一種工業機器人的固定底盤的制作方法
本技術涉及工業機器人領域,具體涉及一種工業機器人的固定底盤。
背景技術:
1、工業機器人是廣泛用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能,經過檢索,現有技術(申請號:cn202122098344.9),文中記載了“在工業機器人的底部放入第一安裝槽4的內部之后,旋轉第二安裝槽5內部的螺紋桿6使螺紋桿6與工業機器人的底部相連接,完成旋轉底盤3與工業機器人的連接,當機器人需要進行旋轉時,旋轉蝸桿9,蝸桿9帶動旋轉底盤3進行旋轉,從而調整工業機器人的角度”,但是現有技術中蝸桿調節固定底盤轉動時帶動底盤上端工業機器人夾持重物移動方位,造成底盤負載重量不平衡發生不穩、傾倒的問題。
技術實現思路
1、為克服現有技術所存在的缺陷,現提供一種工業機器人的固定底盤,以解決在現有技術中蝸桿調節固定底盤轉動時帶動底盤上端工業機器人夾持重物移動方位,造成底盤負載重量不平衡發生不穩、傾倒的問題。
2、為實現上述目的,提供一種工業機器人的固定底盤,包括:機器人底盤和底座板,所述機器人底盤下端連接有底座板,
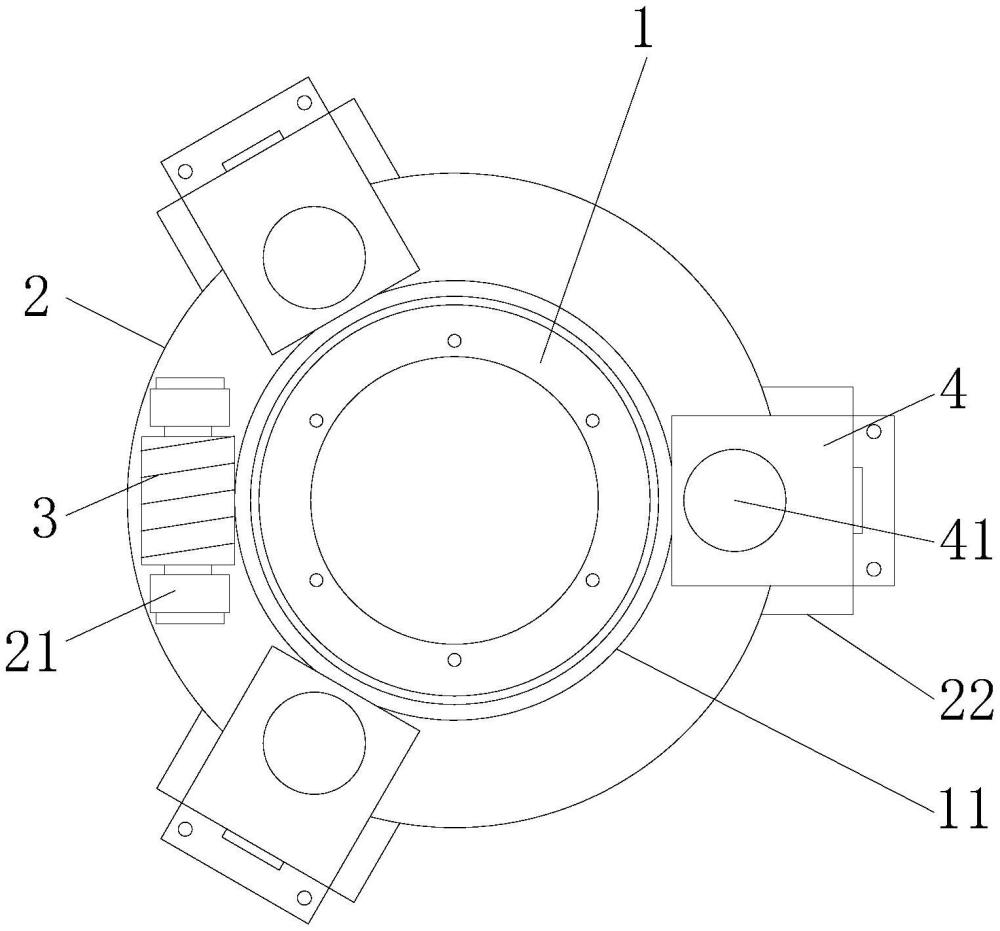
3、所述機器人底盤外側環形分布有三組平衡支撐塊,所述平衡支撐塊上端板面嵌入固定有液壓伸縮桿,所述底座板外側通過滑塊與平衡支撐塊側面相連接,所述底座板上表面固定有平衡壓板,所述平衡壓板上端通過銜接塊連接有支撐彈簧,所述銜接塊上表面鑲嵌安裝有壓力傳感器。
4、進一步的,所述機器人底盤外表面螺接安裝有傳動齒輪,所述傳動齒輪左側齒面嚙合有蝸桿,所述座板下表面安裝有萬向輪。
5、進一步的,所述蝸桿前后桿體通過固定架與底座板相固定,所述平衡支撐塊前后側面設置有限位滑槽;且限位滑槽內滑接有滑塊。
6、進一步的,所述平衡支撐塊呈三角形分布在機器人底盤外側處;且平衡支撐塊呈z字形,所述平衡支撐塊下端板面開設有固定孔。
7、進一步的,所述平衡支撐塊側面嵌入安裝有壓力控制器;且壓力控制器電線連接有壓力傳感器和液壓伸縮桿。
8、進一步的,所述平衡壓板上表面焊接有兩組銜接塊,所述支撐彈簧上端與平衡支撐塊上端板體相連接;且液壓伸縮桿位于兩組支撐彈簧中部處。
9、進一步的,所述平衡支撐塊、液壓伸縮桿、平衡壓板、支撐彈簧和壓力傳感器構成機器人底盤重量平衡機構。
10、本實用新型的有益效果在于,本實用新型的工業機器人的固定底盤利用平衡支撐塊三角分布在工業機器人底盤外側處,通過壓力傳感器感應平衡壓板擠壓支撐彈簧的壓力大小,三處液壓伸縮桿反向推動平衡壓板將壓力值回零,達到底盤重量的平衡狀態,便于自動調節、維持工業機器人底盤的重量均衡,保障工業機器人底盤穩固的安置在地面上,避免受夾持重物影響造成底盤出現傾倒、不穩,加強工業機器人的固定底盤的穩固性。
