一種水下機械臂多功能組合手爪
本發明涉及機械臂,具體是涉及一種水下機械臂多功能組合手爪。
背景技術:
1、機械臂是一種高精度、多輸入多輸出、高度非線性、強耦合的復雜系統,它能夠模仿人類肢體的動作,并根據控制信號自動完成各種任務。
2、在人們開發海洋的過程中,海洋工程裝備得到了不斷的應用,其中,水下機器人的應用范圍也隨之不斷擴大,如管線的精準對接、裝置的維修以及水下礦物的抓取,在這過程中,需要手爪能夠穩定的夾握管線,鉗住線路或撈取石塊狀、碎石狀或黏土狀的不同礦物。
3、目前,水下機械臂手爪只能實現單一功能,在進行不同的操作時,需要更換對應的機械臂手爪,以滿足不同的操作需求,現有的機械臂手爪在進行更換時,需要操作人員使用工具來進行操作,在身邊沒有工具的情況,手爪拆卸和安裝不便,增大了手爪更換的難度,無法實現手爪的快速拆裝,同時,現有的水下機械臂手爪大多只能對直線方向上的物體進行抓取,當物體和裝置之間存在障礙物時,通常需要調節裝置的位置來實現物體的抓取,但是,有時候,裝置的位置調節之后也無法滿足物體抓取操作所需要的條件,這種情況降低了機械臂手爪的適用性。
4、因此,需要提供一種水下機械臂多功能組合手爪,旨在解決上述問題。
技術實現思路
1、針對現有技術存在的不足,本發明實施例的目的在于提供一種水下機械臂多功能組合手爪,以解決上述背景技術中的問題。
2、為實現上述目的,本發明提供如下技術方案:
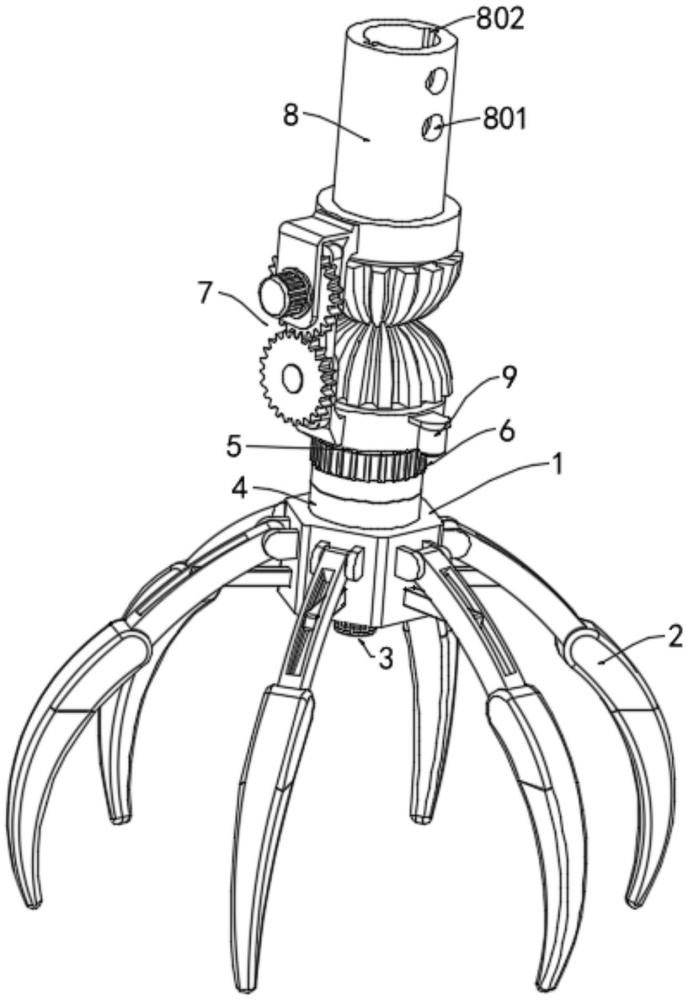
3、一種水下機械臂多功能組合手爪,包括連接架,所述連接架外側周向鉸接有若干個夾爪,所述連接架上設有連接座一,所述連接座一遠離連接架的一端設有連接座二,所述連接座二遠離連接座一的一端活動設有連接筒;
4、抓取組件,所述抓取組件連接于連接架和夾爪之間;
5、連接組件,所述連接組件設于連接座一和連接座二之間;
6、以及角度調節組件,所述角度調節組件設于連接座二和連接筒之間。
7、作為本發明進一步的方案,所述抓取組件包括:
8、滑槽一,所述滑槽一設置于夾爪靠近連接架一端,所述滑槽一的兩側設有側槽;
9、滑桿,所述滑桿設有若干個并周向分布于連接架內,所述滑桿的一端貫穿連接架并與滑槽一滑動配合,所述滑桿靠近滑槽一的一端設有與側槽滑動配合的滑柱一;
10、支撐架,所述支撐架設于連接架內部,所述支撐架上轉動設有轉盤一,所述轉盤一上周向分布有若干個滑槽二,所述滑槽二內滑動設有與滑桿相連接的滑柱二;
11、以及底板,所述底板設于連接架底部,所述底板外側安裝有與轉盤一相連接的電機一。
12、作為本發明進一步的方案,所述連接座二靠近連接架的一端設有連接盤,所述連接座二和連接盤之間連接有連桿,所述連接座一靠近連接座二的一端設有放置槽。
13、作為本發明進一步的方案,所述連接組件包括:
14、旋鈕,所述旋鈕轉動設置于連接座二和連接盤之間,所述旋鈕與連桿轉動連接,所述旋鈕內周向分布有若干個滑槽三,所述滑槽三內滑動設有滑柱三;
