機器人巡檢方法及裝置、電子設備、可讀存儲介質與流程
本公開屬于機器人,更具體地說,是涉及一種機器人巡檢方法及裝置、電子設備、可讀存儲介質。
背景技術:
1、隨著科技的不斷發展,對設備和環境的監測需求日益增長,傳統人工巡檢方式逐漸暴露出諸多不足,例如,人工巡檢效率低下,需耗費大量時間在不同巡檢點之間奔波,對于大規模區域,巡檢周期長,難以及時發現問題。同時,準確性受人為因素影響大,巡檢人員可能因疲勞、注意力不集中等出現漏檢或誤檢。機器人可以用于自動完成對各種環境和設備的巡檢任務,但是對于復雜環境的適應能力有待提高,存在巡檢效率低的問題。
技術實現思路
1、本公開的目的在于提供一種機器人巡檢方法及裝置、電子設備、可讀存儲介質,以提高巡檢效率。
2、本公開實施例的第一方面,提供了一種機器人巡檢方法,包括:
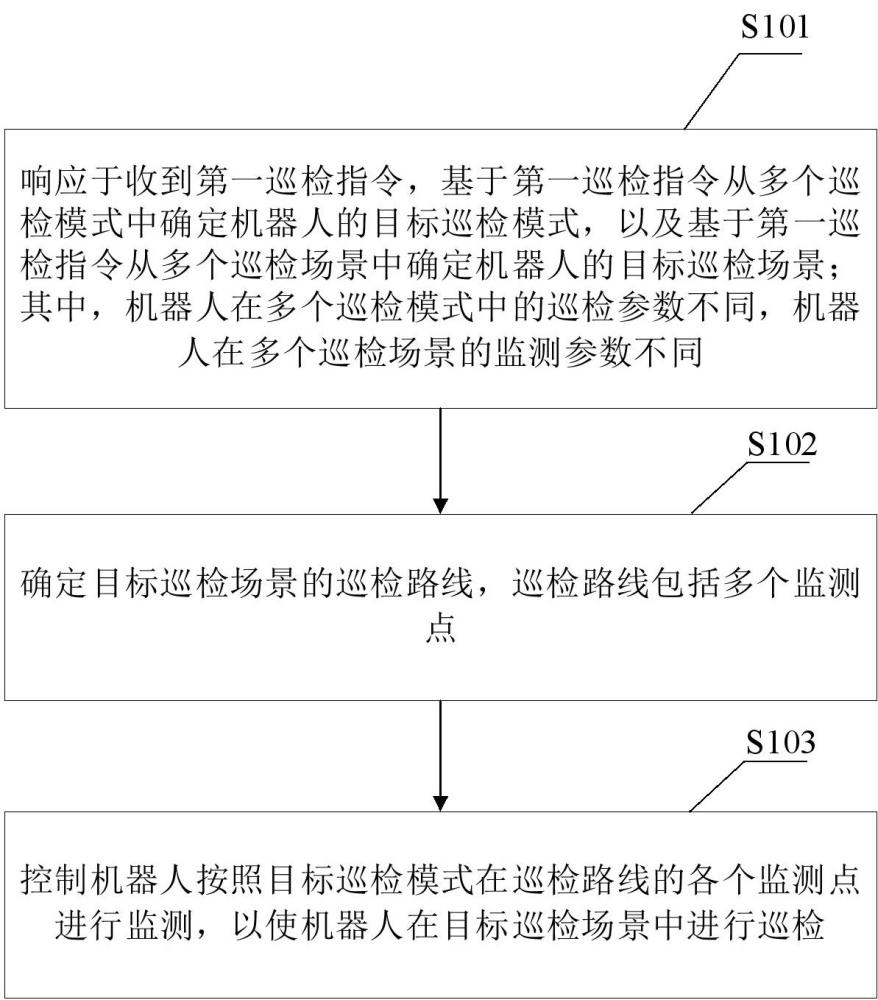
3、響應于收到第一巡檢指令,基于所述第一巡檢指令從多個巡檢模式中確定機器人的目標巡檢模式,以及基于所述第一巡檢指令從多個巡檢場景中確定機器人的目標巡檢場景;其中,所述機器人在所述多個巡檢模式中的巡檢參數不同,所述機器人在所述多個巡檢場景的監測參數不同;
4、確定所述目標巡檢場景的巡檢路線,所述巡檢路線包括多個監測點;
5、控制所述機器人按照所述目標巡檢模式在所述巡檢路線的各個監測點進行監測,以使所述機器人在所述目標巡檢場景中進行巡檢。
6、本公開實施例的第二方面,提供了一種機器人巡檢裝置,包括:
7、巡檢指令模塊,用于響應于收到第一巡檢指令,基于所述第一巡檢指令從多個巡檢模式中確定機器人的目標巡檢模式,以及基于所述第一巡檢指令從多個巡檢場景中確定機器人的目標巡檢場景;其中,所述機器人在所述多個巡檢模式中的巡檢參數不同,所述機器人在所述多個巡檢場景的監測參數不同;
8、巡檢路線模塊,用于確定所述目標巡檢場景的巡檢路線,所述巡檢路線包括多個監測點;
9、巡檢執行模塊,用于控制所述機器人按照所述目標巡檢模式在所述巡檢路線的各個監測點進行監測,以使所述機器人在所述目標巡檢場景中進行巡檢。
10、本公開實施例的第三方面,提供了一種電子設備,包括存儲器、處理器以及存儲在所述存儲器中并在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現上述的機器人巡檢方法的步驟。
11、本公開實施例的第四方面,提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有計算機程序,所述計算機程序被處理器執行時實現上述的機器人巡檢方法的步驟。
