一種具有高載物能力的快遞分揀機器人的制作方法
本發明涉及快遞分揀機器人,具體為一種具有高載物能力的快遞分揀機器人。
背景技術:
1、快遞又稱速遞或快運,是指物流企業通過自身的獨立網絡或以聯營合作的方式,將用戶委托的文件或包裹,快捷而安全地從發件人送達收件人的門到門的新型運輸方式。隨著快遞行業的快速發展,智能快遞分揀機器人的應用原來越廣泛,通過智能快遞分揀機器人能夠對大量的快遞進行快速準確的分揀,智能快遞分揀機器人能夠將指定的快遞運輸投放到指定的分揀井中。
2、現有的快遞分揀機器人在使用時通過智能自行底座驅動載物斗移動來負載包括移動進行分揀作業,由于快遞分揀機器人的整體結構是固定的,一個型號的快遞分揀機器人只能分揀其承載能力范圍內的包裹,無法分揀重量超出分揀機器人載重能力之外的包裹,所以只能使用大負載的分揀機器人來對重量較小的包裹和重量較大的包裹進行分揀或針對不同重量的包括采用不同負載能力的分揀機器人進行分揀,前者會導致分揀機器人的體積過大,占用的空間較大,從而導致分揀場所的空間利用率降低,后者會導致使用成本和運行調度難度增加。
技術實現思路
1、本發明的目的在于提供一種具有高載物能力的快遞分揀機器人,以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:
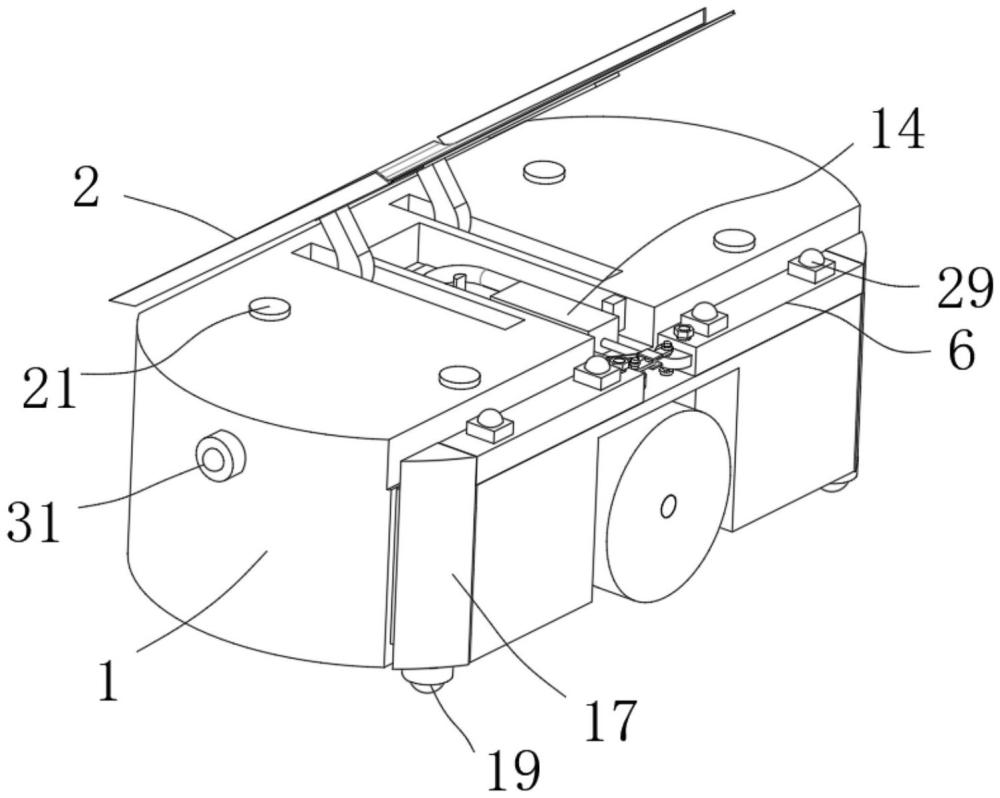
3、本發明提供了一種具有高載物能力的快遞分揀機器人,包括機器人智能行走底座,所述機器人智能行走底座上策的側壁安裝有自卸載物斗,所述機器人智能行走底座上側的側壁與豎直側壁之間開設有收納槽,所述機器人智能行走底座上側的側壁開設有與收納槽連通的安裝槽,所述收納槽與安裝槽內連接有快速展開機構;
4、所述快速展開機構包括兩個對稱固定連接于收納槽內的固定軸,兩個所述固定軸外均轉動套設有偏轉臂,所述固定軸的上端螺紋套設有防脫螺母,所述偏轉臂位于防脫螺母的下方,兩個所述偏轉臂相對一側的側壁均固定連接有半圓形板,兩個所述半圓形板上均開設有軸孔,兩個所述軸孔內均轉動套接有銷軸,兩個所述銷軸外均轉動套設有連接件,所述銷軸的兩端均固定連接有防脫帽,兩個所述連接件上均開設有銷孔,所述安裝槽內固定連接有電推桿,所述電推桿的輸出端固定連接有u型板,所述u型板內固定連接有插銷,所述插銷通過兩個銷孔貫穿兩個連接件,所述偏轉臂遠離半圓形板的一側固定連接有支撐臂,所述支撐臂垂直于偏轉臂,所述機器人智能行走底座的豎直側壁開設有與支撐臂相對應的隱藏槽,所述支撐臂的下端固定連接有萬向滾珠。
5、在上述的一種具有高載物能力的快遞分揀機器人中,所述安裝槽內固定連接有u型液壓桿,所述u型液壓桿的兩端分別安裝有主動桿和從動桿,所述主動桿與u型板之間固定連接有連接片,所述從動桿上固定連接有移動磁石,所述自卸載物斗的下側開設有凹槽,所述凹槽內滑動連接有延展板,所述延展板的下側固定連接有與移動磁石相對應的固定磁石。
6、在上述的一種具有高載物能力的快遞分揀機器人中,所述偏轉臂上側的側壁固定連接有多個安裝塊,所述安裝塊上轉動安裝有滾珠,所述滾珠的上側與機器人智能行走底座的上側齊平。
7、在上述的一種具有高載物能力的快遞分揀機器人中,所述支撐臂的豎直側壁固定連接有緩沖墊片,所述緩沖墊片的具體材質為橡膠。
8、在上述的一種具有高載物能力的快遞分揀機器人中,所述機器人智能行走底座的左右兩端均安裝有全景攝像頭,所述全景攝像頭位于機器人智能行走底座靠近上側的位置。