15、通槽,所述通槽設有若干個并周向分布于連接盤上,所述通槽內連接有導桿,所述導桿上滑動設有卡接板,所述卡接板與設置于連接座一內部的卡接槽活動配合;
16、以及彈簧,所述彈簧連接于連桿和卡接板之間并套設于導桿外側。
17、作為本發明進一步的方案,所述角度調節組件包括:
18、半球齒輪一,所述半球齒輪一固定設置于連接座二遠離連接盤一端;
19、轉環,所述轉環轉動設于連接座二外側,所述轉環的外端安裝有安裝架一,所述安裝架一上固定連接有固定桿,所述固定桿的外端固定連接有傳動齒輪一;
20、半球齒輪二,所述半球齒輪二轉動設于連接筒靠近連接座二的一端并與半球齒輪一相嚙合,所述半球齒輪二與設置于連接筒內部的電機三相連接;
21、固定環,所述固定環固定設于連接筒外側,所述固定環外側安裝有與安裝架一相對應的安裝架二,所述安裝架二上轉動連接有轉桿,所述轉桿外端連接有與傳動齒輪一相嚙合的傳動齒輪二;
22、連接板,所述連接板活動連接于固定桿和轉桿上并位于傳動齒輪一和安裝架一之間;
23、以及安裝架三,所述安裝架三安裝于安裝架二上,所述安裝架三上安裝有與傳動齒輪二相連接的電機二。
24、作為本發明進一步的方案,所述連接架設為正多邊形塊且連接架的邊數至少為3個。
25、作為本發明進一步的方案,所述夾爪的數量與連接架的邊數一致,所述夾爪為并行夾爪、鉗形夾爪、角形夾爪或斜爪夾爪中的一種。
26、作為本發明進一步的方案,所述連接筒遠離連接架的一端兩端貫穿設有連接孔,所述連接孔內設有連接槽。
27、作為本發明進一步的方案,所述連接座二和連接盤相互靠近的一側均設有環槽,所述旋鈕的兩側分別設有與環槽滑動配合的連接環,所述旋鈕的外側周向分布有若干個凸條。
28、作為本發明進一步的方案,所述半球齒輪一與半球齒輪二尺寸一致,傳動齒輪一和傳動齒輪二的尺寸一致,所述半球齒輪一的半徑與傳動齒輪一的半徑一致。
29、綜上所述,本發明實施例與現有技術相比具有以下有益效果:
30、1.在本發明中,將夾爪調節至待抓取物件的外部,電機一驅動轉盤一旋轉,轉盤一通過滑槽二與滑柱二滑動配合以及滑桿與連接架滑動配合的方式帶動對應的夾爪向下轉動,若干個夾爪通過向下轉動的方式對物件進行抓取,可以實現物件的穩定抓取;
31、2.在本發明中,在對夾爪進行拆卸時,只需要旋轉旋鈕并向下抽出連接座一,即可實現連接座一和連接座二的快速分離,在對夾爪進行安裝時,只需將放置槽與卡接板對齊并靠近,即可實現連接座一和連接座二的快速安裝,提高了裝置的便捷性,實現了連接座一和連接座二之間的快速拆裝,避免了使用工具的繁瑣,便于在無工具的情況下實現夾爪的更換;
32、3.在本發明中,當需要抓取的地方存在障礙物時,電機二驅動傳動齒輪二旋轉,傳動齒輪二通過與傳動齒輪一相嚙合以及連接板分別與固定桿及轉桿活動連接的方式帶動固定桿繞轉桿向上轉動,固定桿帶動連接座二同步轉動,連接座二帶動半球齒輪一同步轉動,半球齒輪一通過固定桿、轉桿和連接板連接的方式確保半球齒輪一在轉動的過程中始終與半球齒輪二相嚙合,同時,連接座二通過連接組件與連接座一相連接的方式帶動夾爪同步轉動,便于裝置繞開障礙物對物件進行抓取,避免了現有的夾爪在折線方向上對物件進行抓取的不便,提高裝置的適用性;