12、本公開實施例提供的機器人巡檢方法及裝置的有益效果在于:
13、本公開實施例提升了機器人巡檢工作的穩定性,為各類巡檢需求提供了高效、精準的解決方案。一方面,根據具體需求動態選擇巡檢模式,確保了機器人能夠以最合適的參數執行任務,提高了巡檢效率與準確性。另一方面,針對多樣化的巡檢場景定制監測參數與巡檢路線,確保了監測的全面性與針對性,有效避免了資源的浪費與盲區的遺漏。
技術特征:
1.一種機器人巡檢方法,其特征在于,包括:
2.如權利要求1所述的機器人巡檢方法,其特征在于,還包括:
3.如權利要求1所述的機器人巡檢方法,其特征在于,所述第一巡檢指令包括巡檢等級;
4.如權利要求1所述的機器人巡檢方法,其特征在于,所述機器人內置有多個標準場景,所述巡檢方法還包括:
5.如權利要求4所述的機器人巡檢方法,其特征在于,所述將目標場景分別與所述多個標準場景進行場景融合,得到所述多個巡檢場景,包括:
6.如權利要求5所述的機器人巡檢方法,其特征在于,所述將所述第一特征集和所述第二特征集進行特征融合,得到第三特征集,包括:
7.如權利要求2所述的機器人巡檢方法,其特征在于,還包括:
8.一種機器人巡檢裝置,其特征在于,包括:
9.一種電子設備,包括存儲器、處理器以及存儲在所述存儲器中并在所述處理器上運行的計算機程序,其特征在于,所述處理器執行所述計算機程序時實現如權利要求1至7任一項所述方法的步驟。
10.一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現如權利要求1至7任一項所述方法的步驟。
技術總結
本公開提供了一種機器人巡檢方法及裝置、電子設備、可讀存儲介質,屬于機器人技術領域,該方法包括:響應于收到第一巡檢指令,基于第一巡檢指令從多個巡檢模式中確定機器人的目標巡檢模式,以及基于第一巡檢指令從多個巡檢場景中確定機器人的目標巡檢場景;其中,機器人在多個巡檢模式中的巡檢參數不同,機器人在多個巡檢場景的監測參數不同;確定目標巡檢場景的巡檢路線,巡檢路線包括多個監測點;控制機器人按照目標巡檢模式在巡檢路線的各個監測點進行監測,以使機器人在目標巡檢場景中進行巡檢。本公開提供的機器人巡檢方法及裝置、電子設備、可讀存儲介質能夠提高機器人巡檢的穩定性和準確性。
技術研發人員:撒興才,田洪偉,張瑞武,李爭,李杰
受保護的技術使用者:北京普龍科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!