一種神經調控康復機器人系統的制作方法
本申請涉及康復醫療,特別是涉及一種神經調控康復機器人系統。
背景技術:
1、神經退行性疾病和精神類疾病的臨床表現各異,導致仍缺乏有效的針對性治療和康復方案。近年來,研究發現,基于電、磁、光、聲等手段開發的新型神經調控技術,可以有效地治療或緩解各類藥物難治性精神類疾病的臨床癥狀。目前已有紅外光學導航定位的機器人輔助系統。治療前,醫生在病人頭部及機械臂上固定紅外反射小球。系統發射紅外光,被小球反射后捕捉,計算時間和角度確定三維位置。機器人輔助定位神經調控刺激器至目標區域完成刺激。
2、然而現有的系統存在以下問題:1)現有系統應用效果差,臨床與實驗誤差大,復現能力弱;2)紅外光學導航系統受環境干擾,對光學要求高,存在遮擋現象,導致定位丟失,患者佩戴標志物不適,晃動大,配準精度低;3)導航機器人系統多源自工業機器人技術移植,安全性關注不足,結構大,不適合狹小空間,空間靈巧度和定位精度低,難以覆蓋全腦刺激目標區域;4)不可達目標區域需人工定位導航,耗時費力;5)刺激器類型受限,無法擴展以滿足不同調控需求。
技術實現思路
1、本申請的目的是提供一種神經調控康復機器人系統,能夠提高治療的精確性和有效性。
2、為實現上述目的,本申請提供了如下方案:
3、第一方面,本申請提供了一種神經調控康復機器人系統,包括:
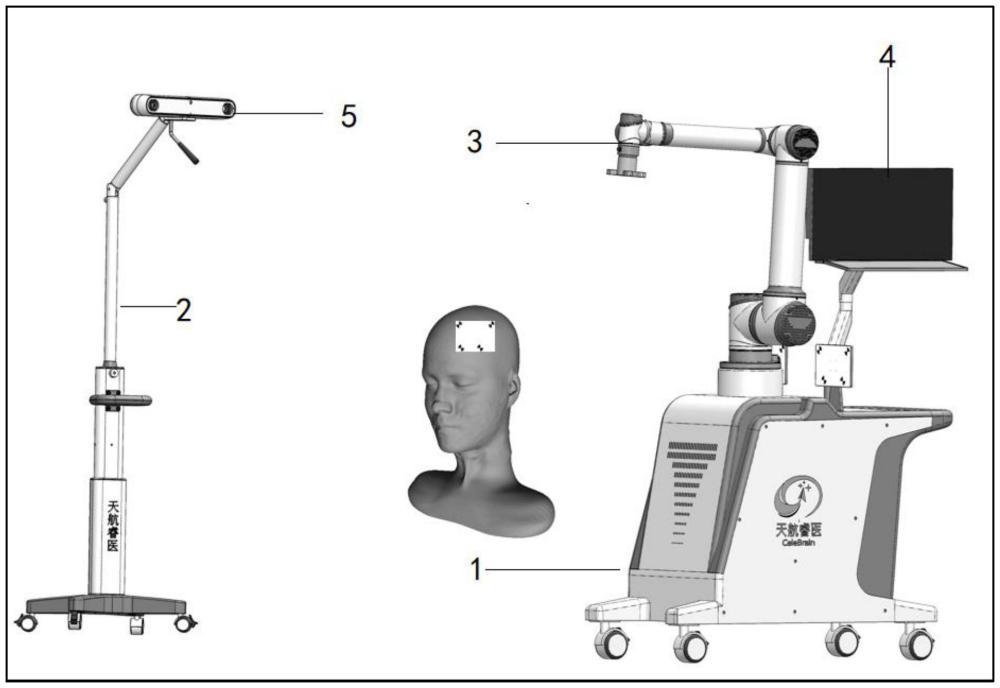
4、所述硬件結構包括:主體臺車和雙目攝像頭定位裝置;
5、所述主體臺車上設有用于固定調控刺激器的醫療協作機器人;所述醫療協作機器人的末端設置有用于固定調控刺激器的快拆結構;所述主體臺車上還設有人機交互顯示屏;所述雙目攝像頭定位裝置用于實時捕捉患者的位置和姿態信息。
6、所述軟件部分包括:主控模塊、康復策略生成模塊、通訊模塊、定位程序控制模塊和機器人控制模塊。
7、所述主控模塊通過通信模塊與定位程序控制模塊、機器人控制模塊建立實時的通信連接;所述定位程序控制模塊用于控制醫療協作機器人對患者的神經調控靶點進行定位;所述機器人控制模塊用于基于動作指令控制醫療協作機器人發生動作。
8、所述康復策略生成模塊用于根據患者信息,生成特定的康復策略。
9、可選的,所述康復策略生成模塊,具體包括:腦影像數據預處理子模塊、調控靶點計算子模塊和調控方案預裝載子模塊。
10、所述腦影像數據預處理子模塊,用于:對患者的腦影像數據進行數據處理,得到處理后的腦影像數據;所述數據處理包括:基于腦影像數據中的彌散加權影像,將腦影像數據中的病灶圖像通過線性變換配準至mni標準空間以及對腦影像數據中的靜息態功能磁共振影像進行標準化處理。
11、所述調控靶點計算子模塊,用于基于處理后的腦影像數據,對彌散加權影像和靜息態功能磁共振影像進行分析,得到患者腦網絡中的功能和結構失聯區域,并基于失聯區域確定所述患者的神經調控靶點位置。
12、所述調控方案預裝載子模塊,用于根據所述患者的病情和神經調控靶點位置,從預裝載的調控方案庫中選擇匹配的調控方案;所述調控方案是根據神經調控技術、調控參數設置、應用場景、適用癥狀、靶點位置和刺激參數構成的。
13、可選的,所述通訊模塊的通信方式包括websocket和http;所述通訊模塊的信息傳輸方式包括圖像數據和json格式的字符串數據。