9、在上述的一種具有高載物能力的快遞分揀機器人中,所述機器人智能行走底座上上側的側壁固定連接有多個橡膠塊,所述橡膠塊位于機器人智能行走底座靠近四角處的位置。
10、在上述的一種具有高載物能力的快遞分揀機器人中,所述安裝槽的槽壁固定連接有多個限位卡塊,所述u型液壓桿位于多個限位卡塊之間。
11、在上述的一種具有高載物能力的快遞分揀機器人中,所述機器人智能行走底座包括底座主體,所述底座主體上對稱安裝有兩個行走輪,所述底座主體的底部對稱安裝有兩個轉向輪。
12、在上述的一種具有高載物能力的快遞分揀機器人中,所述固定磁石遠離延展板的一側開設有與移動磁石相對應的u型卡槽。
13、在上述的一種具有高載物能力的快遞分揀機器人中,所述凹槽相對一側的槽壁均固定連接有限位卡條,所述延展板上對稱開設有兩個與限位卡條相匹配的限位滑槽,兩個所述限位卡條分別位于兩個限位滑槽內。
14、與現有技術相比,本發明的有益效果是:
15、1、本發明通過設置的快速展開機構,需要分揀重量較大的快速時,控制電推桿收縮,電推桿的輸出端帶動u型板移動,u型板帶動插銷移動,插銷拉動兩個連接件移動,使兩個連接件偏轉,兩個連接件帶動兩個半圓形板偏轉,兩個半圓形板帶動兩個偏轉臂以固定軸為軸心偏轉,從而能夠使兩個偏轉臂移動到收納槽外,使兩個偏轉臂呈八字形分布,偏轉臂帶動支撐臂移動,使支撐臂脫離隱藏槽,從而能夠將兩個支撐臂快速展開,設置的兩個支撐臂能夠對快遞分揀機器人進行支撐,從而能夠提高快遞分揀機器人的載重能力,能夠對重量較大的包裹進行分揀,需要分揀重量較小的包裹時,控制電推桿使快速展開機構收縮,使支撐臂收縮在隱藏槽中,從而能夠避免快速展開機構占用空間,本快遞分揀機器人能夠根據快遞的實際重量來對載重能力進行快速調節,有效的提高了快遞分揀機器人使用的靈活性,且能夠避免快遞分揀機器人體積過大導致空間利用率較低的問題,還有效的降低了快遞分揀機器人的使用成本和運行調度難度。
16、2、本發明通過設置的u型液壓桿、主動桿、從動桿、連接片、移動磁石、凹槽、延展板和固定磁石,使用時,u型板帶動連接片移動,連接片擠壓主動桿,主動桿擠壓u型液壓桿,從而能夠驅動從動桿移動,從動桿帶動移動磁石移動,移動磁石帶動固定磁石移動,固定磁石帶動延展板伸出凹槽,從而能夠擴大自卸載物斗的面積,且展開的快速展開機構能夠對延展板進行支撐,從而能夠使快遞分揀機器人能夠承載體積更大的快遞包裹,有效的提高了快遞分揀機器人的載物性能和適用范圍,且當自卸載物斗傾斜卸料時,延展板能夠在重力的作用下自動復位。
技術特征:
1.一種具有高載物能力的快遞分揀機器人,包括機器人智能行走底座(1),其特征在于:所述機器人智能行走底座(1)上策的側壁安裝有自卸載物斗(2),所述機器人智能行走底座(1)上側的側壁與豎直側壁之間開設有收納槽(3),所述機器人智能行走底座(1)上側的側壁開設有與收納槽(3)連通的安裝槽(4),所述收納槽(3)與安裝槽(4)內連接有快速展開機構;
2.根據權利要求1所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述安裝槽(4)內固定連接有u型液壓桿(20),所述u型液壓桿(20)的兩端分別安裝有主動桿(21)和從動桿(22),所述主動桿(21)與u型板(15)之間固定連接有連接片(23),所述從動桿(22)上固定連接有移動磁石(24),所述自卸載物斗(2)的下側開設有凹槽(25),所述凹槽(25)內滑動連接有延展板(26),所述延展板(26)的下側固定連接有與移動磁石(24)相對應的固定磁石(27)。