33、4.在本發明中,當需要對夾爪進行旋轉時,電機三驅動半球齒輪二旋轉,半球齒輪二通過與半球齒輪一相嚙合的方式帶動連接座二同步旋轉,可以實現物件的同步旋轉,滿足裝置的旋轉操作需求。
34、為更清楚地闡述本發明的結構特征和功效,下面結合附圖與具體實施例來對本發明進行詳細說明。
技術特征:
1.一種水下機械臂多功能組合手爪,包括連接架,所述連接架外側周向鉸接有若干個夾爪,其特征在于,所述連接架上設有連接座一,所述連接座一遠離連接架的一端設有連接座二,所述連接座二遠離連接座一的一端活動設有連接筒;
2.根據權利要求1所述的水下機械臂多功能組合手爪,其特征在于,所述抓取組件包括:
3.根據權利要求1所述的水下機械臂多功能組合手爪,其特征在于,所述連接座二靠近連接架的一端設有連接盤,所述連接座二和連接盤之間連接有連桿,所述連接座一靠近連接座二的一端設有放置槽。
4.根據權利要求3所述的水下機械臂多功能組合手爪,其特征在于,所述連接組件包括:
5.根據權利要求1所述的水下機械臂多功能組合手爪,其特征在于,所述角度調節組件包括:
6.根據權利要求1所述的水下機械臂多功能組合手爪,其特征在于,所述連接架設為正多邊形塊且連接架的邊數至少為3個。
7.根據權利要求1所述的水下機械臂多功能組合手爪,其特征在于,所述夾爪的數量與連接架的邊數一致,所述夾爪為并行夾爪、鉗形夾爪、角形夾爪或斜爪夾爪中的一種。
8.根據權利要求1所述的水下機械臂多功能組合手爪,其特征在于,所述連接筒遠離連接架的一端兩端貫穿設有連接孔,所述連接筒內設有連接槽。
9.根據權利要求4所述的水下機械臂多功能組合手爪,其特征在于,所述連接座二和連接盤相互靠近的一側均設有環槽,所述旋鈕的兩側分別設有與環槽滑動配合的連接環,所述旋鈕的外側周向分布有若干個凸條。
10.根據權利要求5所述的水下機械臂多功能組合手爪,其特征在于,所述半球齒輪一與半球齒輪二尺寸一致,傳動齒輪一和傳動齒輪二的尺寸一致,所述半球齒輪一的半徑與傳動齒輪一的半徑一致。
技術總結
本發明公開了一種水下機械臂多功能組合手爪,屬于機械臂技術領域,一種水下機械臂多功能組合手爪包括連接架,所述連接架外側周向鉸接有若干個夾爪,所述連接架和夾爪之間連接有抓取組件,所述連接架上設有連接座一,所述連接座一遠離連接架的一端設有連接座二,所述連接座一和連接座二之間設有連接組件,所述連接座二遠離連接座一的一端活動設有連接筒,所述連接座二和連接筒之間設有角度調節組件,具有穩定抓取、快速拆裝、便捷更換、角度調節、滿足不同角度的使用需求、靈活適用、結構可靠和簡便實用的優點。
技術研發人員:曹承昊,伍哲,余良武,陳漢濤,張悅,曾研
受保護的技術使用者:中國人民解放軍海軍工程大學
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!