14、可選的,所述定位程序控制模塊,具體包括:攝像頭參數配置子模塊、光學標志物校準子模塊和定位效果驗證子模塊。
15、所述攝像頭參數配置子模塊,用于對攝像頭進行初始化和參數設置;所述參數配置包括分辨率、幀率、曝光時間、焦距參數的配置。
16、所述光學標志物校準子模塊,用于基于圖像處理算法,識別和跟蹤光學標志物的位置,并使用人臉點云配準算法將光學標志物的位置與患者的腦部影像數據進行配準。
17、所述定位效果驗證子模塊,用于對配準的結果進行驗證和調整。
18、可選的,所述機器人控制模塊,具體包括:運動仿真子模塊、運動控制子模塊和負載/力傳感器校準子模塊。
19、所述運動仿真子模塊,用于通過三維建模技術,加載患者和康復設備的三維模型,并構建與實際治療環境一致的虛擬場景;根據定位程序控制模塊的目標位置,規劃機器人的運動軌跡。
20、所述運動控制子模塊,用于將運動仿真子模塊中生成的運動路徑和參數轉化為實際的操作指令,控制機器人執行預定的動作。
21、所述負載/力傳感器校準子模塊,用于對醫療協作機器人采用的六維力和力矩傳感器進行靜態標定,測量和校準負載的重心位置和力矩參數。
22、可選的,還包括:人機交互界面模塊;所述人機交互界面模塊用于查看調控過程中的各種數據和反饋信息。
23、可選的,所述雙目攝像頭定位裝置的底部設置有四個可旋轉輪子;雙目攝像頭安裝在一個可伸縮的支架上,所述支架的一端設置有俯仰角調節結構,所述俯仰角調節結構與雙目攝像頭連接。
24、可選的,所述醫療協作機器人擁有六個自由度;所述六個自由度包括:x軸平移、y軸平移、z軸平移、x軸旋轉、y軸旋轉和z軸旋轉。
25、可選的,所述快拆結構的一端固定在醫療協作機器人的機械臂末端,所述機械臂末端有四個m6的螺絲孔,所述快拆結構的一端通過四個m6的螺絲固定到所述機械臂末端;所述快拆結構的另一端設置有一個定位孔、橫桿和四根立柱;四根立柱通過四個m4的螺絲與調控刺激器連接,調控刺激器的連接部分還包括一個彈簧卡扣和定位孔,將調控刺激器的連接部分的定位孔與快拆結構的定位孔對齊,通過橫桿,使彈簧卡扣固定在快拆結構。
26、可選的,所述人機交互顯示屏為能夠沿z軸進行360度旋轉的顯示屏。
27、根據本申請提供的具體實施例,本申請公開了以下技術效果:
28、本申請提供了一種神經調控康復機器人系統,硬件結構由主體臺車和雙目攝像頭定位裝置組成。主體臺車上安裝有醫療協作機器人,用于固定調控刺激器,并且該機器人的末端配備有快拆結構以便于調控刺激器的更換。此外,主體臺車上還設有用于人機交互的顯示屏。雙目攝像頭定位裝置負責實時捕捉患者的位置和姿態信息。軟件部分則包括主控模塊、康復策略生成模塊、通訊模塊、定位程序控制模塊和機器人控制模塊。主控模塊通過通訊模塊與定位程序控制模塊、機器人控制模塊建立實時通信連接。定位程序控制模塊的作用是控制醫療協作機器人對患者的神經調控靶點進行精確的定位。機器人控制模塊則負責根據動作指令控制醫療協作機器人的動作。康復策略生成模塊根據患者的具體信息,生成個性化的康復策略。基于本申請提供的系統能夠提高治療的精確性和有效性。
技術特征:
1.一種神經調控康復機器人系統,其特征在于,包括:硬件結構和軟件部分;
2.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述康復策略生成模塊具體包括:腦影像數據預處理子模塊、調控靶點計算子模塊和調控方案預裝載子模塊;