3.根據權利要求1所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述偏轉臂(6)上側的側壁固定連接有多個安裝塊(28),所述安裝塊(28)上轉動安裝有滾珠(29),所述滾珠(29)的上側與機器人智能行走底座(1)的上側齊平。
4.根據權利要求1所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述支撐臂(17)的豎直側壁固定連接有緩沖墊片(30),所述緩沖墊片(30)的具體材質為橡膠。
5.根據權利要求1所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述機器人智能行走底座(1)的左右兩端均安裝有全景攝像頭(31),所述全景攝像頭(31)位于機器人智能行走底座(1)靠近上側的位置。
6.根據權利要求5所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述機器人智能行走底座(1)上上側的側壁固定連接有多個橡膠塊(32),所述橡膠塊(32)位于機器人智能行走底座(1)靠近四角處的位置。
7.根據權利要求1所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述安裝槽(4)的槽壁固定連接有多個限位卡塊(33),所述u型液壓桿(20)位于多個限位卡塊(33)之間。
8.根據權利要求6所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述機器人智能行走底座(1)包括底座主體(34),所述底座主體(34)上對稱安裝有兩個行走輪(35),所述底座主體(34)的底部對稱安裝有兩個轉向輪(36)。
9.根據權利要求2所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述固定磁石(27)遠離延展板(26)的一側開設有與移動磁石(24)相對應的u型卡槽(37)。
10.根據權利要求2所述的一種具有高載物能力的快遞分揀機器人,其特征在于:所述凹槽(25)相對一側的槽壁均固定連接有限位卡條(38),所述延展板(26)上對稱開設有兩個與限位卡條(38)相匹配的限位滑槽(39),兩個所述限位卡條(38)分別位于兩個限位滑槽(39)內。
技術總結
本發明涉及快遞分揀機器人技術領域,具體為一種具有高載物能力的快遞分揀機器人。本發明包括機器人智能行走底座,所述機器人智能行走底座上策的側壁安裝有自卸載物斗,所述機器人智能行走底座上側的側壁與豎直側壁之間開設有收納槽,所述機器人智能行走底座上側的側壁開設有與收納槽連通的安裝槽,所述收納槽與安裝槽內連接有快速展開機構。本發明能夠根據快遞的實際重量來對載重能力進行快速調節,有效的提高了快遞分揀機器人使用的靈活性,且能夠避免快遞分揀機器人體積過大導致空間利用率較低的問題,還有效的降低了快遞分揀機器人的使用成本和運行調度難度。
技術研發人員:張廣峰
受保護的技術使用者:山東寧通智慧科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!