一種動火作業用輔助機器人的制作方法
本發明涉及工程作業輔助設備技術,具體涉及一種動火作業用輔助機器人。
背景技術:
1、建筑工地的動火作業,是指在禁火區進行焊接與切割作業及在易燃易爆場所使用噴燈、電鉆、砂輪等可能產生火花、火焰和熾熱表面的臨時性作業。動火作業是高危險作業,為確保動火作業施工過程中的安全,主要是通過配備安全員對施工作業人員在施工作業全過程進行不間斷無死角現場確認和安全監護,避免安全事故發生。然而,安全員在現場監控時可能存在失職或者違規的可能性,容易出現誤判或者漏判等風險。
2、公開號為cn113500596a的中國發明專利中,公開了動火作業輔助機器人系統及其監控方法,該動火作業輔助機器人系統及其監控方法,通過動火ai機器人監控動火作業區域并在本地執行ai檢測,以對動火作業區域進行自動監測,判斷施工作業人員是否存在違規或者安全風險。無需在動火作業區域配置安全員進行人工監測,從而降低了人工成本,避免了將檢測數據上傳給管控服務器的傳輸過程中數據安全隱私泄露的風險,提高檢測數據的安全性。即檢測原始數據無需傳輸出動火ai機器人監控區域所在的工地,有效保障了安全檢測的實時性,以及數據的安全隱私。動火ai機器人可以根據工地動火作業的實際位置來靈活動態部署,有效屏蔽無關的場景,來提高ai檢測的精確度,達到智能工地的實際有效管理要求;通過網絡對動火ai機器人進行遠程管理、功能配置和ai模型部署,實現對動火ai機器人的初始化配置,然后動火ai機器人根據ai模型基于ai算法對監控區域內的圖像信息進行計算分析,以判斷動火作業區域內的施工作業人員是否存在違規或安全風險。不會出現安全員現場監控時存在失職或者違規導致的誤判或者漏判斷的情況,從而提高了監測效率和監控質量,保障了動火作業區域的安全。
3、在動火作業過程中,當出現異常狀況時,無法將重物或危險材料搬移至外部,導致作業現場造成損壞,增加事故風險的概率,并且影響后續人工繼續操作,同時工作人員無法長時間的在存有有害氣體或高溫的環境下作業,從而使得整體作業效率大大降低,進而開發了一種動火作業用輔助機器人。
技術實現思路
1、本發明的目的是提供一種動火作業用輔助機器人,以解決現有技術中的上述不足之處。
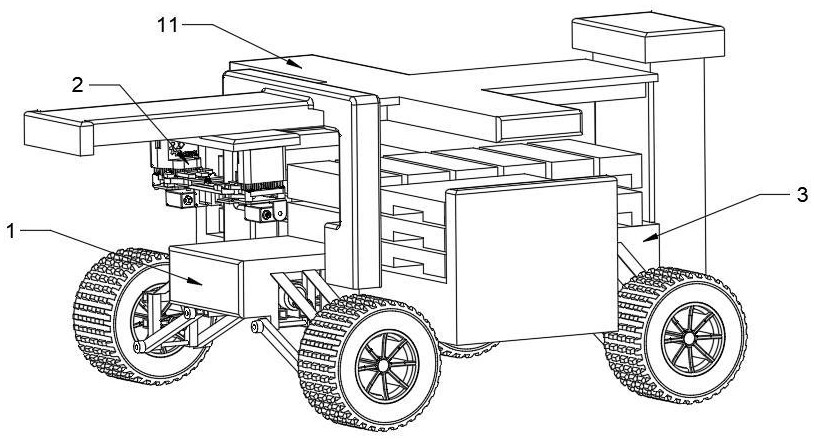
2、為了實現上述目的,本發明提供如下技術方案:一種動火作業用輔助機器人,包括基座,所述基座的上端設置有導向板,且所述導向板的下端滑動安裝有搬運組件,通過所述搬運組件對危險物件進行搬運;
3、其中,所述搬運組件包括與所述導向板滑動連接的連接板,所述連接板下端的兩側均設置有動力件,所述動力件的輸出端設置有第一齒輪,同時所述動力件輸出端的一側轉動安裝有第二齒輪,所述第一齒輪的外表面與所述第二齒輪的外表面相嚙合,所述第一齒輪與所述第二齒輪的下端設置有固定板;
4、所述第一齒輪與所述第二齒輪的外表面均設置有動力桿,兩個所述動力桿遠離所述第一齒輪與所述第二齒輪的一端均轉動安裝有推板,且所述推板遠離所述動力桿的一端設置有伸縮件;
5、所述第一齒輪與所述第二齒輪的下端且位于所述固定板的上端設置有定位板,同時所述定位板的上端且位于所述第一齒輪的一側轉動安裝有限位桿,所述限位桿遠離所述定位板的一端與所述推板的一側轉動連接;
6、所述伸縮件的下端設置有夾塊,且所述夾塊的一側設置有固定塊,所述固定塊的端部設置有按壓板,所述固定塊的一側滑動安裝有定位筒,所述按壓板的端部設置有卡接板,所述卡接板與所述定位筒之間設置有彈性件;
7、調節組件,其裝配于所述基座的末端,通過所述調節組件調整所述基座上物件重心位置。
8、作為本發明的進一步優化方案,所述基座的下端設置有驅動設備,通過所述驅動設備驅使所述基座進行移動。
9、作為本發明的進一步優化方案,所述調節組件包括與所述基座內腔連接的底板,所述底板上端的中間位置設置有驅動件。
10、作為本發明的進一步優化方案,所述底板上端的兩側均設置有支撐柱,兩個所述支撐柱的上端均滑動安裝有調節板,且所述調節板的兩端延伸至所述支撐柱的外部。
11、作為本發明的進一步優化方案,兩個所述調節板之間設置有防護塊,且所述防護塊的橫截面呈方形,同時所述防護塊的一端開設有活動槽。
12、作為本發明的進一步優化方案,所述活動槽的內壁滑動安裝有活動板,所述活動板的端部設置有多組凸塊,且多組所述凸塊均勻分布于所述活動板的端部。
13、作為本發明的進一步優化方案,所述活動板的端部且位于所述凸塊的兩側設置有弧形板。
