機械臂拖動示教方法、裝置、設備、介質和產品與流程
本發明實施例涉及機械臂控制,尤其涉及一種機械臂拖動示教方法、裝置、設備、介質和產品。
背景技術:
1、目前,機械臂拖動示教功能的實現方式主要包括兩種,一種是零力拖動方案,所有關節伺服都處于力矩模式,控制器通過發送力矩指令補償機械臂的重力矩、科氏與向心力矩、摩擦力矩使機械臂在任意時刻都處于懸浮狀態,此時機械臂受到外力即可被推動,從而實現拖動功能。但零力拖動方案無法在拖動過程中約束機械臂末端的姿態。
2、另一種是基于六維力/力矩傳感器或關節力矩傳感器或末端外力估計的拖動方案,該方案中所有關節伺服都處于位置或速度控制模式,控制器通過導納控制的方法將末端外力或關節外力矩轉換為關節加速度,最終通過積分輸出關節位置或關節速度,從而實現拖動功能。該方案雖然在拖動過程中能夠約束機械臂末端的姿態,但在拖動啟動開始階段會存在明顯的時滯問題,并且在約束機械臂末端的笛卡爾空間姿態過程中必然會存在奇異問題,即當遇到或接近奇異點時,用戶無法拖動或笛卡爾空間姿態約束失效。
技術實現思路
1、本發明實施例提供了一種機械臂拖動示教方法、裝置、設備、介質和產品,可以通過對不同關節采取不同控制模式的混合控制方法,在不影響拖動柔順性與快速響應性的情況下,使機械臂末端始終保持預設的姿態的同時避免拖動過程的奇異問題,提高拖動示教的穩定性。
2、第一方面,本發明實施例提供了一種機械臂拖動示教方法,該方法包括:
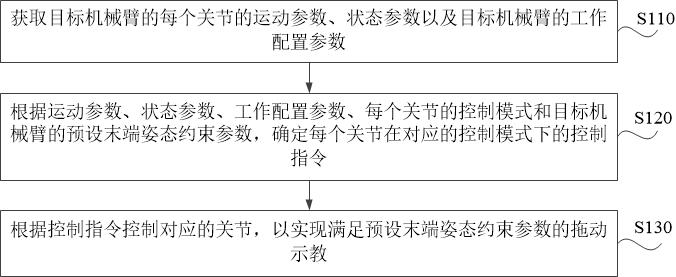
3、獲取目標機械臂的每個關節的運動參數、狀態參數以及目標機械臂的工作配置參數;
4、根據運動參數、狀態參數、工作配置參數、每個關節的控制模式和目標機械臂的預設末端姿態約束參數,確定每個關節在對應的控制模式下的控制指令;
5、根據控制指令控制對應的關節,以實現滿足預設末端姿態約束參數的拖動示教;
6、其中,每個關節的控制模式為位置控制模式、速度控制模式或力矩控制模式,并且每個關節的控制模式不完全相同,至少一個關節的控制模式為力矩控制模式。
7、第二方面,本發明實施例提供了一種機械臂拖動示教裝置,該裝置包括:
8、參數獲取模塊,用于獲取目標機械臂的每個關節的運動參數、狀態參數以及目標機械臂的工作配置參數;
9、控制指令確定模塊,根據運動參數、狀態參數、工作配置參數、每個關節的控制模式和目標機械臂的預設末端姿態約束參數,確定每個關節在對應的控制模式下的控制指令;
10、控制指令輸出模塊,用于根據控制指令控制對應的關節,以實現滿足預設末端姿態約束參數的拖動示教;
11、其中,每個關節的控制模式為位置控制模式、速度控制模式或力矩控制模式,并且每個關節的控制模式不完全相同,至少一個關節的控制模式為力矩控制模式。
12、第三方面,本發明實施例還提供了一種計算機設備,上述計算機設備包括:
13、一個或多個處理器;
14、存儲器,用于存儲一個或多個程序;
15、當上述一個或多個程序被上述一個或多個處理器執行,使得上述一個或多個處理器實現如本發明任意實施例所提供的機械臂拖動示教方法。
16、第四方面,本發明實施例還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現如本發明任意實施例所提供的機械臂拖動示教方法。
17、第五方面,本發明實施例還提供了一種計算機程序產品,包括計算機程序,上述計算機程序在被處理器執行時實現如本發明任意實施例所提供的機械臂拖動示教方法。
18、上述發明中的實施例具有如下優點或有益效果:
19、本發明實施例,通過獲取目標機械臂的每個關節的運動參數、狀態參數以及目標機械臂的工作配置參數;根據運動參數、狀態參數、工作配置參數、每個關節的控制模式和目標機械臂的預設末端姿態約束參數,確定每個關節在對應的控制模式下的控制指令;根據控制指令控制對應的關節,以實現滿足預設末端姿態約束參數的拖動示教;其中,每個關節的控制模式為位置控制模式、速度控制模式或力矩控制模式,并且每個關節的控制模式不完全相同,至少一個關節的控制模式為力矩控制模式。本發明實施例的技術方案解決了現有技術中機械臂拖動示教不能控制末端姿態,或能夠控制末端姿態的情況下產生拖動啟動的時滯現象和拖動過程中奇異失效的問題,可以通過對不同關節采取不同控制模式的混合控制方法,在不影響拖動柔順性與快速響應性的情況下,使機械臂末端始終保持預設的姿態的同時避免拖動過程的奇異問題,提高拖動示教的穩定性。
技術特征:
1.一種機械臂拖動示教方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述方法還包括:
3.根據權利要求1所述的方法,其特征在于,所述根據所述運動參數、所述狀態參數、所述工作配置參數、每個所述關節的控制模式和所述目標機械臂的預設末端姿態約束參數,確定每個所述關節在對應的控制模式下的控制指令,包括:
4.根據權利要求3所述的方法,其特征在于,所述根據每個所述力矩值確定處于所述力矩控制模式下的所述關節的力矩控制指令,包括:
5.根據權利要求1所述的方法,其特征在于,所述根據所述控制指令控制對應的所述關節,包括:
6.根據權利要求1-5中任一所述的方法,其特征在于,所述目標機械臂為五軸機械臂,所述五軸機械臂包括五個所述關節。
7.一種機械臂拖動示教裝置,其特征在于,包括:
8.一種計算機設備,其特征在于,所述計算機設備包括:
9.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,該程序被處理器執行時實現如權利要求1-6中任一所述的機械臂拖動示教方法。
10.一種計算機程序產品,包括計算機程序,其特征在于,所述計算機程序在被處理器執行時實現如權利要求1-6中任一所述的機械臂拖動示教方法。
技術總結
本發明實施例公開了一種機械臂拖動示教方法、裝置、設備、介質和產品,其中,方法包括:根據運動參數、控制模式和預設末端姿態約束參數,確定每個關節的控制指令,實現滿足預設末端姿態約束參數的拖動示教;其中,每個關節的控制模式為位置、速度或力矩控制模式,每個關節的控制模式不完全相同,至少一個關節為力矩控制模式。本發明實施例的技術方案解決了現有技術中機械臂拖動示教不能控制末端姿態,或能夠控制末端姿態的情況下產生拖動啟動的時滯現象和拖動過程中奇異失效的問題,可以通過混合控制方法,在不影響拖動柔順性與快速響應性的情況下,使機械臂末端始終保持預設的姿態的同時避免拖動過程的奇異問題,提高拖動示教的穩定性。
技術研發人員:王珂,孫愷,曹宇男
受保護的技術使用者:蘇州艾利特機器人有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!