桿(8)以支撐桿(9)為中心對稱分布,所述第一轉動板(7)以支撐桿(9)為中心對稱分布。
5.如權利要求1所述的一種工業機器人的抓取結構,其特征在于:所述支撐桿(9)貫穿主體外殼(6)延伸至左端,所述固定板(2)位于連接件(3)的正面,所述固定板(2)以夾抓主體(1)為中心對稱分布。
6.如權利要求1所述的一種工業機器人的抓取結構,其特征在于:所述固定板(2)以支撐桿(9)為中心對稱分布。
7.如權利要求1所述的一種工業機器人的抓取結構,其特征在于:所述夾抓主體(1)以支撐桿(9)為中心對稱分布。
技術總結
本技術涉及工業機器人技術領域,公開了一種工業機器人的抓取結構,包括夾抓主體和連接桿,所述夾抓主體的左端插接有連接件,所述夾抓主體的正面螺紋連接有固定板,所述夾抓主體的正面螺紋連接有連接板,所述連接件的內部固定連接有第一傳動桿,所述第一傳動桿的表面固定連接有第一轉動板,所述第一轉動板的內部固定連接有第二傳動桿。本技術通過夾抓主體設置安裝槽便于對連接件右端的定位板進行安裝和固定,通過設置安裝孔和連接桿便于對夾抓主體和連接件進行連接時穩定性,便于長時間使用的夾抓主體進行安裝和拆卸,避免夾抓主體長時間的使用減少對產品夾持的穩定性,為工作人員對長時間使用的夾抓主體進行安裝和拆卸帶來了便捷性。
技術研發人員:梁雨鳳
受保護的技術使用者:江西制造職業技術學院
技術研發日:20240123
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!