3.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述通訊模塊的通信方式包括websocket和http;所述通訊模塊的信息傳輸方式包括圖像數據和json格式的字符串數據。
4.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述定位程序控制模塊,具體包括:攝像頭參數配置子模塊、光學標志物校準子模塊和定位效果驗證子模塊;
5.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述機器人控制模塊,具體包括:運動仿真子模塊、運動控制子模塊和負載/力傳感器校準子模塊;
6.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,還包括:人機交互界面模塊;所述人機交互界面模塊用于查看調控過程中的各種數據和反饋信息。
7.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述雙目攝像頭定位裝置的底部設置有四個可旋轉輪子;雙目攝像頭安裝在一個可伸縮的支架上,所述支架的一端設置有俯仰角調節結構,所述俯仰角調節結構與雙目攝像頭連接。
8.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述醫療協作機器人擁有六個自由度;所述六個自由度包括:x軸平移、y軸平移、z軸平移、x軸旋轉、y軸旋轉和z軸旋轉。
9.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述快拆結構的一端固定在醫療協作機器人的機械臂末端,所述機械臂末端有四個m6的螺絲孔,所述快拆結構的一端通過四個m6的螺絲固定到所述機械臂末端;所述快拆結構的另一端設置有一個定位孔、橫桿和四根立柱;四根立柱通過四個m4的螺絲與調控刺激器連接,調控刺激器的連接部分還包括一個彈簧卡扣和定位孔,將調控刺激器的連接部分的定位孔與快拆結構的定位孔對齊,通過橫桿,使彈簧卡扣固定在快拆結構。
10.根據權利要求1所述的一種神經調控康復機器人系統,其特征在于,所述人機交互顯示屏為能夠沿z軸進行360度旋轉的顯示屏。
技術總結
本申請公開了一種神經調控康復機器人系統,涉及康復醫療技術領域,該系統包括硬件結構和軟件部分硬件結構含主體臺車與雙目攝像頭定位裝置;主體臺車搭載醫療協作機器人,末端設快拆結構固定調控刺激器,并配人機交互顯示屏;雙目攝像頭定位裝置實時捕捉患者位置與姿態信息;軟件含主控、康復策略生成、通訊、定位程序控制、機器人控制模塊;主控模塊通過通信模塊與其他模塊建立實時連接;定位程序控制模塊負責醫療協作機器人對神經調控靶點的定位;機器人控制模塊根據動作指令控制機器人動作。康復策略生成模塊根據患者信息生成康復策略。基于本申請提供的系統能夠提高治療的精確性和有效性。
技術研發人員:劉濤,藍鑫隆,張爍,劉文勇,劉浩,周怡君,劉子陽
受保護的技術使用者:北京天航睿醫科技有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!