技術特征:
1.一種工業機器人的固定底盤,包括:機器人底盤(1)和底座板(2),所述機器人底盤(1)下端連接有底座板(2),其特征在于:
2.根據權利要求1所述的一種工業機器人的固定底盤,其特征在于,所述機器人底盤(1)外表面螺接安裝有傳動齒輪(11),所述傳動齒輪(11)左側齒面嚙合有蝸桿(3),所述座板(2)下表面安裝有萬向輪(23)。
3.根據權利要求2所述的一種工業機器人的固定底盤,其特征在于,所述蝸桿(3)前后桿體通過固定架(21)與底座板(2)相固定,所述平衡支撐塊(4)前后側面設置有限位滑槽(44);且限位滑槽(44)內滑接有滑塊(22)。
4.根據權利要求1所述的一種工業機器人的固定底盤,其特征在于,所述平衡支撐塊(4)呈三角形分布在機器人底盤(1)外側處;且平衡支撐塊(4)呈z字形,所述平衡支撐塊(4)下端板面開設有固定孔(43)。
5.根據權利要求1所述的一種工業機器人的固定底盤,其特征在于,所述平衡支撐塊(4)側面嵌入安裝有壓力控制器(42);且壓力控制器(42)電線連接有壓力傳感器(53)和液壓伸縮桿(41)。
6.根據權利要求1所述的一種工業機器人的固定底盤,其特征在于,所述平衡壓板(5)上表面焊接有兩組銜接塊(52),所述支撐彈簧(51)上端與平衡支撐塊(4)上端板體相連接;且液壓伸縮桿(41)位于兩組支撐彈簧(51)中部處。
7.根據權利要求1所述的一種工業機器人的固定底盤,其特征在于,所述平衡支撐塊(4)、液壓伸縮桿(41)、平衡壓板(5)、支撐彈簧(51)和壓力傳感器(53)構成機器人底盤(1)重量平衡機構。
技術總結
本技術提供了一種工業機器人的固定底盤,涉及工業機器人領域,包括:機器人底盤和底座板,所述機器人底盤下端連接有底座板,所述機器人底盤外側環形分布有三組平衡支撐塊,所述平衡支撐塊上端板面嵌入固定有液壓伸縮桿,所述底座板外側通過滑塊與平衡支撐塊側面相連接,所述底座板上表面固定有平衡壓板,所述平衡壓板上端通過銜接塊連接有支撐彈簧,所述銜接塊上表面鑲嵌安裝有壓力傳感器。本技術解決了現有技術中蝸桿調節固定底盤轉動時帶動底盤上端工業機器人夾持重物移動方位,造成底盤負載重量不平衡發生不穩、傾倒的問題。
技術研發人員:陳榮斌,林安江
受保護的技術使用者:廣東印星科技有限公司
技術研發日:20231213
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!