一種間距可調的機械手裝置的制作方法
本技術涉及機械手,具體為一種間距可調的機械手裝置。
背景技術:
1、機械手是一種能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置,特點是可以通過編程來完成各種預期的作業,構造和性能上兼有人和機械手機器各自的優點,機械手是最早出現的工業機器人,也是最早出現的現代機器人,它可代替人的繁重勞動以實現生產的機械化和自動化,能在有害環境下操作以保護人身安全,因而廣泛應用于機械制造、冶金、電子、輕工和原子能等部門。
2、根據公示的一種間距可調節的機械手裝置(公開號:cn?215701794?u),包括固定框架,所述固定框架上表面固定安裝有回轉盤,所述固定框架底面固定設有轉動裝置,回轉盤的內圈與固定框架固定連接,底盤與外圈螺紋連接,上述申請中通過外圈對底盤的底面支撐效果,電機能穩定帶動底盤和夾持裝置夾持周圍物品;第一氣缸推動大臂能沿第一底座上下轉動,同時第二氣缸推動中臂沿大臂轉動,從而能實現夾持裝置夾持物品的距離變化;第三氣缸能通過圓形固定塊使一組第一拉桿逆向運動,并使一組弧形夾塊逆向滑動,從而改變夾持間距,同時第四氣缸推動第二調節板上下運動,能通過逆向運動的第二拉桿帶動弧形夾塊逆向運動,從而完成夾持工作,但上述裝置不能夠調節機械手的夾持間距,且在夾持物體的同時不能夠對整個裝置進行有效緩沖減震,容易造成機械手主體損壞。
技術實現思路
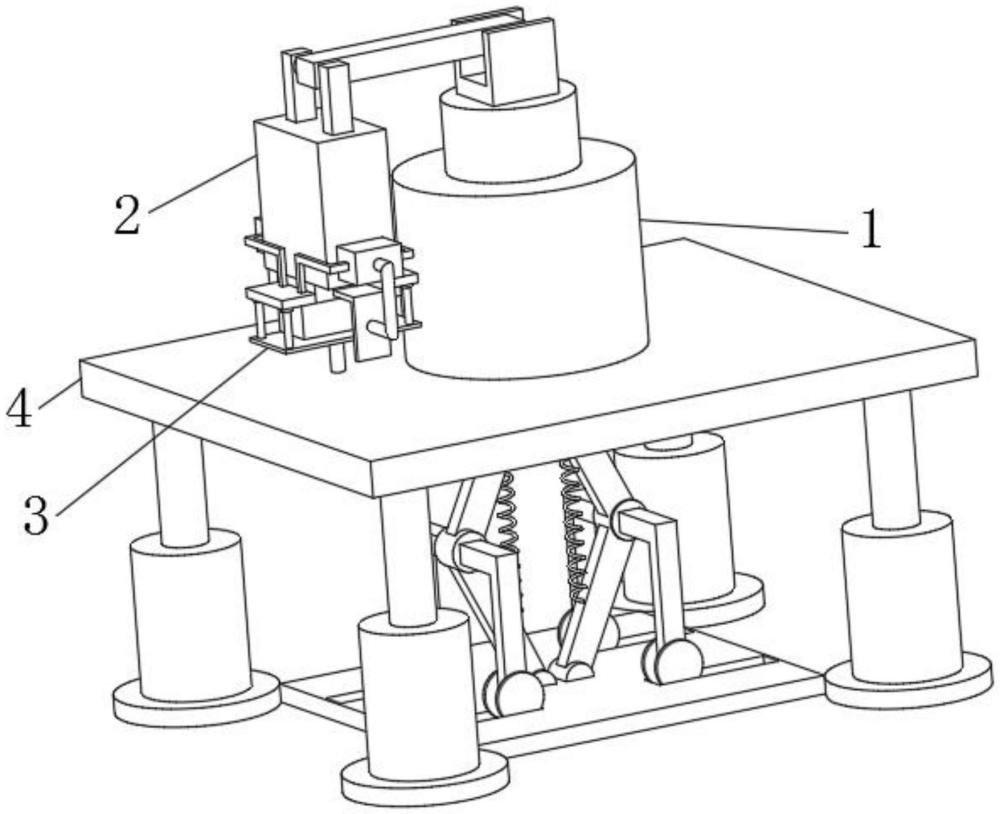
1、針對現有技術的不足,本實用新型提供了一種間距可調的機械手裝置,解決了上述背景技術中提出的問題。為實現以上目的,本實用新型通過以下技術方案予以實現:一種間距可調的機械手裝置,包括控制組件,所述控制組件的底部轉動且電性連接有機械手主體,所述機械手主體上設置有間距調節裝置,所述控制組件的下方設置有減震緩沖裝置;
2、所述間距調節裝置包括收縮夾持塊,所述收縮夾持塊的兩側固定連接有連接板,所述連接板的底部固定連接有彈性伸縮桿,所述彈性伸縮桿的底部固定連接有擠壓板,所述擠壓板的底部固定連接有推桿,所述擠壓板的上方設置有氣囊,所述氣囊的頂部固定連接有輸氣管,所述輸氣管遠離氣囊的一側固定連接有氣壓艙,所述氣壓艙的側邊滑動連接有氣壓桿。
3、優選的,所述收縮夾持塊固定連接在機械手主體的底部,所述收縮夾持塊和連接板的底部固定連接有氣囊,收縮夾持塊能夠有效的對物體進行夾持固定,實用性較強。
4、優選的,所述氣壓艙固定連接在機械手主體的兩側,所述氣壓桿遠離氣壓艙的一側固定連接有收縮夾持塊,氣壓艙在內部注入氣體后能夠帶動氣壓桿進行運動。
5、優選的,所述減震緩沖裝置包括固定板,所述固定板的底部固定連接有彈性支撐桿,所述固定板的底部轉動連接有支撐桿一,所述支撐桿一的底部轉動連接有轉軸,所述轉軸的兩側固定連接有連接桿,所述連接桿的底部轉動連接有減速輪,所述轉軸的底部轉動連接有支撐桿二,所述支撐桿一與支撐桿二之間通過彈簧固定連接,所述支撐桿二的底部與底板轉動連接,減震緩沖裝置能夠有效對控制組件和機械手主體進行有效減震緩沖。
6、優選的,所述固定板的底部固定連接有控制組件,所述固定板的支撐桿一與支撐桿二呈對稱狀態設置,固定板能夠有效固定控制組件的位置。
7、優選的,所述底板的頂部開設有減速滑槽,所述減速滑槽的內部滑動連接有減速輪,所述減速輪的材質為摩擦系數大的橡膠材質,底板能夠有效對支撐桿二進行有效支撐。