14、作為本發明的進一步優化方案,所述驅動件的輸出端設置有驅動齒輪,所述驅動齒輪的外表面與所述凸塊的外表面相嚙合。
15、作為本發明的進一步優化方案,所述調節板的上端設置有支撐板,且所述支撐板的端部與所述活動板的端部滑動連接。
16、作為本發明的進一步優化方案,所述支撐板的上端貫穿并延伸至所述基座的上端。
17、與現有技術相比,本發明提供的一種動火作業用輔助機器人,具備以下有益效果:當需要對物件進行提取時,通過定位筒先一步與物件貼合,并在緩慢合并時,拉動彈性件,其中彈性件為彈簧等具有彈性的部件,并在定位筒移動時,使得卡接板緩慢與物件貼合,進而對物件進一步的固定,卡接板的外表面設置有橡膠等具有防滑作用的部件,使得在對物件進行固定時,不會產生滑動,通過自動化搬運,減少了人工操作過程中可能出現的錯誤和意外,提升了整體作業安全性,同時機器人可以在危險環境中操作,從而減少人工暴露于有害氣體、高溫、火焰等危險因素中,降低工傷風險,機器人能夠進行高精度的搬運操作,這在處理重物和危險材料時尤為重要,有助于提高作業的質量和一致性。
18、當驅動件啟動時,帶動驅動齒輪進行轉動,由于驅動齒輪的外表面與凸塊的外表面相嚙合,使得在驅動齒輪轉動時,活動板在活動槽的內壁進行往復移動,同時帶動活動板進行移動,從而同步帶動防護塊與調節板進行運動,并使得處于支撐板上的負重位置進行調整,從而使整個基座處于平衡狀態,保證整體在對危險物件進行搬運時的安全性。
技術特征:
1.一種動火作業用輔助機器人,其特征在于,包括基座(1),所述基座(1)的上端設置有導向板(11),且所述導向板(11)的下端滑動安裝有搬運組件(2),通過所述搬運組件(2)對危險物件進行搬運;
2.根據權利要求1所述的一種動火作業用輔助機器人,其特征在于,所述基座(1)的下端設置有驅動設備(12),通過所述驅動設備(12)驅使所述基座(1)進行移動。
3.根據權利要求1所述的一種動火作業用輔助機器人,其特征在于,所述調節組件(3)包括與所述基座(1)內腔連接的底板(31),所述底板(31)上端的中間位置設置有驅動件(32)。
4.根據權利要求3所述的一種動火作業用輔助機器人,其特征在于,所述底板(31)上端的兩側均設置有支撐柱(33),兩個所述支撐柱(33)的上端均滑動安裝有調節板(36),且所述調節板(36)的兩端延伸至所述支撐柱(33)的外部。
5.根據權利要求4所述的一種動火作業用輔助機器人,其特征在于,兩個所述調節板(36)之間設置有防護塊(361),且所述防護塊(361)的橫截面呈方形,同時所述防護塊(361)的一端開設有活動槽(362)。
6.根據權利要求5所述的一種動火作業用輔助機器人,其特征在于,所述活動槽(362)的內壁滑動安裝有活動板(35),所述活動板(35)的端部設置有多組凸塊(351),且多組所述凸塊(351)均勻分布于所述活動板(35)的端部。
7.根據權利要求6所述的一種動火作業用輔助機器人,其特征在于,所述活動板(35)的端部且位于所述凸塊(351)的兩側設置有弧形板(352)。
8.根據權利要求7所述的一種動火作業用輔助機器人,其特征在于,所述驅動件(32)的輸出端設置有驅動齒輪(34),所述驅動齒輪(34)的外表面與所述凸塊(351)的外表面相嚙合。
9.根據權利要求8所述的一種動火作業用輔助機器人,其特征在于,所述調節板(36)的上端設置有支撐板(37),且所述支撐板(37)的端部與所述活動板(35)的端部滑動連接。
10.根據權利要求9所述的一種動火作業用輔助機器人,其特征在于,所述支撐板(37)的上端貫穿并延伸至所述基座(1)的上端。
技術總結
本發明公開了一種動火作業用輔助機器人,涉及工程作業輔助設備技術領域,包括基座,所述基座的上端設置有導向板,且所述導向板的下端滑動安裝有搬運組件,通過所述搬運組件對危險物件進行搬運;該動火作業用輔助機器人,通過自動化搬運,減少了人工操作過程中可能出現的錯誤和意外,提升了整體作業安全性,同時機器人可以在危險環境中操作,從而減少人工暴露于有害氣體、高溫、火焰等危險因素中,降低工傷風險,機器人能夠進行高精度的搬運操作,這在處理重物和危險材料時尤為重要,有助于提高作業的質量和一致性。
技術研發人員:王磊,李曉輝,王軍超,牟赟清,許云峰,崔長全,趙文娟,魏麗酈,許佳琳
受保護的技術使用者:中安合順物聯網技術(山東)有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!