8、本實用新型提供了一種間距可調的機械手裝置。具備以下有益效果:
9、(1)本申請通過間距調節裝置,能夠在對物體進行固定的同時,通過推桿先觸碰物體,通過擠壓物體推動推桿上升,推桿會帶動擠壓板上升擠壓氣囊,氣囊會將內部的氣體通過輸氣管輸送到氣壓艙的內部,氣壓艙會帶動氣壓桿進行運動,氣壓桿會帶動收縮夾持塊進行拉伸,增加收縮夾持塊的夾持間距,實用性較強。
10、(2)本申請通過減震緩沖裝置,能夠在機械手主體夾持物體的同時,受到物體自身重力的擠壓,彈性支撐桿會在重力擠壓的作用下進行收縮,同時支撐桿一和支撐桿二會在擠壓力和轉軸的作用下進行轉動,轉軸會帶動連接桿和減速輪進行運動,減速輪會在底板上端的減速滑槽內進行滑動,達到減震緩沖效果,進一步加強了整個裝置的實用性。
技術特征:
1.一種間距可調的機械手裝置,包括控制組件(1),其特征在于:所述控制組件(1)的底部轉動且電性連接有機械手主體(2),所述機械手主體(2)上設置有間距調節裝置(3),所述控制組件(1)的下方設置有減震緩沖裝置(4);
2.根據權利要求1所述的一種間距可調的機械手裝置,其特征在于:所述收縮夾持塊(31)固定連接在機械手主體(2)的底部,所述收縮夾持塊(31)和連接板(32)的底部固定連接有氣囊(36)。
3.根據權利要求2所述的一種間距可調的機械手裝置,其特征在于:所述氣壓艙(38)固定連接在機械手主體(2)的兩側,所述氣壓桿(39)遠離氣壓艙(38)的一側固定連接有收縮夾持塊(31)。
4.根據權利要求3所述的一種間距可調的機械手裝置,其特征在于:所述減震緩沖裝置(4)包括固定板(41),所述固定板(41)的底部固定連接有彈性支撐桿(42),所述固定板(41)的底部轉動連接有支撐桿一(43),所述支撐桿一(43)的底部轉動連接有轉軸(44),所述轉軸(44)的兩側固定連接有連接桿(45),所述連接桿(45)的底部轉動連接有減速輪(46),所述轉軸(44)的底部轉動連接有支撐桿二(47),所述支撐桿一(43)與支撐桿二(47)之間通過彈簧(48)固定連接,所述支撐桿二(47)的底部與底板(49)轉動連接。
5.根據權利要求4所述的一種間距可調的機械手裝置,其特征在于:所述固定板(41)的底部固定連接有控制組件(1),所述固定板(41)的支撐桿一(43)與支撐桿二(47)呈對稱狀態設置。
6.根據權利要求5所述的一種間距可調的機械手裝置,其特征在于:所述底板(49)的頂部開設有減速滑槽,所述減速滑槽的內部滑動連接有減速輪(46),所述減速輪(46)的材質為摩擦系數大的橡膠材質。
技術總結
本技術公開了一種間距可調的機械手裝置,涉及機械手技術領域。該間距可調的機械手裝置,包括控制組件,控制組件的底部轉動且電性連接有機械手主體,機械手主體上設置有間距調節裝置,控制組件的下方設置有減震緩沖裝置;間距調節裝置包括收縮夾持塊,收縮夾持塊的兩側固定連接有連接板,連接板的底部固定連接有彈性伸縮桿,本申請通過間距調節裝置,能夠在對物體進行固定的同時,通過推桿先觸碰物體,通過擠壓物體推動推桿上升,推桿會帶動擠壓板上升擠壓氣囊,氣囊會將內部的氣體通過輸氣管輸送到氣壓艙的內部,氣壓艙會帶動氣壓桿進行運動,氣壓桿會帶動收縮夾持塊進行拉伸,增加收縮夾持塊的夾持間距,實用性較強。
技術研發人員:胡叢叢
受保護的技術使用者:合肥蔦均茲機械科技有限公司
技術研發日:20231218
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!